










2025.03.31. 新加坡南洋理工大学研究团队在《Chemical Reviews》期刊上发表 “Soft Materials and Devices Enabling Sensorimotor Functions in Soft Robots” 综述型文章。软机器人的传感器运动功能对其与环境交互至关重要,本文全面综述了相关软材料和设备。传感技术涵盖压力、应变等多种类型,各有独特机制和材料 ;驱动方式多样,如流体、电活性驱动等,性能特点各异。结构设计包括屈曲、折纸等结构, fabrication techniques 包含模板、激光辅助制造等多种方法。传感器运动控制有模型、数据驱动等策略,人工智能的融入提升了机器人的感知和决策能力。软机器人在探索、医疗等领域应用广泛,未来发展需在材料发现、仿生、能源等多方面取得突破,协同设计优化传感器和执行器将是关键研究方向。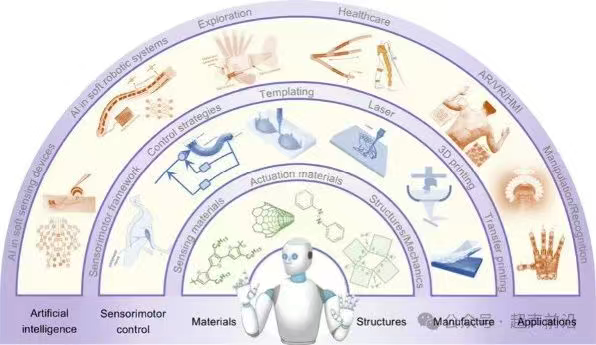
软机器人的传感器运动功能是其与环境交互的基础,本文围绕实现该功能的软材料和设备展开全面综述,涵盖传感技术、驱动方式、结构设计、制造技术、控制策略、人工智能应用、实际应用领域以及未来发展方向等内容。1. 传感技术压力传感器:基于电阻、电容、压电、摩擦电等多种机制工作。如压电电阻式压力传感器,金属材料(如液态金属、金纳米线)、碳基材料(如石墨烯、碳纳米管)和聚合物材料(如 PAAm/PVA 水凝胶)等被广泛应用,各材料制成的传感器在灵敏度、压力范围、响应时间等性能上有所差异。应变传感器:分为电阻式、电容式、压电和摩擦电式等类型。电阻式应变传感器使用碳纳米材料、金属等作为功能材料;电容式应变传感器通过改变电容来检测应变,部分采用水凝胶离子导体提升性能;压电和摩擦电式应变传感器则利用相应效应实现机械能到电能的转换。其他传感器:温度传感器包括电阻式、热敏电阻、热电偶等类型,在医疗、机器人等领域有应用;光学传感器基于光电导或光伏效应工作,分为无机和有机材料两类,可用于机器人视觉等;化学传感器利用碳材料、过渡金属二硫属化物等检测化学物质;声学传感器涵盖超声和可听波传感器,在医疗成像、人机交互等方面发挥作用;电磁传感器包括磁感受和电感受系统,模仿生物导航和感知机制 。此外,还有多模态集成传感器,能同时检测多种刺激,提升机器人感知能力。
2. 驱动方式流体驱动:包括液压和气动驱动。液压驱动通过注入流体使软机器人产生运动,如微流体折纸可重构气动 / 液压(MORPH)系统;气动驱动常见于步行机器人和康复设备,如褶皱气动人工肌肉(PPAM)。电活性驱动:包含介电弹性体、液压放大静电、压电和电化学驱动等。介电弹性体驱动器具有高能量密度等优点,如用于制造软阀和透明扬声器;液压放大静电驱动器结合了软流体和介电弹性体的优势;压电驱动器适用于微尺度应用,助力微飞行器发展;电化学驱动器基于离子运动产生动作,用于医疗设备等领域。其他驱动:磁驱动利用磁场产生运动,包括固态、液态磁机器人及磁机器人集群;光驱动通过光使材料产生形状变化,如液晶聚合物、水凝胶等;热驱动借助热膨胀或收缩实现,如液晶弹性体和形状记忆材料;化学驱动利用化学反应,如对有机蒸汽、湿度、酶和 pH 值的响应;还有声学、生物杂交、燃烧等其他驱动方式。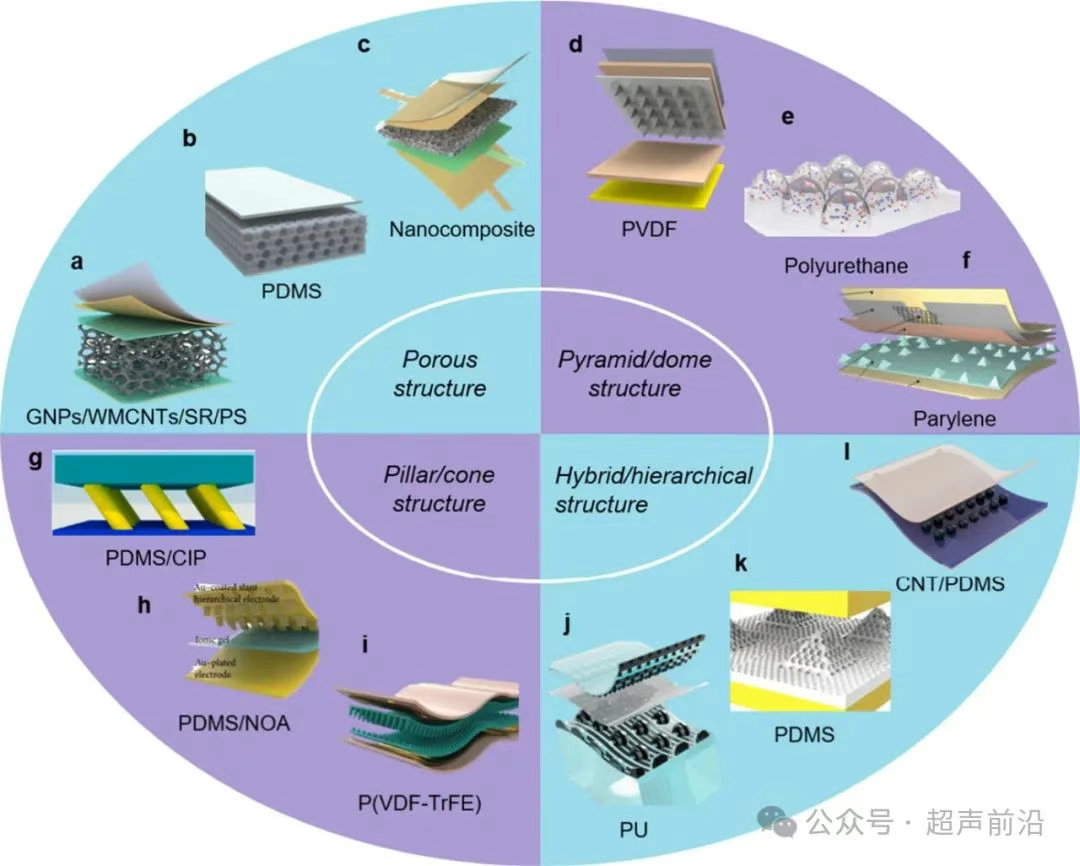
3. 结构与制造结构设计:屈曲结构可增强设备机械性能,在柔性电子设备和软机器人中广泛应用;折纸和剪纸结构源于艺术,为柔性传感和机器人设计提供灵感;纤维和织物可集成多种功能,用于制造传感器和执行器;此外还有其他特殊结构,用于实现特定功能。制造技术:模板法用于制造形状明确的软机器人部件;激光辅助制造可进行切割、雕刻和表面改性;3D 打印能实现复杂结构的定制化制造;转移打印用于将组件集成到目标基板上;组装则是将多个部分组合成新结构或设备,分为材料、电子设备和机器人系统三个层面。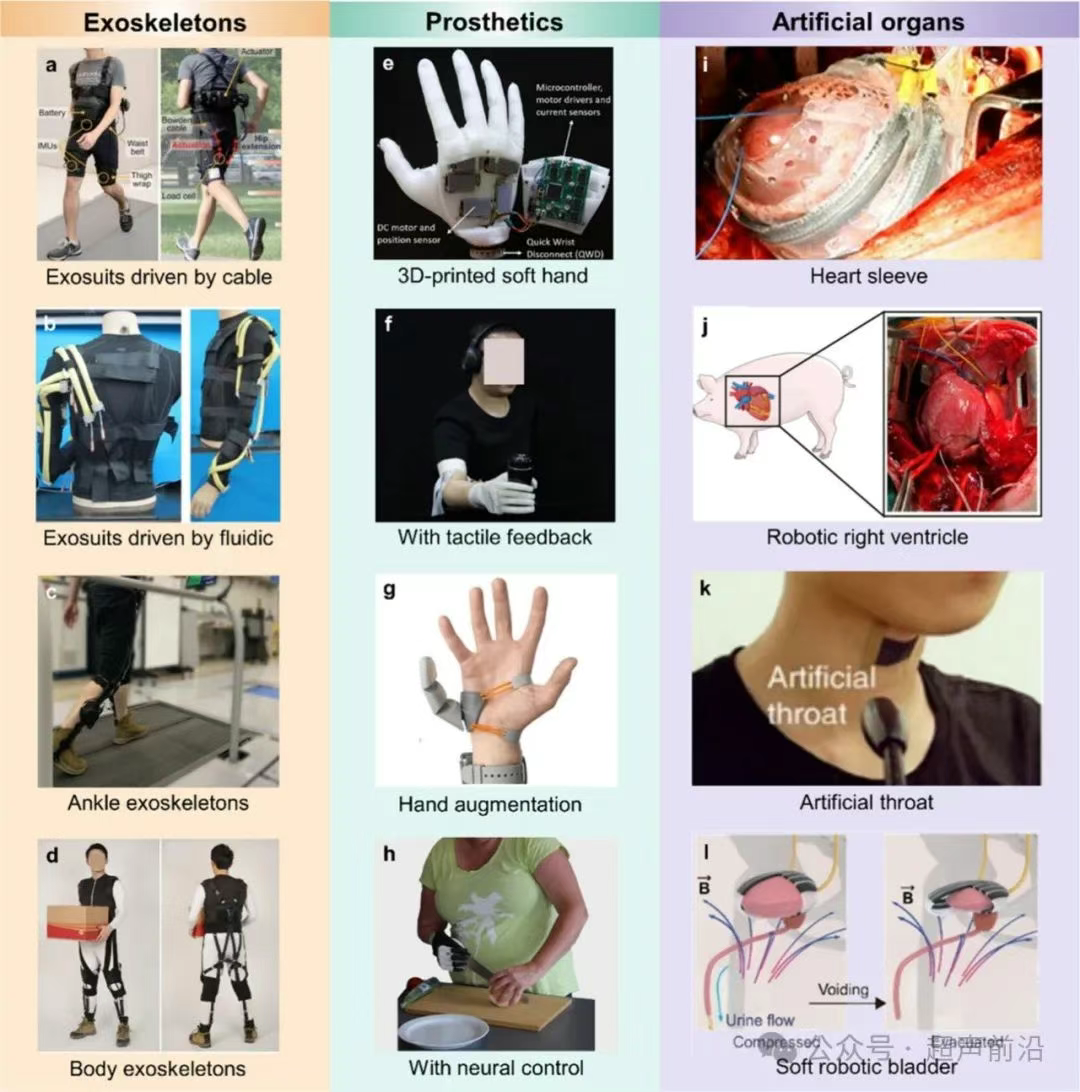
4. 控制与 AI控制策略:传感器运动控制协调传感与驱动,常见方法有基于模型的控制(如有限元法)、数据驱动控制(如强化学习)和分层 / 混合控制(如模仿章鱼神经结构。人工智能:机器学习框架包括多种算法,在软机器人中用于感知、决策和控制;AI 可增强柔性电子传感设备的数据处理能力;在软机器人系统中,AI 有助于感知、控制和形态重建。5. 应用领域探索领域:软机器人在航空、陆地、水下及跨介质探索中均有应用,如受植物种子启发的微型飞行器、仿生小鼠机器人、深海探索软机器人等。医疗领域:用于外骨骼、假肢、人造器官、药物输送、导管和手术工具等,如可辅助心脏功能的软机器人套筒、3D 打印的软机器人手。扩展现实领域:通过触觉反馈设备和人机交互技术,提升虚拟现实和增强现实体验,如触觉手套、可穿戴触觉显示器等。操作领域:软机器人可实现物体处理和识别,如基于不同原理的软抓手和配备传感器的机器人手。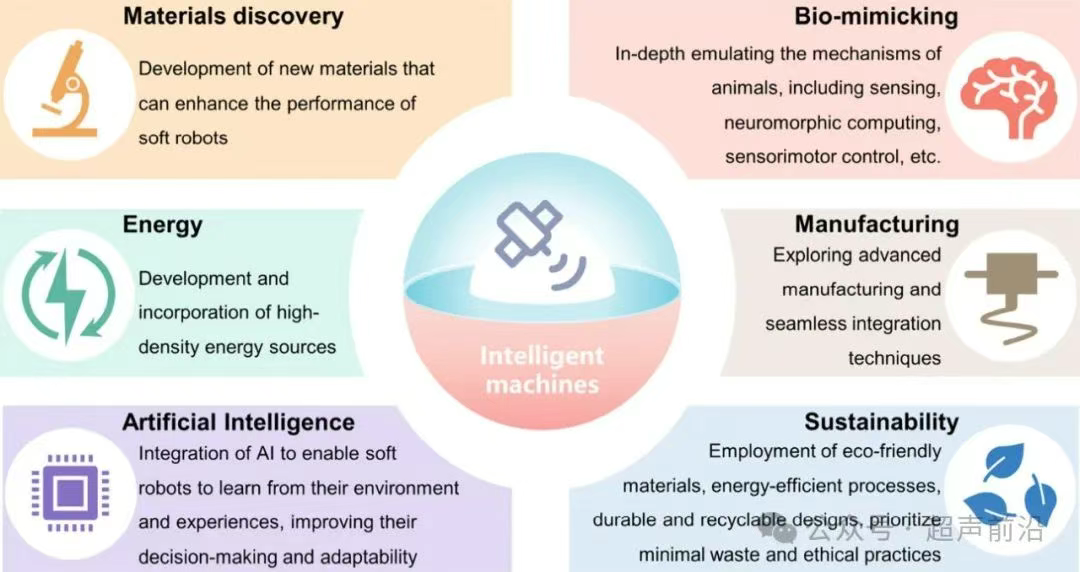
6. 未来发展未来软机器人发展需在材料发现(如生物杂交材料、超材料)、仿生(深入研究生物机制)、能源(开发柔性电池)、制造(采用 4D 打印等技术)、人工智能(优化设计和控制)和可持续性(采用环保材料和制造工艺)等方面取得突破。

















 4410
4410

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









