






首先说明:变换后的坐标=变换矩阵*变换前的坐标
具体内容可以看机器人学导论第二章
# 绕X轴旋转矩阵

解释如下

# 绕Y轴旋转矩阵
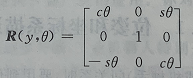
解释如下

# 绕Z轴旋转矩阵
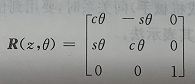
解释如下


首先说明:变换后的坐标=变换矩阵*变换前的坐标
具体内容可以看机器人学导论第二章
# 绕X轴旋转矩阵
解释如下
# 绕Y轴旋转矩阵
解释如下
# 绕Z轴旋转矩阵
解释如下
 697
7995
338
868
2202
697
7995
338
868
2202











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



























