







微分方程的建立
一般形式
根据力学、电学等物理学规律,得到输入和输出之间的数学表达式,即列处描述系统特性的微分方程。
一个
n
n
n阶连续时间系统可以用
n
n
n阶微分方程来描述,其一般形式为
y
(
n
)
(
t
)
+
a
n
−
1
y
n
−
1
(
t
)
+
⋅
⋅
⋅
+
a
1
y
′
(
t
)
+
a
0
y
(
t
)
=
b
m
x
(
m
)
(
t
)
+
b
m
−
1
x
m
−
1
(
t
)
+
⋅
⋅
⋅
+
b
1
x
′
(
t
)
+
b
0
x
(
t
)
y^{(n)}(t)+a_{n-1}y^{n-1}(t)+···+a_1y'(t)+a_0y(t)= \\b_mx(m)(t)+b_{m-1}x^{m-1}(t)+···+b_1x'(t)+b_0x(t)
y(n)(t)+an−1yn−1(t)+⋅⋅⋅+a1y′(t)+a0y(t)=bmx(m)(t)+bm−1xm−1(t)+⋅⋅⋅+b1x′(t)+b0x(t)
式中
y
(
t
)
y(t)
y(t)和
x
(
t
)
x(t)
x(t)是系统的响应和激励;
y
(
n
)
(
t
)
y^{(n)}(t)
y(n)(t)是
y
(
t
)
y(t)
y(t)的
n
n
n阶导数;
x
(
m
)
(
t
)
x^{(m)}(t)
x(m)(t)是
x
(
t
)
x(t)
x(t)的
m
m
m阶导数;
a
k
a_k
ak和
b
k
b_k
bk是各项系数。
LTI系统
对于线性时不变系统,即连续时间LTI系统,其组成系统的原件都是具有恒定参数值的线性元件,因此式中各参数为常数,所以它的数学模型就是一个线性常系数微分方程。
知道了LTI系统的模型类型,下面开始建立LTI系统的常系数微分方程。
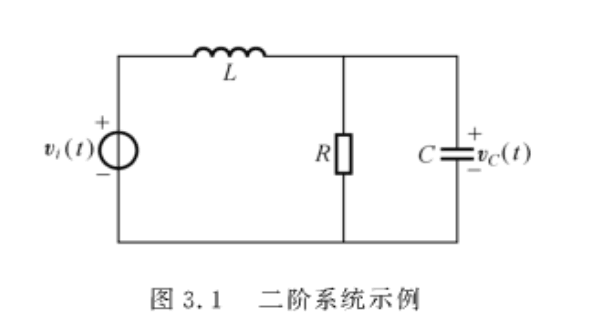
以下图电路为例。以信号源 v i ( t ) v_i(t) vi(t)为系统的激励信号,电容器两端的端电压 v c ( t ) v_c(t) vc(t)为系统响应。
根据KCL和KVL可得
v
i
(
t
)
=
v
L
(
t
)
+
v
C
(
t
)
i
L
(
t
)
=
i
R
(
t
)
+
i
c
(
t
)
v_i(t)=v_L(t)+v_C(t) \\i_L(t)=i_R(t)+i_c(t)
vi(t)=vL(t)+vC(t)iL(t)=iR(t)+ic(t)
式中
v
L
(
t
)
v_L(t)
vL(t)为电感器电压,
i
L
(
t
)
i_L(t)
iL(t)为通过电感的电流,
i
R
(
t
)
i_R(t)
iR(t)为通过电阻的电流,
i
c
(
t
)
i_c(t)
ic(t)为通过电容的电流。
各元件端电压与端电流之间关系为
i
C
(
t
)
=
C
d
v
c
(
t
)
d
t
i_C(t)=C\frac{dv_c(t)}{dt}
iC(t)=Cdtdvc(t)
根据各元件上电压与电流关系可得LTI系统的常系数微分方程。
v
c
′
′
(
t
)
+
1
R
C
v
c
′
(
t
)
+
1
L
C
v
c
(
t
)
=
1
L
C
v
i
(
t
)
v''_c(t)+\frac{1}{RC}v'_c(t)+\frac{1}{LC}v_c(t)=\frac{1}{LC}v_i(t)
vc′′(t)+RC1vc′(t)+LC1vc(t)=LC1vi(t)
为了求解该微分方程的解,通常还需要知道电路的初始条件
v
c
(
0
)
v_c(0)
vc(0)和
v
c
′
(
0
)
v'_c(0)
vc′(0)
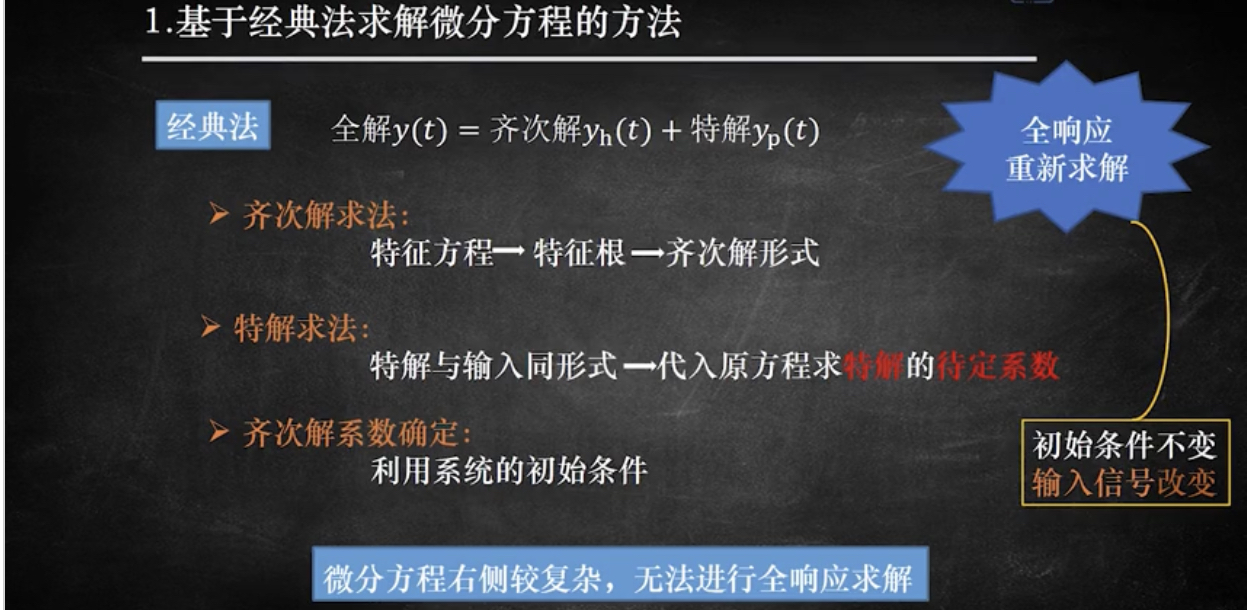
微分方程的经典法求解
系统的微分方程的解即系统的响应,系统的响应(解)可由两部分相加而成。一部分是微分方程的齐次方程的解,称为齐次解,记作
y
h
(
t
)
y^{h}(t)
yh(t);另一部分是原方程的任意一个解,称为特解,记作
y
∗
(
t
)
y^*(t)
y∗(t)。得完全解的形式如下
y
(
t
)
=
y
h
(
t
)
+
y
∗
(
t
)
y(t)= y^{h}(t)+y^*(t)
y(t)=yh(t)+y∗(t)
例题
齐次解的求法和高数的类似,直接看例题吧。
例题:
LTI系统的微分方程为
y
′
′
(
t
)
+
6
y
′
(
t
)
+
8
y
(
t
)
=
x
(
t
)
,
t
>
0
y''(t)+6y'(t)+8y(t)=x(t),t>0
y′′(t)+6y′(t)+8y(t)=x(t),t>0
初始条件
y
(
0
)
=
1
y(0)=1
y(0)=1,
y
′
(
0
)
=
2
y'(0)=2
y′(0)=2,输入信号
x
(
t
)
=
e
−
t
u
(
t
)
x(t)=e^{-t}u(t)
x(t)=e−tu(t),求它的全解。
齐次解的求法
解:
- 首先确定齐次解 y h ( t ) y^h(t) yh(t)的形式
y h ′ ′ ( t ) + 6 y h ′ ( t ) + 8 y h ( t ) = 0 y''_h(t)+6y'_h(t)+8y_h(t)=0 yh′′(t)+6yh′(t)+8yh(t)=0
- 然后写出它的特征方程(令 y h ′ ( t ) = s y_h'(t)=s yh′(t)=s)
s 2 + 6 s + 8 = 0 s^2+6s+8=0 s2+6s+8=0
- 求解得到特征方程的特征根
s 1 = − 2 , s 2 = − 4 s_1 = -2,s_2=-4 s1=−2,s2=−4
-
根据特征根的形式,判断出齐次解的形式
判断规则:
-
如果特征根为 N N N互不相同实根:齐次解形式如下
y ( h ) ( t ) = ∑ i = 1 N C i e s i t y^{(h)}(t)=\sum^N_{i=1}C_ie^{s_it} y(h)(t)=i=1∑NCiesit -
如果特征根中有L个重根,即 r 1 = r 2 = . . . = r L r_1=r_2=...=r_L r1=r2=...=rL,其余跟均为单根:齐次解为
y ( h ) ( t ) = ∑ i = 1 L C i t i − 1 e s i t + ∑ j = L + 1 N c j e s j t y^{(h)}(t)=\sum^L_{i=1}C_it^{i-1}e^{s_it}+\sum^N_{j=L+1}c_je^{s_jt} y(h)(t)=i=1∑LCiti−1esit+j=L+1∑Ncjesjt -
如果特征根为共轭负根, s 1 = α + j β s_1=\alpha+j\beta s1=α+jβ, s 2 = α − j β s_2=\alpha-j\beta s2=α−jβ:齐次解形式如下
y h ( t ) = e α [ A 1 c o s ( β t ) + A 2 s i n ( β t ) ] y^{h}(t)=e^\alpha[A_1cos(\beta t)+A_2sin(\beta t)] yh(t)=eα[A1cos(βt)+A2sin(βt)]
本题为第一种情况,得到它的齐次解为
y h ( t ) = C 1 e − 2 t + C 2 e − 4 t , t > 0 y_h(t)=C_1e^{-2t}+C_2e^{-4t},t>0 yh(t)=C1e−2t+C2e−4t,t>0
式中的 C 1 , C 2 C_1,C_2 C1,C2将在求得全解后由初始条件确定。 -
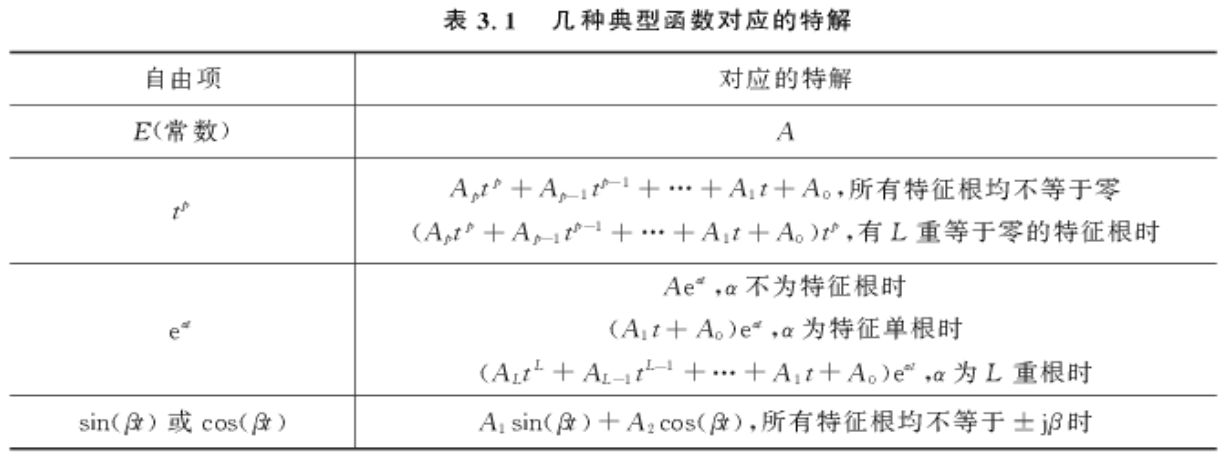
特解的求法
一般通过假定输出为与输入(右边的自由项)相同的一般函数形式来求得特解。
仍然以上题为例,求它的特解。
-
确定特解的形式
自由项的形式: e ( − t ) e^{(-t)} e(−t),且-1不是特征根。
推断出特解的形式为: P e − t u ( t ) , t > 0 Pe^{-t}u(t),t>0 Pe−tu(t),t>0
-
带入原方程,求出特解系数 P P P
( P e − t − 6 P e − t + 8 P e − t ) u ( t ) = e − t u ( t ) (Pe^{-t}-6Pe^{-t}+8Pe^{-t})u(t)=e^{-t}u(t) (Pe−t−6Pe−t+8Pe−t)u(t)=e−tu(t)
解得 p = 1 3 p=\frac{1}{3} p=31
解得特解为 e − t 3 \frac{e^{-t}}{3} 3e−t
全解的求法
全解=特解+齐次解
以上题为例:
- 写出特解形式
y ( t ) = e − t 3 + C 1 e − 2 t + C 2 e − 4 t y(t)=\frac{e^{-t}}{3}+C_1e^{-2t}+C_2e^{-4t} y(t)=3e−t+C1e−2t+C2e−4t
- 根据初始值求出参数值 C 1 C_1 C1, C 2 C_2 C2
y ( 0 ) = 1 / 3 + C 1 + C 2 = 1 y ′ ( 0 ) = − 2 C 1 − 4 C 2 − 1 / 3 = 2 y(0)=1/3+C_1+C_2=1 \\y'(0)=-2C_1-4C_2-1/3=2 y(0)=1/3+C1+C2=1y′(0)=−2C1−4C2−1/3=2
得到
C
1
=
5
/
2
C
2
=
−
11
/
6
C_1=5/2 \\C_2 = -11/6
C1=5/2C2=−11/6
- 写出最终表达式
y ( t ) = e − t 3 + 5 2 e − 2 t + − 11 6 e − 4 t y(t)=\frac{e^{-t}}{3}+\frac{5}{2}e^{-2t}+-\frac{11}{6}e^{-4t} y(t)=3e−t+25e−2t+−611e−4t
因为是因果系统,所以可以写为
y
(
t
)
=
(
e
−
t
3
+
5
2
e
−
2
t
+
−
11
6
e
−
4
t
)
u
(
t
)
y(t)=(\frac{e^{-t}}{3}+\frac{5}{2}e^{-2t}+-\frac{11}{6}e^{-4t})u(t)
y(t)=(3e−t+25e−2t+−611e−4t)u(t)
总结
总结如下
微分方程的基于零输入响应和零状态响应的求解方法
原理:
将响应分为1. 由激励信号 x ( t ) x(t) x(t)引起的零状态响应 y z s ( t ) y_{zs}(t) yzs(t);2. 由系统初始状态引起的零输入响应 y z i ( t ) y_{zi}(t) yzi(t)。
根据原理可以将响应分为:
- 零输入响应:没有外加激励信号的作用,只有起始状态(起始时刻系统储能的作用)所产生的响应,记作 y z s ( t ) y_{zs}(t) yzs(t)
- 零状态响应:不考虑起始时刻系统储能的作用(起始状态等于零),由系统外加的激励信号所产生的响应,记作 y z i ( t ) y_{zi}(t) yzi(t)
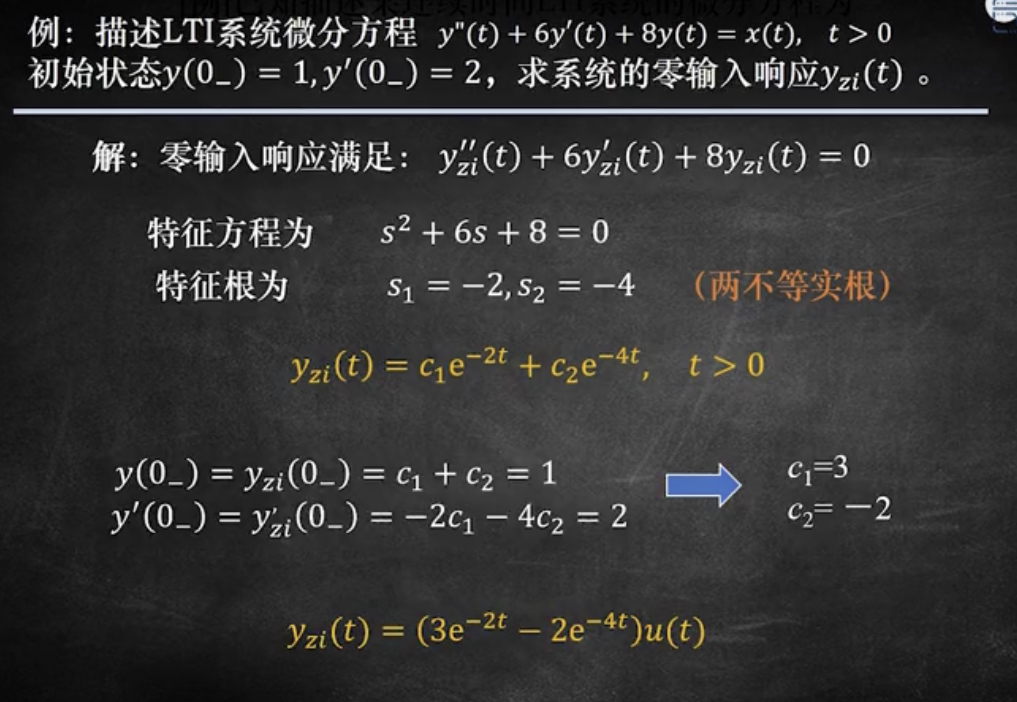
零输入响应求解方法
零输入响应求解:求微分方程的齐次解
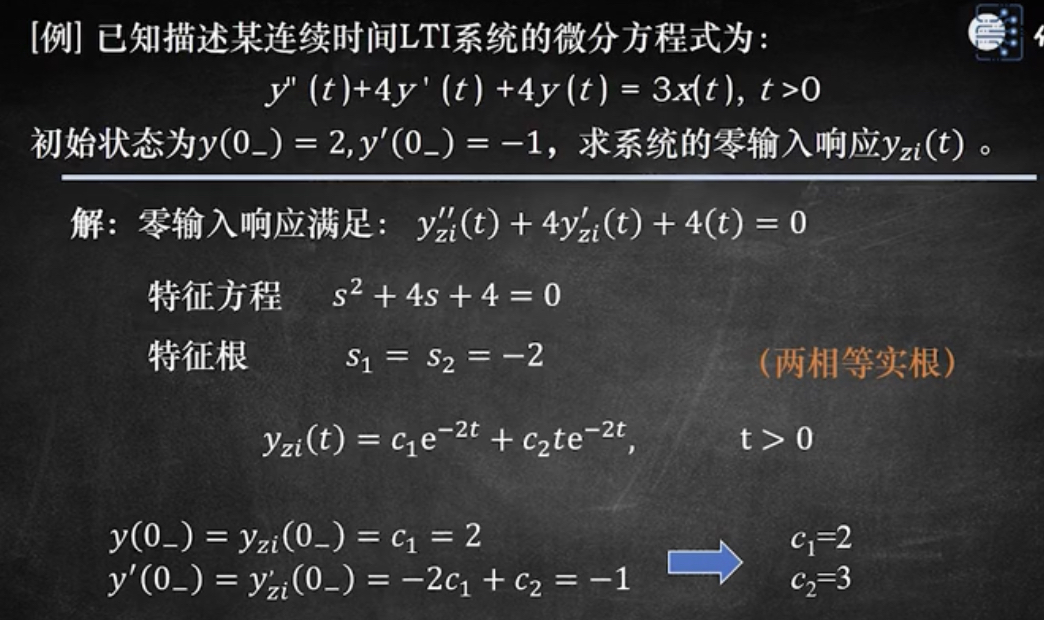
例题1
例题2
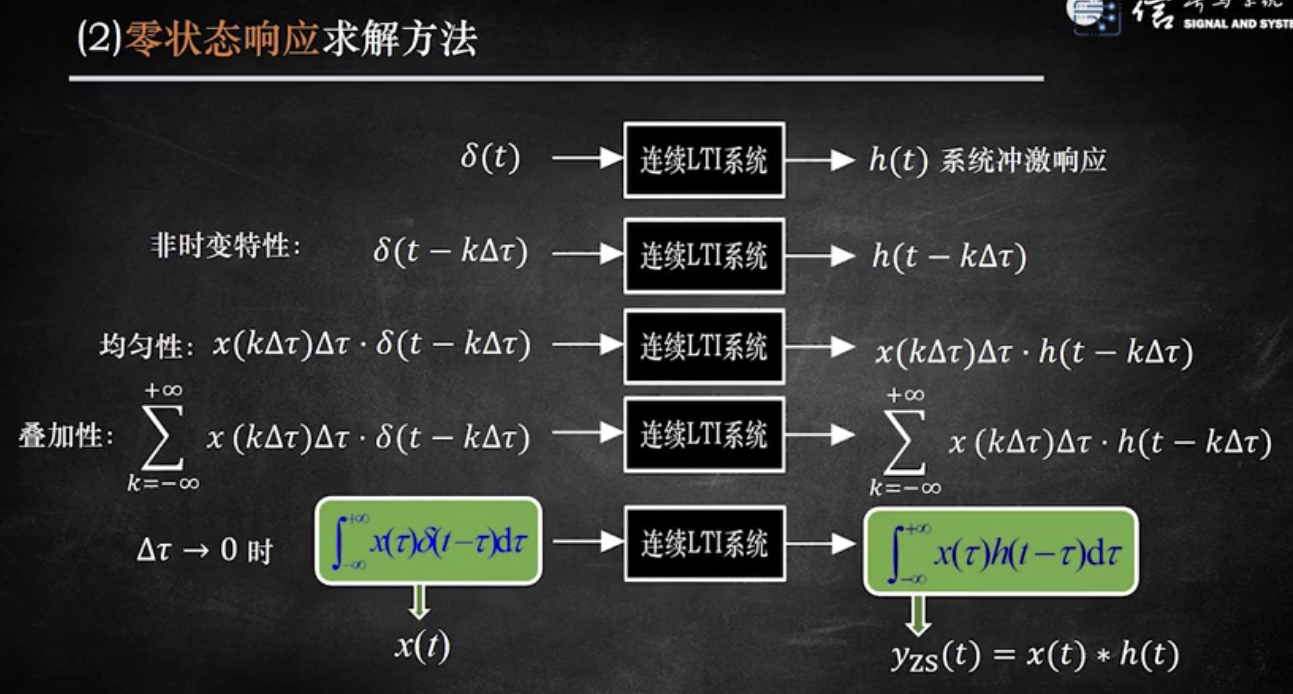
零状态响应的求解方法
输入为 x ( t ) x(t) x(t)的线性时不变系统的输出为 x ( t ) x(t) x(t)和 h ( t ) h(t) h(t)(系统冲激响应)的卷积
下一节介绍 h ( t ) h(t) h(t)的求解
全响应
零输入+零输出

















 1666
1666

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









