










船体坐标系介绍:
对于船舶在三维空间中的运动,通常采用两种国际通用的正交坐标系进行描述:大地坐标系,船体坐标系。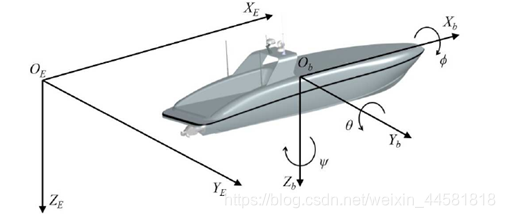
大地坐标系
任取一点OE 为坐标原点,在静止水平面中,XE轴正方向指向正北,YE轴正方向指向正东,ZE轴正方向垂直于水平面,并且指向地心。见上图
船舶在大地坐标系下位置及欧拉角
船舶位置η1= [x y z]T, 其中x, y, z 分别表示纵向、横向和垂向位移,
欧拉角η2= [ϕ θ ψ]T,其中ϕ,θ,ψ分别表示横摇角、纵摇角和艏角,
艏向角以正北为0 度,顺时针为正,逆时针为负,舵角以右舵为正。
船体坐标系
船舶的重心为坐标系原点Ob,Xb轴正方向为船艏方向,Yb轴正方向为船体右舷方向,Zb轴正方向为船体垂直向下方向。见上图
船舶在船体坐标系下线速度、角速度、受力和力矩
线速度为 v1=[u v ω]T,其中u ,v,ω分别表示纵向速度,横向速度和垂向速度,
角速度v2=[p q r]T,其中p ,q, r 分别表示横摇角速度、纵摇角速度和艏摇角速度,
推力 τ1=[X Y Z]T ,其中X,Y,Z分别表示船体坐标轴上所受的推力,
旋转力矩 τ1=[K M N]T ,其中K,M,N分别表示船体坐标轴方向上所受到的旋转力矩。
在介绍六个自由度前,我们先要区分下船舶的方向
① 船舶中纵面上船艏-船尾(前后)方向称纵向,用X来表示
② 船舶中纵面上左右舷(左右)方向称横向,用Y来表示
③ 船舶中纵面上的上甲板-船舱底(上下)方向称垂直方向,用Z来表示
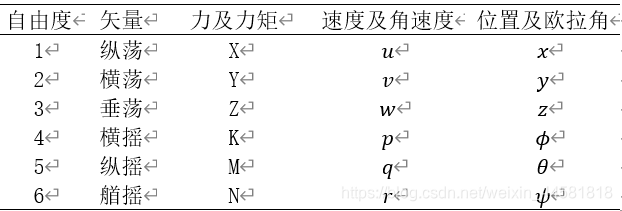
六个自由度分别是:
横荡
船舶左右方向的晃动称为横荡
纵荡
船舶前后方向的晃动称为纵荡
垂荡
船舶上下方向的晃动称为垂荡
横摇
船舶前后方向摇摆叫横摇
纵摇
船舶左右方向摇摆叫纵摇
艏摇
绕船体垂直轴的旋转振荡运动


















 4258
4258

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











