







系列文章目录
第一章 RTK差分定位应用
文章目录
前言
保持记录。
导航数据的接收与处理是为了给RTK差分定位提供数据,从而实现机器或无人机的厘米级定位精度。
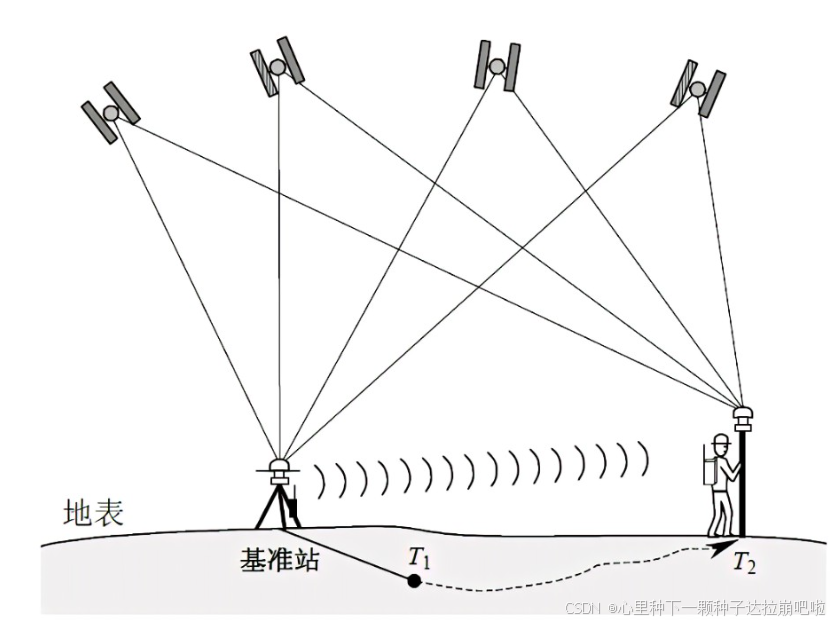
解释下:RTK即差分定位(把误差分离出去),在GPS的基础上,架设一个地面基站,地面基站获取卫星定位与真实位置(由于基站固定,所以位置是绝对的)对比,计算出GPS的定位误差,并通过GPRS(通过电台或运营商的数据网络以无线传送形式对差分数据进行传输)把当前误差发送给移动站,移动站会利用这个误差纠正(进行解算)从卫星获得的定位。
一、定位模块
UM982北斗定位板卡的作用是获取到机器人的实时位置信息发送给MCU,也就是定位。
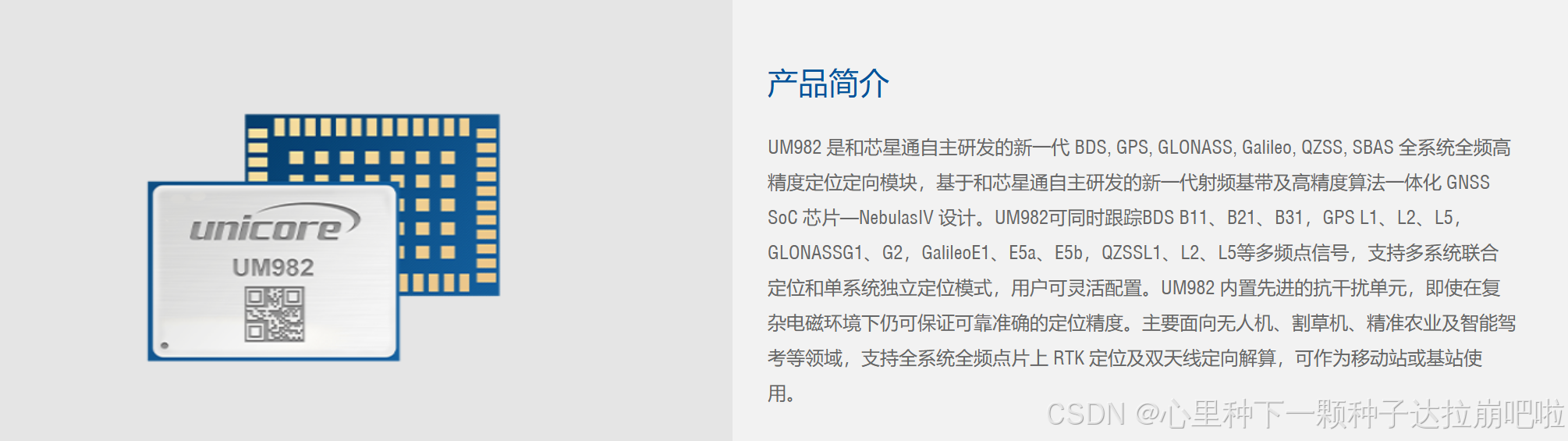
选用使用UM982北斗定位板卡作为定位模块,该模块集成RTK定位技术(一般5V供电),该芯片内置先进的抗干扰单元,即使在复杂电磁环境下仍可保证可靠准确的定位精度。主要面向无人机、割草机、精准农业及智能驾考等领域,支持全系统全频点片上 RTK 定位及双天线定向解算,可作为移动站或基站使用。
关于UM982如何获取机器人位置信息又包括着:基站RTCM信息的获取、UM982接收RTCM信息、RTK定位解算。接下来到主要内容。
二、获取机器人位置信息
1.基站RTCM信息的获取
基站RTK会通过在已知精确位置上安装高精度的GNSS接收器,提供高精度定位服务。在基站,将会根据接收到的卫星信号与已知的精确位置进行计算,得出的各种误差修正值将通过无线电波传输到用户设备,用户设备就可以使用这些误差修正值校正自己的GNSS观测数据。
具体通过使用软件Strsvr获取网络基站RTCM信息。
2.UM982接收基站RTCM信息
UM982将板载,所以基站信息将通过一个通信模块进行长距离无线通信,选择一款无线数传模块即可。
UM982北斗定位板是和芯星通设计以方便UM982定位模块的使用,通过USB转串口可以连接到电脑上,通过串口发送指令对该模块进行模式配置以及RTCM消息(差分系统在全球范围使用的标准协议)输出的配置。
3.RTK定位解算
关于UM982如何进行RTK解算,这里不再解释。
三、基站与流动站配置
1.基站配置
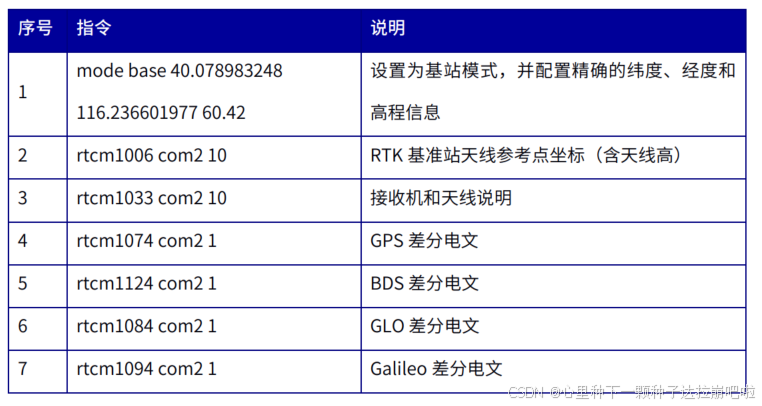
1)在已知基站精确位置时,可配置如下:

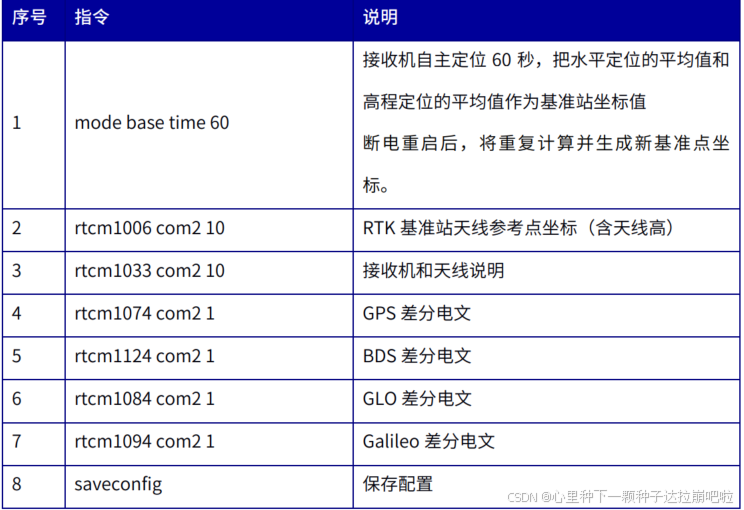
2)在不知基站的精确坐标时:
自主优化设置基准站:即在将架设基准站的点没有精确坐标时,可设置接收机在安装点上进行一定时间的收敛和自主优化,取此段时间内的平均值设置为基准站的坐标。指令如下表自主优化设置基站模式。
2.流动站配置
RTK 流动站(移动站)是实时接收基准站的差分改正数信息,同时接收卫星信号进行RTK 定位解算,实现 RTK 高精度定位。接收机可自适应识别 RTCM 数据输入的端口和格式。RTK 流动站的常用指令为:
四、GPS数据的接收
首先需要通过UM982接收GPS数据,再将所接收到的数据坐标与基站的固定坐标进行RTK解析,然而GPS数据通常包含着较多的内容,需要使用不同的命令来接收需要的数据,有效的数据无非就是定位数据、经纬度数据、可见卫星数和参与定位卫星数。
1.接收GPS数据
通过UM982接收到GPS数据后,将所接收到的数据坐标和固定基站的固定座标进行差分处理,这就是RTK差分定位技术,咱们就是一个差分的动作!
GPGGA:GPS定位信息(输出定位的时间、位置与相关的定位数据)
GPGSA:当前卫星信息(输出接收机工作方式,参与定位的卫星以及DOP值等信息)
GPGSV:可见卫星信息(输出可见卫星数量,卫星编号、仰角、方位角和信噪比)
当然,获取这些有效数据后,需要对其进行判断确保数据无误
2.确保数据无误
1)卫星数判断:参与定位的卫星数量大于或者等于六颗,系统才会认为所获得的数据是有效的;
2)数据标志位验证:数据被认为有效后,还需要对数据的标志位进行二次验证。
如果数据有效且无误,将会存储在寄存器中,以便以后使用。通过这两个步骤,能够确保使用的GPS数据既准确又可靠,从而提高整个系统的性能和效率,也避免因数据不准而对后续任务的执行造成影响。
五、GPS数据的处理
1.经纬度数据转换
将经纬度数据转换为厘米单位,便于计算实际距离。涉及到GIS地理信息系统中的坐标转换算法,本项目使用的是QGIS-开源GIS软件。
2.计算距离和航向偏差
本项目需要计算当前距离与目标距离的直线距离,以及当前航向与指向目标航向的偏差。所以需要一些数学运算:经纬度像弧度的转换。
为什么需要将经纬度转为弧度,是因为三角函数通常在弧度制下运算,而经纬度数据通常以度为单位。转换的公式:弧度=度*pai/180.
机器人上具有两只车载天线,分别位于头的两侧,通过天线的弧度差可计算出它当前的实际航向,并与目标航向对比得到航向偏差。后续根据航向偏差设置车子在行进过程中航向调节,还是原地停止调整与目标一致再行驶。
总结
如上


















 627
627

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









