






 本文详细介绍了如何将Robot_localization中的Turtle Odometry和Positioning System从ROS1移植到ROS2,并提供了编译和运行步骤,适合理解和实践机器人的定位与数据融合。
本文详细介绍了如何将Robot_localization中的Turtle Odometry和Positioning System从ROS1移植到ROS2,并提供了编译和运行步骤,适合理解和实践机器人的定位与数据融合。
1、引言
Robot_localization是一个ROS的包,基于卡尔曼滤波,对多种传感器进行数据融合,进而完成机器人的定位。如果你有相关应用场景,那么该包可以大大降低工作量与工作难度。该包的使用不是那么复杂,但网上相关的资料却较少。如下链接,是一个基于ROS1的教程,较为清晰直接的介绍了该包的具体作用与如何使用。然而在我的工作中,采用的是ROS2,因此我将该教程的代码移植到了ROS2中,同时希望可以帮助更多的人。因此该文章主要是移植后的ROS2代码,具体的教程请参考链接。
2、准备工作
Github源码链接
在Github上,根据使用的ROS版本,下载相应的源码,并放在自己工作目录的src文件夹下,并进行编译。
第一次大概率由于没有安装相关的包,而编译报错,根据相应错误提示,安装相关的包即可。
完成编译后,即可以进行教程代码的编写。
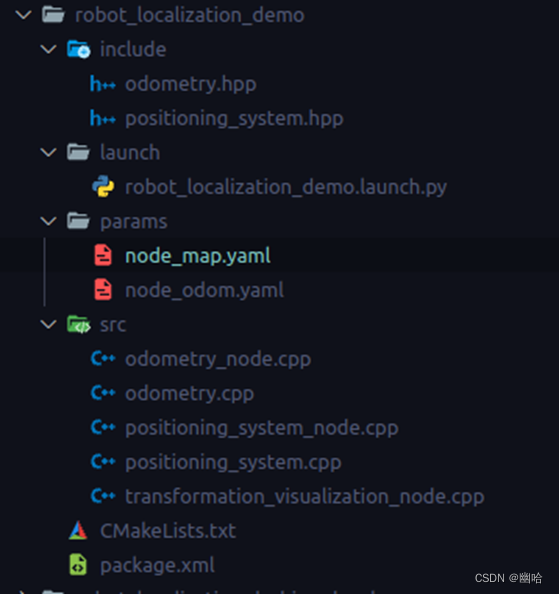
3、移植ROS2后的教程代码
代码目录如下,源码按顺序给出
//odometry.hpp
#ifndef __robot_localization_demo__odometry__
#define __robot_localization_demo__odometry__
#include <random>
#include "rclcpp/rclcpp.hpp"
#include "turtlesim/msg/pose.hpp"
#include <geometry_msgs/msg/twist_with_covariance_stamped.hpp>
class TurtleOdometry: public rclcpp::Node {
public:
TurtleOdometry( double frequency, double error_vx_systematic, double error_vx_random,
double error_wz_systematic, double error_wz_random, bool visualize=false);
~TurtleOdometry();
void spin();
private:
double frequency_;
std::default_random_engine random_generator_;
std::normal_distribution<double> random_distribution_vx_;
std::normal_distribution<double> random_distribution_wz_;
unsigned frame_sequence_;
bool visualize_;
std::string visualization_turtle_name_;
rclcpp::callback_group::CallbackGroup::SharedPtr client_cb_group_;
rclcpp::callback_group::CallbackGroup::SharedPtr other_cb_group_;
rclcpp::Subscription<turtlesim::msg::Pose>::SharedPtr turtle_pose_subscriber_;
rclcpp::Publisher<geometry_msgs::msg::TwistWithCovarianceStamped>::SharedPtr turtle_twist_publisher_;
rclcpp::Time cached_pose_timestamp_;
turtlesim::msg::Pose cached_pose_;
void turtlePoseCallback(const turtlesim::msg::Pose::SharedPtr message);
inline bool isVisualizationRequested() { return visualize_; };
inline bool isVisualizationTurtleAvailable() { return visualization_turtle_name_ != ""; };
void spawnAndConfigureVisualizationTurtle(const turtlesim::msg::Pose & initial_pose);
void moveVisualizationTurtle(const turtlesim::msg::Pose & measurement);
rclcpp::TimerBase::SharedPtr timer_;
};
#endif
//positioning_system.hpp
#ifndef __robot_localization_demo__positioning_system__
#define __robot_localization_demo__positioning_system__
#include <random>
#include "rclcpp/rclcpp.hpp"
#include "turtlesim/msg/pose.hpp"
#include "geometry_msgs/msg/pose_with_covariance_stamped.hpp"
class TurtlePositioningSystem: public rclcpp::Node {
public:
TurtlePositioningSystem(double frequency, double error_x_systematic,
double error_x_random, double error_y_systematic, double error_y_random, double error_yaw_systematic,
double error_yaw_random, bool visualize=false);
~TurtlePositioningSystem();
void spin();
private:
double frequency_;
std::default_random_engine random_generator_;
std::normal_distribution<double> random_distribution_x_;
std::normal_distribution<double> random_distribution_y_;
std::normal_distribution<double> random_distribution_yaw_;
unsigned frame_sequence_;
bool visualize_;
std::string visualization_turtle_name_;
rclcpp::callback_group::CallbackGroup::SharedPtr client_cb_group_;
rclcpp::callback_group::CallbackGroup::SharedPtr other_cb_group_;
rclcpp::Subscription<turtlesim::msg::Pose>::SharedPtr turtle_pose_subscriber_;
rclcpp::Publisher<geometry_msgs::msg::PoseWithCovarianceStamped>::SharedPtr turtle_pose_publisher_;
rclcpp::Time cached_pose_timestamp_;
turtlesim::msg::Pose cached_pose_;
void turtlePoseCallback(const turtlesim::msg::Pose::SharedPtr message);
inline bool isVisualizationRequested() { return visualize_; };
inline bool isVisualizationTurtleAvailable() { return visualization_turtle_name_ != ""; };
void spawnAndConfigureVisualizationTurtle(const turtlesim::msg::Pose & initial_pose);
void moveVisualizationTurtle(const turtlesim::msg::Pose & measurement);
rclcpp::TimerBase::SharedPtr timer_;
};
#endif
#robot_localization_demo.launch.py
from launch import LaunchDescription
from ament_index_python.packages import get_package_share_directory
import os
from launch_ros.actions import Node
def generate_launch_description():
return LaunchDescription([
Node(
package = 'turtlesim',
node_executable = 'turtlesim_node',
node_name = 'turtlesim',
),
# Node(
# package = 'turtlesim',
# node_executable = 'turtle_teleop_key',
# node_name = 'teleop',
# output='screen',
# ),
Node(
package = 'robot_localization_demo',
node_executable = 'positioning_system_node',
node_name = 'turtle1_positioning_system_node',
output='screen',
arguments=["-f","1.","-x","0.2","-y","0.2","-t","0.2","-v"],
#prefix = ['gdbserver localhost:3000'],
),
Node(
package = 'robot_localization_demo',
node_executable = 'odometry_node',
node_name = 'turtle1_odometry_node',
output='screen',
arguments=["-f","20.","-x","0.05","-X","0.","-t","0.","-T","0.02","-v"],
#prefix = ['gdbserver localhost:3000'],
),
Node(
package = 'robot_localization',
node_executable = 'ekf_node',
name = 'robot_localization_ekf_node_odom',
output='screen',
parameters=[os.path.join(get_package_share_directory("robot_localization_demo"), 'params', 'node_odom.yaml')],
remappings=[
('/odometry/filtered', '/odometry/filtered_twist'),
]
),
Node(
package = 'robot_localization',
node_executable = 'ekf_node',
name = 'robot_localization_ekf_node_map',
output='screen',
parameters=[os.path.join(get_package_share_directory("robot_localization_demo"), 'params', 'node_map.yaml')],
remappings=[
('/odometry/filtered', 'odometry/filtered_map'),
]
),
Node(
package = 'robot_localization_demo',
node_executable = 'transformation_visualization_node',
output='screen',
),
])
#node_map.yaml
### ekf config file ###
ekf_filter_node:
ros__parameters:
frequency: 30.0
sensor_timeout: 0.1
two_d_mode: true
transform_time_offset: 0.0
transform_timeout: 0.0
print_diagnostics: true
debug: false
debug_out_file: /path/to/debug/file.txt
publish_tf: true
publish_acceleration: false
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: map
twist0: /turtle1/sensors/twist
twist0_config: [false, false, false,
false, false, false,
true, true, false,
false, false, true,
false, false, false]
pose0: /turtle1/sensors/pose
pose0_config: [true, true, false,
false, false, true,
false, false, false,
false, false, true,
false, false, false]
#node_odom.yaml
### ekf config file ###
ekf_filter_node:
ros__parameters:
frequency: 30.0
sensor_timeout: 0.1
two_d_mode: true
transform_time_offset: 0.0
transform_timeout: 0.0
print_diagnostics: true
debug: false
publish_tf: true
publish_acceleration: false
map_frame: map
odom_frame: odom
base_link_frame: base_link
world_frame: odom
twist0: /turtle1/sensors/twist
twist0_config: [false, false, false,
false, false, false,
true, true, false,
false, false, true,
false, false, false]
twist0_differential: false
//odometry.cpp
#include "turtlesim/srv/spawn.hpp"
#include "turtlesim/srv/set_pen.hpp"
#include "turtlesim/srv/teleport_relative.hpp"
#include "odometry.hpp"
#include "rclcpp/rclcpp.hpp"
#include <chrono>
using std::placeholders::_1;
using namespace std::chrono_literals;
TurtleOdometry::TurtleOdometry( double frequency,
double error_vx_systematic, double error_vx_random, double error_wz_systematic, double error_wz_random, bool visualize):
Node("odometry_node"),
frequency_{frequency},
random_generator_{},
random_distribution_vx_{error_vx_systematic, error_vx_random},
random_distribution_wz_{error_wz_systematic, error_wz_random},
frame_sequence_{0},
visualize_{visualize},
visualization_turtle_name_{""}
{
client_cb_group_ = this->create_callback_group(rclcpp::callback_group::CallbackGroupType::MutuallyExclusive);
other_cb_group_ = this->create_callback_group(rclcpp::callback_group::CallbackGroupType::MutuallyExclusive);
other_cb_group_ = this->create_callback_group(rclcpp::callback_group::CallbackGroupType::MutuallyExclusive);
auto sub_opt = rclcpp::SubscriptionOptions();
sub_opt.callback_group = other_cb_group_;
turtle_pose_subscriber_ = this->create_subscription<turtlesim::msg::Pose>(
"turtle1/pose", 16, std::bind(&TurtleOdometry::turtlePoseCallback, this, _1),sub_opt);
turtle_twist_publisher_ = this->create_publisher<geometry_msgs::msg::TwistWithCovarianceStamped>("turtle1/sensors/twist", 16);
timer_ = this->create_wall_timer(
std::chrono::milliseconds((int)(1000/frequency_)), std::bind(&TurtleOdometry::spin, this),other_cb_group_);
}
TurtleOdometry::~TurtleOdometry() {
;
}
void TurtleOdometry::spin() {
// Distort real twist to get a 'measurement'.
auto measurement = cached_pose_;
measurement.linear_velocity *= (1. + random_distribution_vx_(random_generator_));
measurement.angular_velocity += measurement.linear_velocity * random_distribution_wz_(random_generator_);
// Publish measurement.
geometry_msgs::msg::TwistWithCovarianceStamped current_twist;
//current_twist.header.seq = ++ frame_sequence_;
current_twist.header.stamp = this->get_clock()->now();
current_twist.header.frame_id = "base_link";
current_twist.twist.twist.linear.x = measurement.linear_velocity;
current_twist.twist.twist.linear.y = 0.;
current_twist.twist.twist.linear.z = 0.;
current_twist.twist.twist.angular.x = 0.;
current_twist.twist.twist.angular.y = 0.;
current_twist.twist.twist.angular.z = measurement.angular_velocity;
current_twist.twist.covariance = std::array<double, 36>({
std::pow(random_distribution_vx_.mean() + random_distribution_vx_.stddev(), 2), 0., 0., 0., 0., 0.,
0., 0., 0., 0., 0., 0.,
0., 0., 0., 0., 0., 0.,
0., 0., 0., 0., 0., 0.,
0., 0., 0., 0., 0., 0.,
0., 0., 0., 0., 0., std::pow(measurement.linear_velocity * (random_distribution_wz_.mean() + random_distribution_wz_.stddev()), 2)});
turtle_twist_publisher_->publish(current_twist);
if(isVisualizationRequested() && isVisualizationTurtleAvailable()) {
moveVisualizationTurtle(measurement);
}
}
void TurtleOdometry::turtlePoseCallback(const turtlesim::msg::Pose::SharedPtr message) {
cached_pose_timestamp_ = this->get_clock()->now();
cached_pose_ = *message;
// If this is the first message, initialize the visualization turtle.
if(isVisualizationRequested() && !isVisualizationTurtleAvailable()) {
spawnAndConfigureVisualizationTurtle(*message);
}
}
void TurtleOdometry::spawnAndConfigureVisualizationTurtle(const turtlesim::msg::Pose & initial_pose) {
if(isVisualizationRequested() && !isVisualizationTurtleAvailable()) {
// Spawn a new turtle and store its name.
auto client = this->create_client<turtlesim::srv::Spawn>("spawn",rmw_qos_profile_services_default,client_cb_group_);
client->wait_for_service();
turtlesim::srv::Spawn::Request::SharedPtr spawn_visualization_turtle = std::make_shared<turtlesim::srv::Spawn::Request>();
spawn_visualization_turtle->x = initial_pose.x;
spawn_visualization_turtle->y = initial_pose.y;
spawn_visualization_turtle->theta = initial_pose.theta;
auto result_future = client->async_send_request(spawn_visualization_turtle);
result_future.wait();
auto result = result_future.get();
visualization_turtle_name_=result->name;
// Set pen color to red.
turtlesim::srv::SetPen::Request::SharedPtr configure_visualization_turtle = std::make_shared<turtlesim::srv::SetPen::Request>();
configure_visualization_turtle->r = 255;
configure_visualization_turtle->g = 0;
configure_visualization_turtle->b = 0;
configure_visualization_turtle->width = 1;
configure_visualization_turtle->off = 0;
auto client_configure = this->create_client<turtlesim::srv::SetPen>(visualization_turtle_name_ + "/set_pen",rmw_qos_profile_services_default,client_cb_group_);
auto set_pen_result_future = client_configure->async_send_request(configure_visualization_turtle);
set_pen_result_future.wait();
// Log message.
RCLCPP_INFO(this->get_logger(),"Relative position measurement (odometry) visualized by '%s' with a red pen.", visualization_turtle_name_.c_str());
}
}
void TurtleOdometry::moveVisualizationTurtle(const turtlesim::msg::Pose & measurement) {
if(isVisualizationRequested() && isVisualizationTurtleAvailable()) {
// Move visualization turtle to the 'measured' position.
turtlesim::srv::TeleportRelative::Request::SharedPtr visualize_current_twist =std::make_shared<turtlesim::srv::TeleportRelative::Request>();
visualize_current_twist->linear = measurement.linear_velocity / frequency_;
visualize_current_twist->angular = measurement.angular_velocity / frequency_;
auto client = this->create_client<turtlesim::srv::TeleportRelative>(
visualization_turtle_name_ + "/teleport_relative",rmw_qos_profile_services_default,client_cb_group_);
client->async_send_request(visualize_current_twist);
}
}
//odometry_node.cpp
#include <boost/program_options.hpp>
#include "rclcpp/rclcpp.hpp"
#include "odometry.hpp"
int main(int argc, char * argv[]) {
double frequency;
double error_vx_systematic;
double error_vx_random;
double error_wz_systematic;
double error_wz_random;
namespace po = boost::program_options;
po::options_description description("Recognised options");
description.add_options()
("help,h", "print help message")
("frequency,f", po::value<double>(&frequency)->default_value(1.), "set measurement frequency (Hz)")
("error-vx-systematic,X", po::value<double>(&error_vx_systematic)->default_value(0.), "set systematic error on X velocity")
("error-vx-random,x", po::value<double>(&error_vx_random)->default_value(0.), "set random error on X velocity")
("error-wz-systematic,T", po::value<double>(&error_wz_systematic)->default_value(0.), "set systematic error on angular velocity")
("error-wz-random,t", po::value<double>(&error_wz_random)->default_value(0.), "set random error on angular velocity")
("visualize,v", "visualize positioning system measurement");
po::variables_map variables_map;
po::store(po::parse_command_line(argc, argv, description), variables_map);
po::notify(variables_map);
if (variables_map.count("help")) {
std::cout << description << std::endl;
return EXIT_FAILURE;
}
rclcpp::init(argc, argv);
auto node = std::make_shared<TurtleOdometry>(frequency,
error_vx_systematic, error_vx_random, error_wz_systematic, error_wz_random,
(variables_map.count("visualize")? true: false));
rclcpp::executors::MultiThreadedExecutor executor;
executor.add_node(node);
executor.spin();
rclcpp::shutdown();
return EXIT_SUCCESS;
}
//positioning_system.cpp
#include "positioning_system.hpp"
#include "turtlesim/srv/spawn.hpp"
#include "turtlesim/srv/set_pen.hpp"
#include "turtlesim/srv/teleport_absolute.hpp"
#include "geometry_msgs/msg/pose_with_covariance_stamped.hpp"
#include <chrono>
#include <tf2/LinearMath/Quaternion.h>
#include "tf2_geometry_msgs/tf2_geometry_msgs.h"
using std::placeholders::_1;
using namespace std::chrono_literals;
TurtlePositioningSystem::TurtlePositioningSystem(double frequency, double error_x_systematic,
double error_x_random, double error_y_systematic, double error_y_random, double error_yaw_systematic,
double error_yaw_random, bool visualize):
Node("positioning_node"),
frequency_{frequency},
random_generator_{},
random_distribution_x_{error_x_systematic, error_x_random},
random_distribution_y_{error_y_systematic, error_y_random},
random_distribution_yaw_{error_yaw_systematic, error_yaw_random},
frame_sequence_{0},
visualize_{visualize},
visualization_turtle_name_{""}
{
client_cb_group_ = this->create_callback_group(rclcpp::callback_group::CallbackGroupType::MutuallyExclusive);
other_cb_group_ = this->create_callback_group(rclcpp::callback_group::CallbackGroupType::MutuallyExclusive);
auto sub_opt = rclcpp::SubscriptionOptions();
sub_opt.callback_group = other_cb_group_;
turtle_pose_subscriber_ = this->create_subscription<turtlesim::msg::Pose>(
"turtle1/pose", 16, std::bind(&TurtlePositioningSystem::turtlePoseCallback, this, _1),sub_opt);
turtle_pose_publisher_ = this->create_publisher<geometry_msgs::msg::PoseWithCovarianceStamped>("turtle1/sensors/pose", 16);
timer_ = this->create_wall_timer(
std::chrono::milliseconds((int)(1000/frequency_)), std::bind(&TurtlePositioningSystem::spin, this),other_cb_group_);
}
TurtlePositioningSystem::~TurtlePositioningSystem() {
;
}
void TurtlePositioningSystem::spin() {
// Distort real pose to get a 'measurement'.
auto measurement = cached_pose_;
measurement.x += random_distribution_x_(random_generator_);
measurement.y += random_distribution_y_(random_generator_);
measurement.theta += random_distribution_yaw_(random_generator_);
// Publish measurement.
geometry_msgs::msg::PoseWithCovarianceStamped current_pose;
//current_pose.header.seq = ++ frame_sequence_;
current_pose.header.stamp = this->get_clock()->now();
current_pose.header.frame_id = "map";
current_pose.pose.pose.position.x = measurement.x;
current_pose.pose.pose.position.y = measurement.y;
current_pose.pose.pose.position.z = 0.;
tf2::Quaternion quat;
quat.setRPY(0., 0., measurement.theta);
current_pose.pose.pose.orientation = tf2::toMsg(quat);
current_pose.pose.covariance = std::array<double, 36>({
std::pow(random_distribution_x_.mean() + random_distribution_x_.stddev(), 2), 0., 0., 0., 0., 0.,
0., std::pow(random_distribution_y_.mean() + random_distribution_y_.stddev(), 2), 0., 0., 0., 0.,
0., 0., 0., 0., 0., 0.,
0., 0., 0., 0., 0., 0.,
0., 0., 0., 0., 0., 0.,
0., 0., 0., 0., 0., std::pow(random_distribution_yaw_.mean() + random_distribution_yaw_.stddev(), 2)});
turtle_pose_publisher_->publish(current_pose);
if(isVisualizationRequested() && isVisualizationTurtleAvailable()) {
moveVisualizationTurtle(measurement);
}
}
void TurtlePositioningSystem::turtlePoseCallback(const turtlesim::msg::Pose::SharedPtr message) {
cached_pose_timestamp_ =this->get_clock()->now();
cached_pose_ = *message;
// If this is the first message, initialize the visualization turtle.
if(isVisualizationRequested() && !isVisualizationTurtleAvailable()) {
spawnAndConfigureVisualizationTurtle(*message);
}
}
void TurtlePositioningSystem::spawnAndConfigureVisualizationTurtle(const turtlesim::msg::Pose & initial_pose) {
if(isVisualizationRequested() && !isVisualizationTurtleAvailable()) {
// Spawn a new turtle and store its name.
auto client = this->create_client<turtlesim::srv::Spawn>("spawn",rmw_qos_profile_services_default,client_cb_group_);
client->wait_for_service();
turtlesim::srv::Spawn::Request::SharedPtr spawn_visualization_turtle = std::make_shared<turtlesim::srv::Spawn::Request>();
spawn_visualization_turtle->x = initial_pose.x;
spawn_visualization_turtle->y = initial_pose.y;
spawn_visualization_turtle->theta = initial_pose.theta;
// auto set_turtle_name = [&](rclcpp::Client<turtlesim::srv::Spawn>::SharedFuture inner_future){
// auto result = inner_future.get();
// visualization_turtle_name_=result->name;
auto result_future = client->async_send_request(spawn_visualization_turtle);
result_future.wait();
auto result = result_future.get();
visualization_turtle_name_=result->name;
// Set pen color to blue.
turtlesim::srv::SetPen::Request::SharedPtr configure_visualization_turtle = std::make_shared<turtlesim::srv::SetPen::Request>();
configure_visualization_turtle->r = 0;
configure_visualization_turtle->g = 0;
configure_visualization_turtle->b = 255;
configure_visualization_turtle->width = 1;
configure_visualization_turtle->off = 0;
auto client_configure = this->create_client<turtlesim::srv::SetPen>(visualization_turtle_name_ + "/set_pen",rmw_qos_profile_services_default,client_cb_group_);
auto set_pen_result_future = client_configure->async_send_request(configure_visualization_turtle);
set_pen_result_future.wait();
// Log message.
RCLCPP_INFO(this->get_logger(),"Relative position measurement (odometry) visualized by '%s' with a blue pen.", visualization_turtle_name_.c_str());
}
}
void TurtlePositioningSystem::moveVisualizationTurtle(const turtlesim::msg::Pose & measurement) {
if(isVisualizationRequested() && isVisualizationTurtleAvailable()) {
// Move visualization turtle to the 'measured' position.
turtlesim::srv::TeleportAbsolute::Request::SharedPtr visualize_current_pose = std::make_shared<turtlesim::srv::TeleportAbsolute::Request>();
visualize_current_pose->x = measurement.x;
visualize_current_pose->y = measurement.y;
visualize_current_pose->theta = measurement.theta;
auto client = this->create_client<turtlesim::srv::TeleportAbsolute>(
visualization_turtle_name_ + "/teleport_absolute",rmw_qos_profile_services_default,client_cb_group_);
client->async_send_request(visualize_current_pose);
}
}
//positioning_system_node.cpp
#include <boost/program_options.hpp>
#include "rclcpp/rclcpp.hpp"
#include "positioning_system.hpp"
int main(int argc, char * argv[]) {
double frequency;
double error_x_systematic;
double error_x_random;
double error_y_systematic;
double error_y_random;
double error_yaw_systematic;
double error_yaw_random;
namespace po = boost::program_options;
po::options_description description("Recognised options");
description.add_options()
("help,h", "print help message")
("frequency,f", po::value<double>(&frequency)->default_value(1.), "set measurement frequency (Hz)")
("error-x-systematic,X", po::value<double>(&error_x_systematic)->default_value(0.), "set systematic error on X")
("error-x-random,x", po::value<double>(&error_x_random)->default_value(0.), "set random error on X")
("error-y-systematic,Y", po::value<double>(&error_y_systematic)->default_value(0.), "set systematic error on Y")
("error-y-random,y", po::value<double>(&error_y_random)->default_value(0.), "set random error on Y")
("error-yaw-systematic,T", po::value<double>(&error_yaw_systematic)->default_value(0.), "set systematic error on yaw")
("error-yaw-random,t", po::value<double>(&error_yaw_random)->default_value(0.), "set random error on yaw")
("visualize,v", "visualize positioning system measurement");
po::variables_map variables_map;
po::store(po::parse_command_line(argc, argv, description), variables_map);
po::notify(variables_map);
if (variables_map.count("help")) {
std::cout << description << std::endl;
return EXIT_FAILURE;
}
rclcpp::init(argc, argv);
auto node = std::make_shared<TurtlePositioningSystem> (frequency,
error_x_systematic, error_x_random, error_y_systematic, error_y_random,
error_yaw_systematic, error_yaw_random, (variables_map.count("visualize")? true: false));
rclcpp::executors::MultiThreadedExecutor executor;
executor.add_node(node);
executor.spin();
rclcpp::shutdown();
return EXIT_SUCCESS;
}
//transformation_visualization_node.cpp
#include "rclcpp/rclcpp.hpp"
#include <tf2_geometry_msgs/tf2_geometry_msgs.h>
#include <tf2_ros/transform_listener.h>
#include "geometry_msgs/msg/transform_stamped.hpp"
#include "turtlesim/srv/spawn.hpp"
#include "turtlesim/srv/set_pen.hpp"
#include "turtlesim/srv/teleport_absolute.hpp"
#include <chrono>
using namespace std::chrono_literals;
int main(int argc, char* argv[]) {
rclcpp::init(argc, argv);
std::shared_ptr<rclcpp::Node> node = rclcpp::Node::make_shared("transformation_visualization_node");
tf2_ros::Buffer tf_buffer(node->get_clock());
tf2_ros::TransformListener tf_listener(tf_buffer);
// Spawn a new turtle and store its name.
auto client = node->create_client<turtlesim::srv::Spawn>("spawn");
while (!client->wait_for_service(std::chrono::seconds(1))) {
if (!rclcpp::ok()) {
RCLCPP_ERROR(node->get_logger(), "client interrupted while waiting for service to appear.");
return 1;
}
RCLCPP_INFO(node->get_logger(), "waiting for service to appear...");
}
turtlesim::srv::Spawn::Request::SharedPtr spawn_visualization_turtle = std::make_shared<turtlesim::srv::Spawn::Request>();
spawn_visualization_turtle->x = 0;
spawn_visualization_turtle->y = 0;
spawn_visualization_turtle->theta = 0;
auto result_future = client->async_send_request(spawn_visualization_turtle);
if (rclcpp::spin_until_future_complete(node, result_future) !=
rclcpp::executor::FutureReturnCode::SUCCESS)
{
RCLCPP_ERROR(node->get_logger(), "service call failed :(");
//client->remove_pending_request(result_future);
return 1;
}
auto result = result_future.get();
auto visualization_turtle_name = result->name;
// Set pen color to light blue.
turtlesim::srv::SetPen::Request::SharedPtr configure_visualization_turtle = std::make_shared<turtlesim::srv::SetPen::Request>();
configure_visualization_turtle->r = 0;
configure_visualization_turtle->g = 255;
configure_visualization_turtle->b = 0;
configure_visualization_turtle->width = 3;
configure_visualization_turtle->off = 0;
auto client_configure = node->create_client<turtlesim::srv::SetPen>( visualization_turtle_name + "/set_pen");
auto result_future_setpen = client_configure->async_send_request(configure_visualization_turtle);
if (rclcpp::spin_until_future_complete(node, result_future_setpen) !=
rclcpp::executor::FutureReturnCode::SUCCESS)
{
RCLCPP_ERROR(node->get_logger(), "service call failed :(");
//client->remove_pending_request(result_future);
return 1;
}
// Log message.
RCLCPP_INFO(node->get_logger(),"Absolute position estimate visualized by '%s' using a green pen.", visualization_turtle_name.c_str());
// Visualize the estimated position of the turtle in the map frame.
rclcpp::Rate a(10);
while(rclcpp::ok()) {
// Get base_link to map transformation.
geometry_msgs::msg::TransformStamped base_link_to_map_transform;
try {
base_link_to_map_transform = tf_buffer.lookupTransform("map", "base_link", tf2::TimePointZero);
}
catch (tf2::TransformException &ex) {
RCLCPP_INFO(node->get_logger(),"tf2_ros::Buffer::lookupTransform failed: %s", ex.what());
rclcpp::sleep_for(1s);
continue;
}
// Move visualization turtle to the estimated position.
geometry_msgs::msg::PoseStamped pose_base_link, pose_map;
pose_base_link.header.stamp = node->get_clock()->now();
pose_base_link.header.frame_id = "base_link";
pose_base_link.pose.position.x = 0.;
pose_base_link.pose.position.y = 0.;
pose_base_link.pose.position.z = 0.;
pose_base_link.pose.orientation.x = 0.;
pose_base_link.pose.orientation.y = 0.;
pose_base_link.pose.orientation.z = 0.;
pose_base_link.pose.orientation.w = 1.;
tf2::doTransform(pose_base_link, pose_map, base_link_to_map_transform);
turtlesim::srv::TeleportAbsolute::Request::SharedPtr visualize_current_pose = std::make_shared<turtlesim::srv::TeleportAbsolute::Request>();
visualize_current_pose->x = pose_map.pose.position.x;
visualize_current_pose->y = pose_map.pose.position.y;
tf2::Quaternion quaternion(pose_map.pose.orientation.x, pose_map.pose.orientation.y, pose_map.pose.orientation.z, pose_map.pose.orientation.w);
visualize_current_pose->theta = quaternion.getAngle();
auto client_visual =node->create_client<turtlesim::srv::TeleportAbsolute>(visualization_turtle_name + "/teleport_absolute");
auto result_future_visual =client_visual->async_send_request(visualize_current_pose);
if (rclcpp::spin_until_future_complete(node, result_future_visual) !=
rclcpp::executor::FutureReturnCode::SUCCESS)
{
RCLCPP_ERROR(node->get_logger(), "service call failed :(");
//client->remove_pending_request(result_future);
return 1;
}
// Sleep until the next update.
a.sleep();
}
return EXIT_SUCCESS;
}
#CMakeLists.txt
cmake_minimum_required(VERSION 3.5)
project(robot_localization_demo)
# Default to C99
if(NOT CMAKE_C_STANDARD)
set(CMAKE_C_STANDARD 99)
endif()
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
set(CMAKE_PREFIX_PATH ../../install)
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(tf2_ros REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(turtlesim REQUIRED)
find_package(tf2 REQUIRED)
find_package(tf2_geometry_msgs REQUIRED)
find_package(robot_localization REQUIRED)
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)
find_package(Boost REQUIRED COMPONENTS program_options)
include_directories(${Boost_INCLUDE_DIRS})
add_executable(odometry_node src/odometry_node.cpp src/odometry.cpp)
target_include_directories(odometry_node PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include>)
ament_target_dependencies(
odometry_node
rclcpp
geometry_msgs
turtlesim
tf2
tf2_ros
)
target_link_libraries(odometry_node
Boost::program_options
)
add_executable(positioning_system_node src/positioning_system_node.cpp src/positioning_system.cpp)
target_include_directories(positioning_system_node PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include>)
ament_target_dependencies(
positioning_system_node
rclcpp
geometry_msgs
turtlesim
tf2
tf2_ros
)
target_link_libraries(positioning_system_node
Boost::program_options
)
add_executable(transformation_visualization_node src/transformation_visualization_node.cpp)
target_include_directories(transformation_visualization_node PUBLIC
$<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include>
$<INSTALL_INTERFACE:include>)
ament_target_dependencies(
transformation_visualization_node
rclcpp
geometry_msgs
turtlesim
tf2
tf2_ros
tf2_geometry_msgs
)
install(TARGETS odometry_node positioning_system_node transformation_visualization_node
DESTINATION lib/${PROJECT_NAME})
install(DIRECTORY
params
launch
DESTINATION share/${PROJECT_NAME}
USE_SOURCE_PERMISSIONS
)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# uncomment the line when a copyright and license is not present in all source files
#set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# uncomment the line when this package is not in a git repo
#set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
///package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>robot_localization_demo</name>
<version>0.0.0</version>
<description>TODO: Package description</description>
<maintainer email="a@todo.todo">a</maintainer>
<license>TODO: License declaration</license>
<depend>geometry_msgs</depend>
<depend>robot_localization</depend>
<depend>rclcpp</depend>
<depend>tf2</depend>
<depend>tf2_ros</depend>
<depend>turtlesim</depend>
<depend>RL</depend>
<buildtool_depend>ament_cmake</buildtool_depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
4、编译使用
将教程代码进行编译,随后launch运行,并在单独的窗口运行小乌龟控制节点,即可开始测试。

















 8324
8324

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









