







目录
1 博客内容
博客内容基于STM32F103 RET6芯片,使用系统通用定时器实现占空比输出。TIM3四个通道对应的PA6、PA7、PB0、PB1引脚电压输出。程序使用结果使用电压表测试,主要参考B站:正点原子STM32-M3入门初级篇 。
2 PWM原理
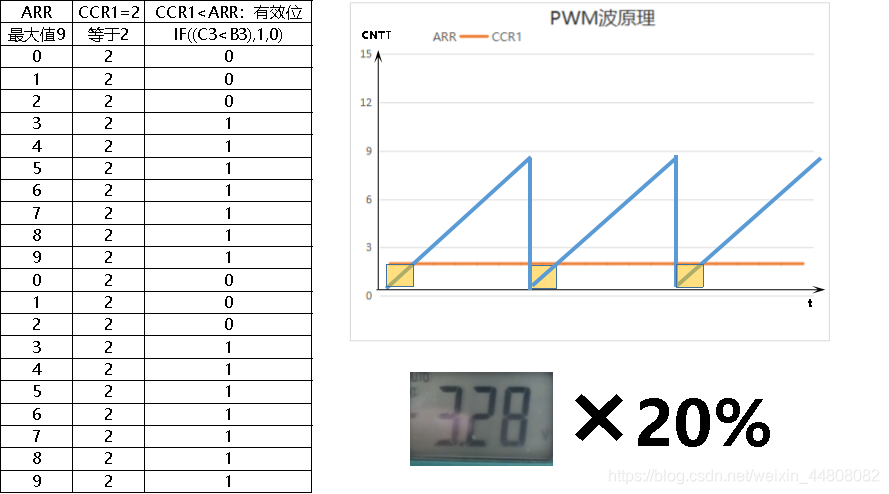
(1)分频系数71,系统主频72MHz,计算系统计数频率为1MHz,计数运行1次时间是0.000 001s;
(2)ARR向上计数模式从0累加到9共10个数,需要0.000 01s,PWM频率100kHz;
(3)PWM外设初始化选择PMW1模式,即比较输出低,ARR低于CCR1,输出有效电平,即2个有效电平,8个无效电平(空)。输出有效值为20%。而一个CNT计算周期为0.000 1s;
(4)PWM外设初始化TTM比较输出极性高,高电平输出,即PA*输出电压为0.656V(注:GPIO端口高电平一般输出3.3V,电压表读数3.28V)。
3 主程序(Main.c)
//================================================
// 名称: Main.c
// 作者: Morven_X
// 版本: 1.1
// 编制: 2021/01/15 23:10
// 更新: 2021/01/30 22:45
// 功能: 基于STM32F103 RET6芯片,使用通用定时器3通道1/2/3/4输出PWM并测试引脚电压
// 简介: 更新内容增加JTAG禁用,避免带来的输出引脚电压错乱问题(Keil 5.28)
// Email: morven_xie@163.com
//================================================
# include "stm32f10x.h"
# include "LED1.h"
#include "Delay.h"
#include "PWM.h"
int main(void)
{
LED_Init();
Delay_Init();
JTAG_Init();
PWM_Init();
while(1)
{
JTAG_ENable(1);
GPIO_SetBits(GPIOC, GPIO_Pin_3); //设置高电平输出
TIM_SetCompare1(TIM3,200); //设置TIM3 CH1占空比输出
TIM_SetCompare2(TIM3,400); //设置TIM3 CH2占空比输出
TIM_SetCompare3(TIM3,600); //设置TIM3 CH3占空比输出 主板引脚PB0
TIM_SetCompare4(TIM3,800); //设置TIM3 CH4占空比输出 主板引脚PB1
}
}
4 PWM文件(PWM.h)
# ifndef _PWM_H
# define _PWM_H
# include "stm32f10x.h"
#define TIM3_Reload_Num_ARR 999 //自动重装载寄存器值
#define TIM3_Frequency_Divide_PSC 71 //TIM时钟预分频值
void PWM_Init(void); //TIM3_PWM输出初始化
void JTAG_Init(void);
void JTAG_ENable(char JTAG_STA);
#endif
5 PWM程序(PWM.c)
# include "PWM.h"
void JTAG_Init(void)
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //先开启开启AFIO复用时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能GPIOA外设时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //使能GPIOB外设时钟
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);//关闭JTAG,保留SWD(同时关闭SWD,芯片作废)
}
void JTAG_ENable(char JTAG_STA)
{
if(JTAG_STA==0)
{
AFIO->MAPR=0X00000000;
}
else
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //先开启开启AFIO复用时钟
AFIO->MAPR=0X02000000; //JTAG做普通IO口,但SWD可用
}
return;
}
void PWM_Init(void)
{
/* 初始化结构体定义 */
GPIO_InitTypeDef GPIO_InitStructure; //GPIO初始化结构体
TIM_TimeBaseInitTypeDef TIM_TimeBaseSrtructure; //TIM时间基数初始化结构体
TIM_OCInitTypeDef TIM_OCInitStructure; //TIM输出比较功能结构体
/* 时钟线(RCC)设置 */
//RCC 为 Reset and Clock Control 时钟配置寄存器
//APB2 外设复位寄存器(RCC_APB2_RSTR,32位,用低16为位),偏移地址OxOC,复位地址 0x0000 0000。位2用于10端口A复位(IOPARST),位0用于AFIO端口A复位(AFIORST)
//APB1 外设复位寄存器(RCC_APB1_RSTR,32位,用全32为位),偏移地址0x10,复位地址 0x0000 0000。位1用于定时器3复位(TIM3RST)
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); //使能GPIOA外设时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE); //使能GPIOB外设时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); //重映射需开启AFIO时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); //使能TIM3时钟
/* 端口(GPIO)设置 */
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_6 | GPIO_Pin_7; //PA6=T3 Ch1,PA7=T3 Ch2
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_10MHz; //速度 10MHz
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化 GPIOA
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0 |GPIO_Pin_1; //PB0=T3 Ch3,PB1=T3 Ch4
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_10MHz; //速度 10MHz
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出
GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化 GPIOB
/* TIM时间基数初始化 */
TIM_TimeBaseSrtructure.TIM_Period= TIM3_Reload_Num_ARR; //计数器 TIMx_CNT计数 从0累加到ARR次后溢出,设置自动重装载值
TIM_TimeBaseSrtructure.TIM_Prescaler=TIM3_Frequency_Divide_PSC; //设置预分频系数 PSC
TIM_TimeBaseSrtructure.TIM_ClockDivision=0; //采用时钟分割,见库函数。TIM_Clock_Division_CKD定义,查手册 00:Tdts=Tck_int:01:Tdts=2*Tck_int(2分频)
TIM_TimeBaseSrtructure.TIM_CounterMode=TIM_CounterMode_Up; //TIM 向上计数模式溢出
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseSrtructure); //初始化TIM3的时钟
/* TIM外设初始化 */
TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1; //选择定时器模式:TIM 脉冲宽度调制模式1,模式1为比较低输出。
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse =(TIM3_Reload_Num_ARR+1)*0.5; //比较输出脉冲宽度,设置占空比,即CCR
TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM3,&TIM_OCInitStructure); //初始化TIM3 CH1的时钟,下同
TIM_OC2Init(TIM3,&TIM_OCInitStructure);
TIM_OC3Init(TIM3,&TIM_OCInitStructure);
TIM_OC4Init(TIM3,&TIM_OCInitStructure);
/* 初始化CH1 */
TIM_OC1PreloadConfig(TIM3,TIM_OCPreload_Enable); //CH1 预装载使能,功能在ARR和CCR1改变时,等他们计数完一个周期再修改
TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable); //CH2 预装载使能
TIM_OC3PreloadConfig(TIM3,TIM_OCPreload_Enable); //CH3 预装载使能
TIM_OC4PreloadConfig(TIM3,TIM_OCPreload_Enable); //CH4 预装载使能
TIM_ARRPreloadConfig(TIM3,ENABLE); //使能 TIMx在ARR上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能 TIM3
// NVIC_PriorityGroupConfig(NVIC_PriorityGroup_0); //设定中断优先级分组0
}
6 程序运行结果
6.1 PWM目标状态:
| PA6 | PA7 | PB0 | PB1 |
|---|---|---|---|
| 20%占空比:0.66V | 40%占空比:1.33V | 60%占空比:1.98V | 80%占空比:2.64V |
6.2 PWM输出状态
Debug Analyzer模式调试结果:

引脚实测电压:

对比电压数据发现PA6和PA7引脚输出结果互调,PB0和PB1引脚输出结果互调,输出与目标不一致。
20210130更新版本,增加JTAG初始化,输出与目标一致。
7 官方帮助文件校验
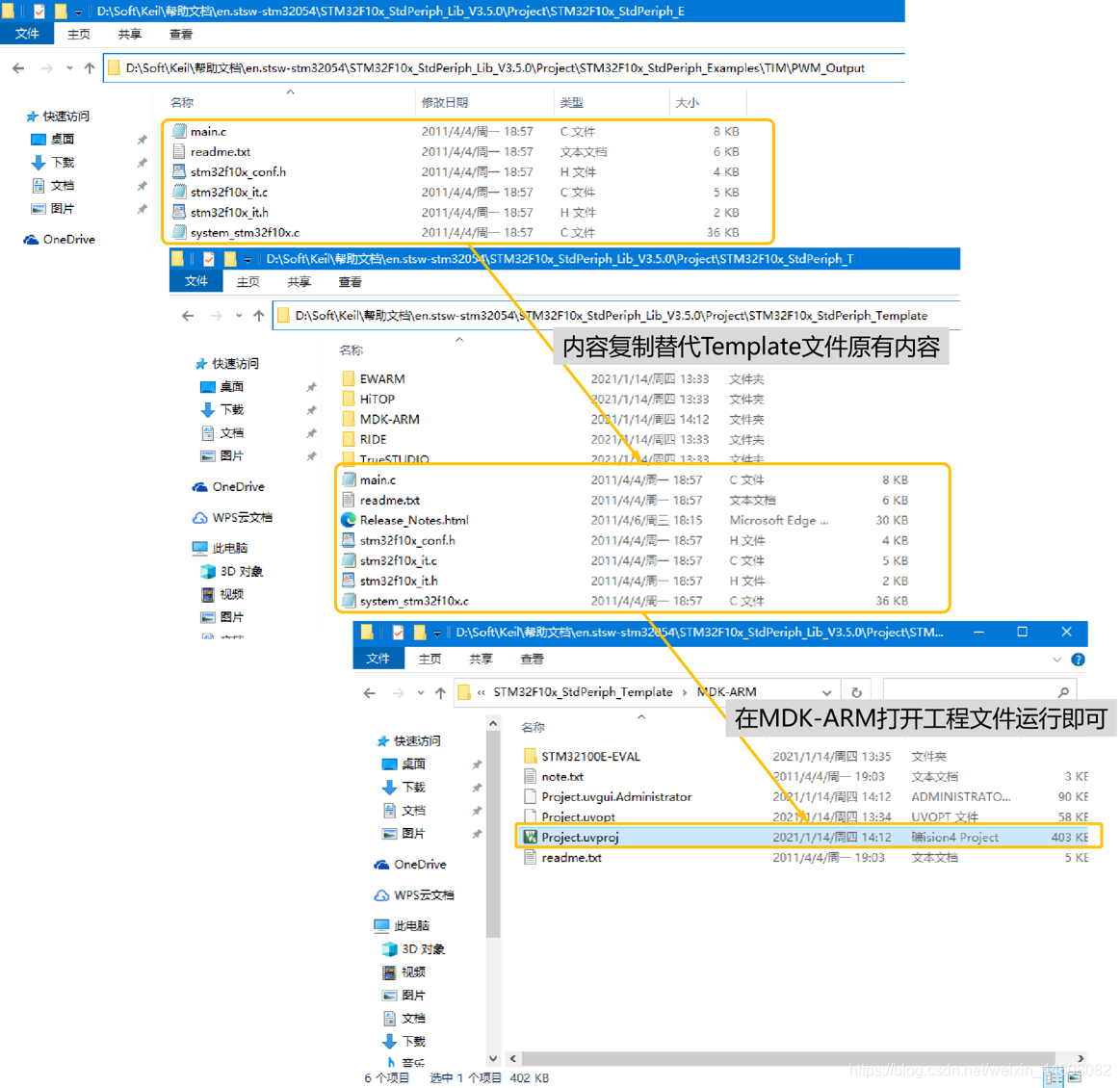
7.1 官方标准外设库下载及使用
官方标准外设库,这里称为帮助文件,ST意法半导体:STM32F10x标准外设库官方下载地址 ,使用方法如下:
7.2 PWM输出新程序及结果
调用官方程序,其功能与我写的代码一致,TIM3 Channel1 (PA6)= 50%、TIM3 Channel2 (PA7) = 37.5%、 TIM3 Channel3(PB0)= 25%、TIM3 Channel4(PB1) = 12.5%。
/**
******************************************************************************
* @file TIM/PWM_Output/main.c
* @author MCD Application Team
* @version V3.5.0
* @date 08-April-2011
* @brief Main program body
******************************************************************************
* @attention
*
* THE PRESENT FIRMWARE WHICH IS FOR GUIDANCE ONLY AIMS AT PROVIDING CUSTOMERS
* WITH CODING INFORMATION REGARDING THEIR PRODUCTS IN ORDER FOR THEM TO SAVE
* TIME. AS A RESULT, STMICROELECTRONICS SHALL NOT BE HELD LIABLE FOR ANY
* DIRECT, INDIRECT OR CONSEQUENTIAL DAMAGES WITH RESPECT TO ANY CLAIMS ARISING
* FROM THE CONTENT OF SUCH FIRMWARE AND/OR THE USE MADE BY CUSTOMERS OF THE
* CODING INFORMATION CONTAINED HEREIN IN CONNECTION WITH THEIR PRODUCTS.
*
* <h2><center>© COPYRIGHT 2011 STMicroelectronics</center></h2>
******************************************************************************
*/
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x.h"
/** @addtogroup STM32F10x_StdPeriph_Examples
* @{
*/
/** @addtogroup TIM_PWM_Output
* @{
*/
/* Private typedef -----------------------------------------------------------*/
/* Private define ------------------------------------------------------------*/
/* Private macro -------------------------------------------------------------*/
/* Private variables ---------------------------------------------------------*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
uint16_t CCR1_Val = 333;
uint16_t CCR2_Val = 249;
uint16_t CCR3_Val = 166;
uint16_t CCR4_Val = 83;
uint16_t PrescalerValue = 0;
/* Private function prototypes -----------------------------------------------*/
void RCC_Configuration(void);
void GPIO_Configuration(void);
/* Private functions ---------------------------------------------------------*/
/**
* @brief Main program
* @param None
* @retval None
*/
int main(void)
{
/*!< At this stage the microcontroller clock setting is already configured,
this is done through SystemInit() function which is called from startup
file (startup_stm32f10x_xx.s) before to branch to application main.
To reconfigure the default setting of SystemInit() function, refer to
system_stm32f10x.c file
*/
/* System Clocks Configuration */
RCC_Configuration();
/* GPIO Configuration */
GPIO_Configuration();
/* -----------------------------------------------------------------------
TIM3 Configuration: generate 4 PWM signals with 4 different duty cycles:
The TIM3CLK frequency is set to SystemCoreClock (Hz), to get TIM3 counter
clock at 24 MHz the Prescaler is computed as following:
- Prescaler = (TIM3CLK / TIM3 counter clock) - 1
SystemCoreClock is set to 72 MHz for Low-density, Medium-density, High-density
and Connectivity line devices and to 24 MHz for Low-Density Value line and
Medium-Density Value line devices
The TIM3 is running at 36 KHz: TIM3 Frequency = TIM3 counter clock/(ARR + 1)
= 24 MHz / 666 = 36 KHz
TIM3 Channel1 duty cycle = (TIM3_CCR1/ TIM3_ARR)* 100 = 50%
TIM3 Channel2 duty cycle = (TIM3_CCR2/ TIM3_ARR)* 100 = 37.5%
TIM3 Channel3 duty cycle = (TIM3_CCR3/ TIM3_ARR)* 100 = 25%
TIM3 Channel4 duty cycle = (TIM3_CCR4/ TIM3_ARR)* 100 = 12.5%
----------------------------------------------------------------------- */
/* Compute the prescaler value */
PrescalerValue = (uint16_t) (SystemCoreClock / 24000000) - 1;
/* Time base configuration */
TIM_TimeBaseStructure.TIM_Period = 665;
TIM_TimeBaseStructure.TIM_Prescaler = PrescalerValue;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
/* PWM1 Mode configuration: Channel1 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
/* PWM1 Mode configuration: Channel2 */
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR2_Val;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
/* PWM1 Mode configuration: Channel3 */
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR3_Val;
TIM_OC3Init(TIM3, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);
/* PWM1 Mode configuration: Channel4 */
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR4_Val;
TIM_OC4Init(TIM3, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3, ENABLE);
/* TIM3 enable counter */
TIM_Cmd(TIM3, ENABLE);
while (1)
{}
}
/**
* @brief Configures the different system clocks.
* @param None
* @retval None
*/
void RCC_Configuration(void)
{
/* TIM3 clock enable */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
/* GPIOA and GPIOB clock enable */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB |
RCC_APB2Periph_GPIOC | RCC_APB2Periph_AFIO, ENABLE);
}
/**
* @brief Configure the TIM3 Ouput Channels.
* @param None
* @retval None
*/
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
#ifdef STM32F10X_CL
/*GPIOB Configuration: TIM3 channel1, 2, 3 and 4 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7 | GPIO_Pin_8 | GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_PinRemapConfig(GPIO_FullRemap_TIM3, ENABLE);
#else
/* GPIOA Configuration:TIM3 Channel1, 2, 3 and 4 as alternate function push-pull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;
GPIO_Init(GPIOB, &GPIO_InitStructure);
#endif
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
while (1)
{}
}
#endif
/**
* @}
*/
/**
* @}
*/
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
官方程序结果PA6和PA7引脚输出结果互调,PB0和PB1引脚输出结果互调,同样输出与目标不一致。不纠结于程序,判断程序的写法没有问题(排查为JTAG初始化问题,已更新)。

















 2485
2485

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









