









 本文详细介绍如何在已完成的机器人模型中创建工件坐标及运行路径,包括路径创建步骤、机器人动作类型设置、速度与区域参数调整等,并演示了如何进行仿真运行及录像。
本文详细介绍如何在已完成的机器人模型中创建工件坐标及运行路径,包括路径创建步骤、机器人动作类型设置、速度与区域参数调整等,并演示了如何进行仿真运行及录像。
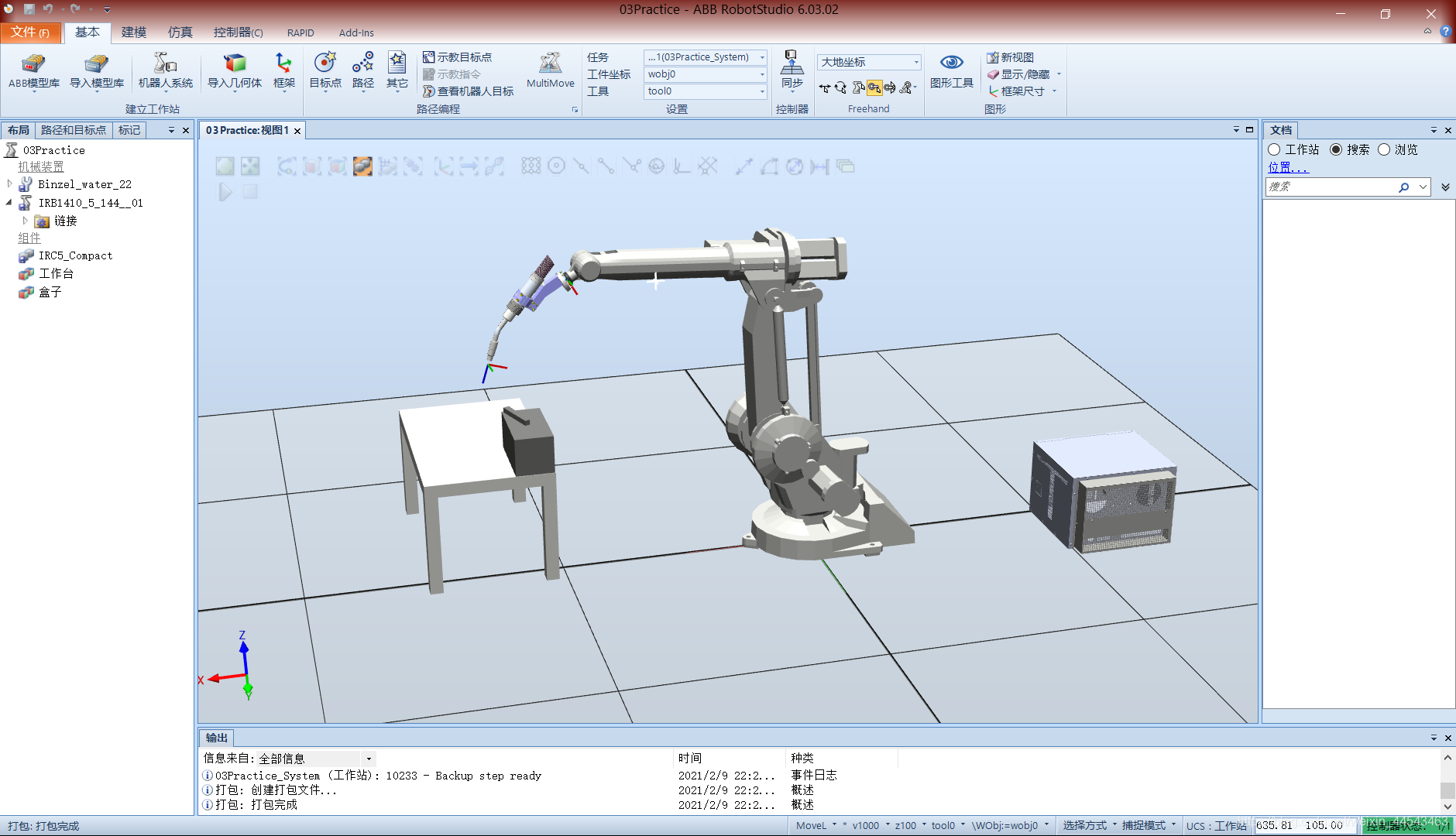
本文在一个已经 搭建好机械模型,同时 完成机器人系统的创建后的机器人运行路径的创建过程。初始时的界面如下:
工程文件已上传到网盘
包括:初始工程文件(03Practice_init.rspag)、完成后的工程文件(03Practice.rspag)、模型文件
链接:https://pan.baidu.com/s/1f0RL-iLBm2Kxd0NbLduv0Q
提取码:rs03
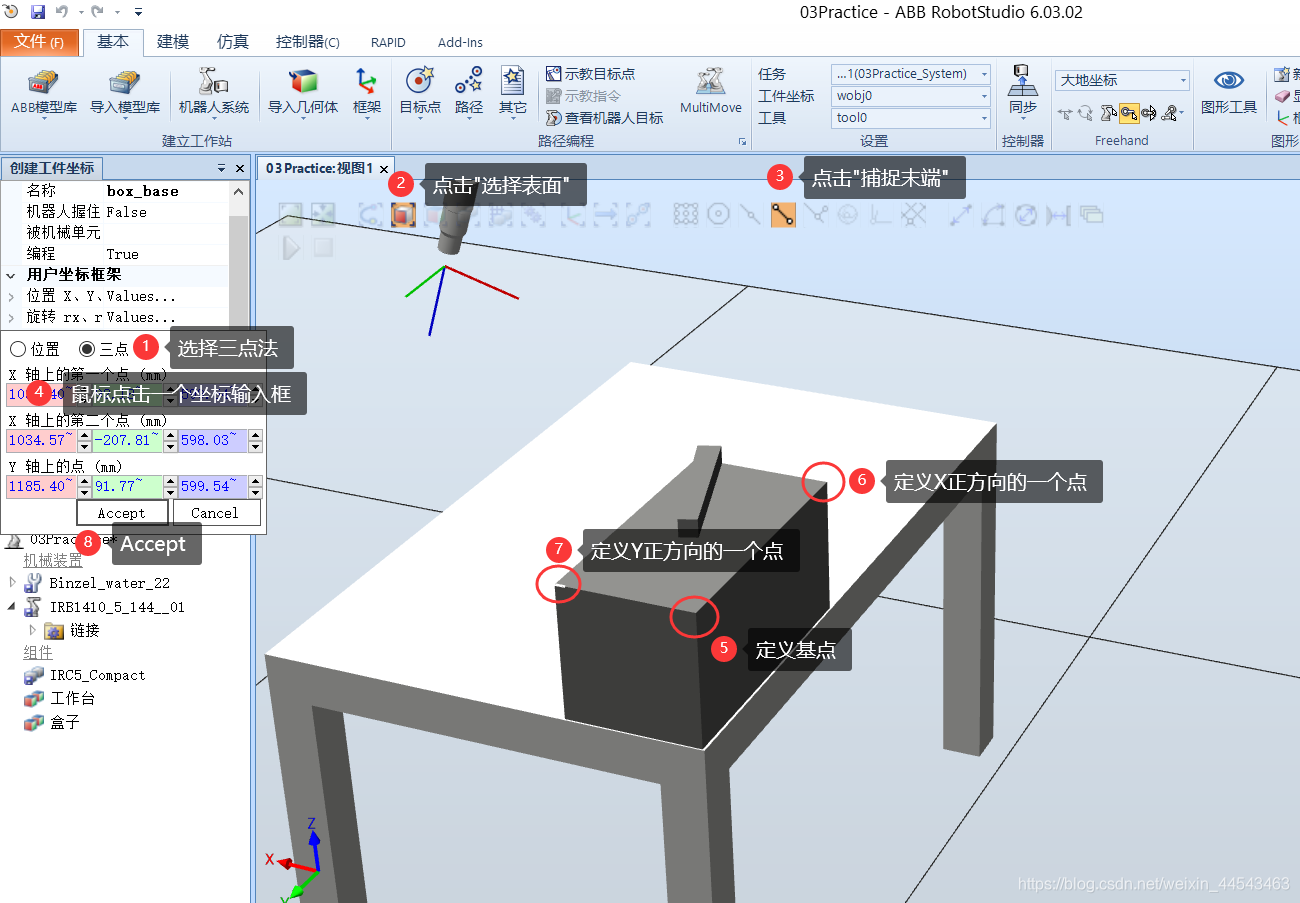
工件坐标的创建

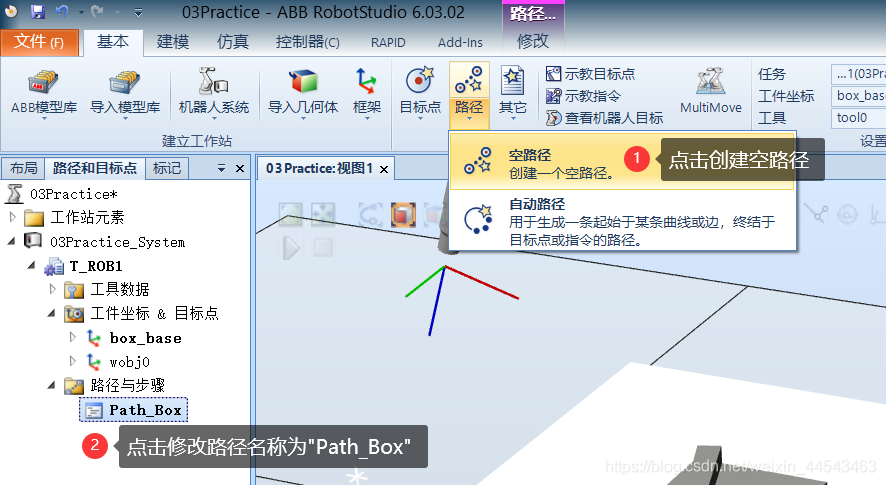
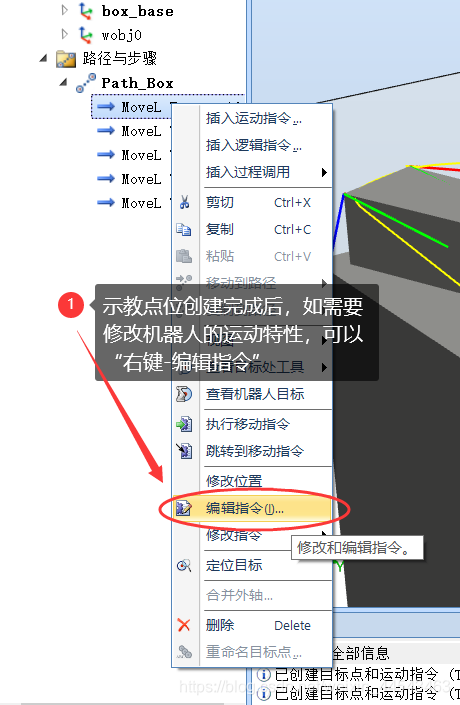
运行路径的创建
- 首先创建一个空路径
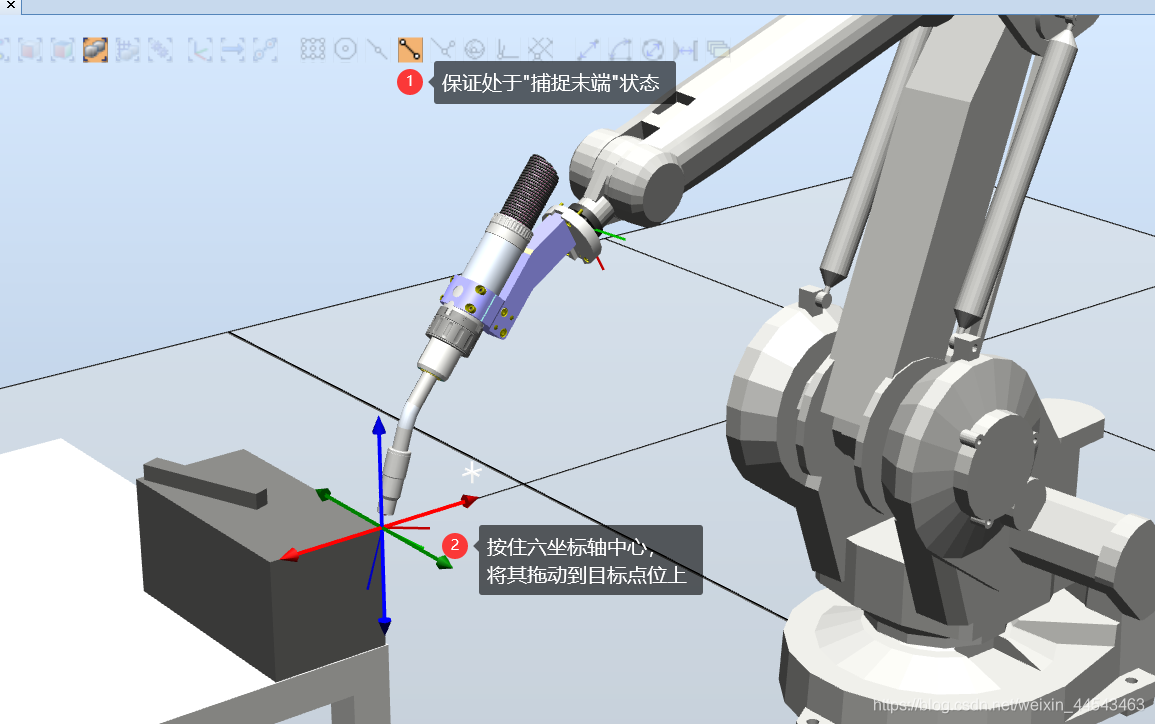
- 改变机器人的姿态,使工具移动到目标点进行示教。


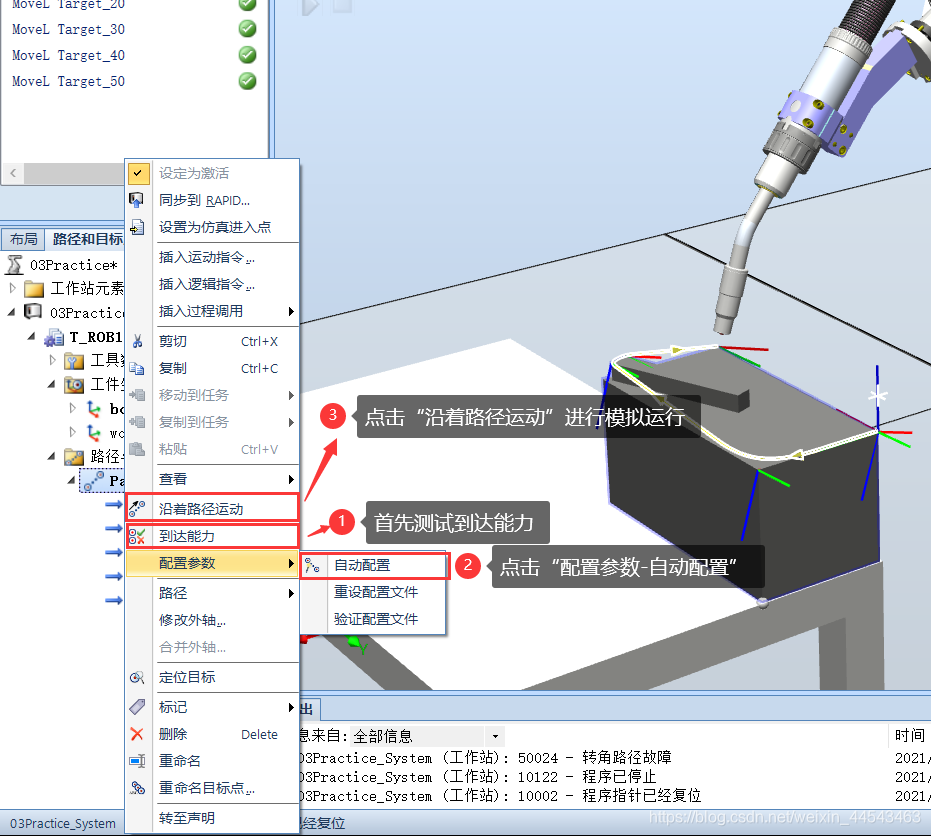
- 动作类型
- Joint:机器人以点到点的形式到此点(不走直线,各轴自由运动)
- Linear:机器人以直线运行方式从上一点运行到下一点
- Conc
- 禁用:机器人会精确到达此点
- 启用:机器人会依据Zone的参数,略过此点
- Speed:机器人的运动速度
- Zone:启用Conc时,机器人掠过目标点所经过圆弧轨迹的半径
- 测试到达能力并进行模拟运行
仿真与录像
- 将工作站同步到Rapid代码


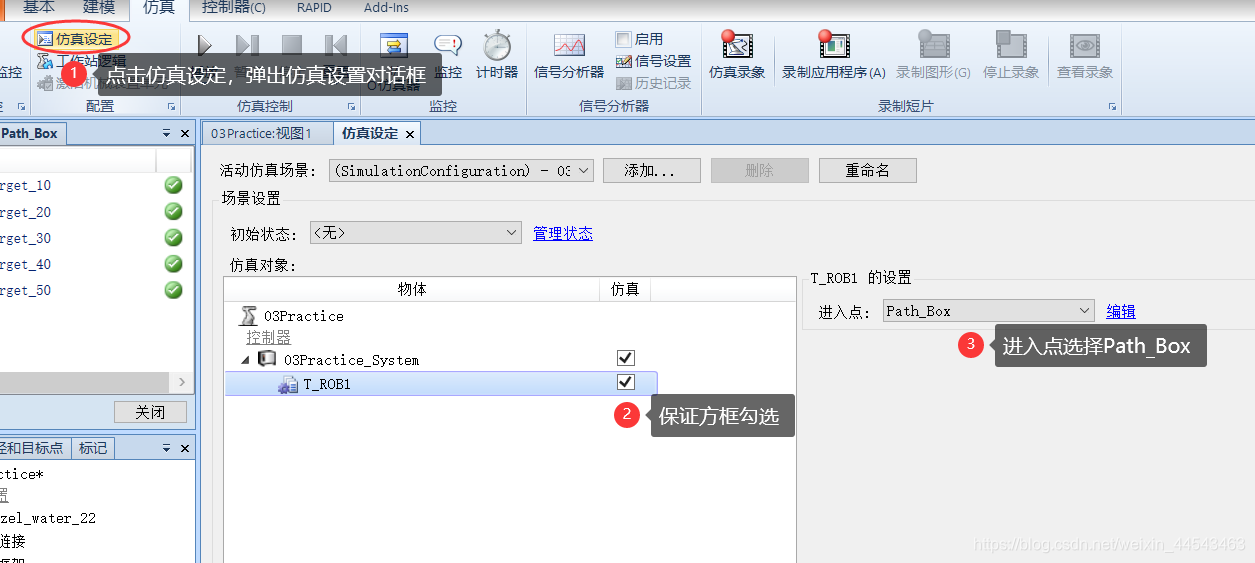
- 进行仿真设定
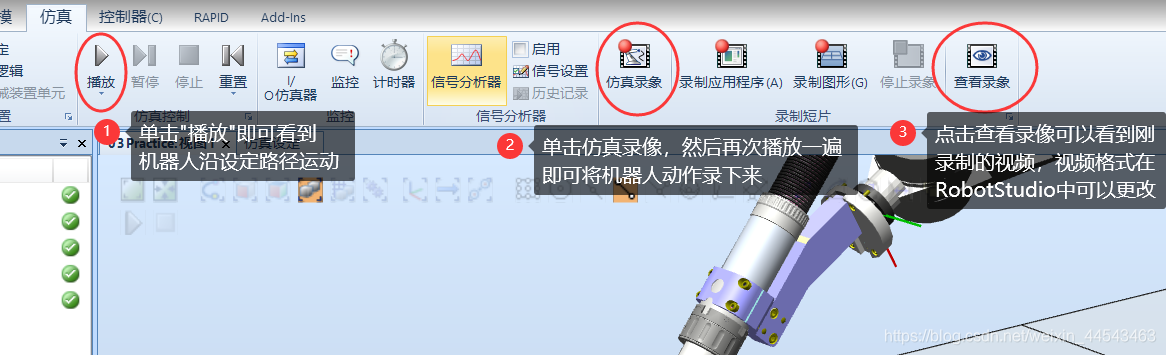
- 播放并录制保存仿真视频。(录制的视频默认保存在 我的电脑/视频 目录下)


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











