







A4988电机驱动板引脚

VMOT:电源正(8~35V),供电机
GND:电机接地
2B,2A:电机绕组2控制引脚
1A.1B:电机绕组1控制引脚
VDD:驱动板电源正(3~5V)
GND:驱动板地
ENABLE:引脚低电平,A4988才能进行电机驱动工作(悬空为默认状态,可以正常工作),高电平,A4988将不会经行电机驱动工作
MS1,MS2,MS3:用来改变驱动模式具体如图
REST:低电平有效,A4988将经行复位,默认为高,可以正常工作
SLEEP:低电平经行低能耗睡眠状态,无需使用时可与REST连接,则保持正常工作不会进入低能耗状态。
STEP:步进引脚,根据脉冲经行动作
DIR:方向引脚,低:顺时针,高:逆时针
A46988使用之前要进行电压调节
电压=最大电流(电机电流)X A4988电阻 X8(本案例v=1.50.18=1.2)
一般电阻为0.05欧,0.1欧,0.2欧
电位器调节电压:顺时针调大,逆时针调小(可用万用表测电位器与接地端)
本次试验用arduino开发板
程序一:顺时针旋转一圈,逆时针快速旋转2圈
// 定义电机控制用常量
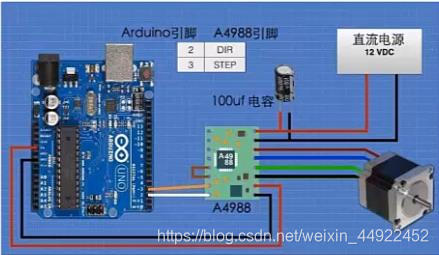
// A4988连接Arduino引脚号
const int dirPin = 2; // 方向引脚
const int stepPin = 3; // 步进引脚
// 电机每圈步数
const int STEPS_PER_REV = 200;
void setup() {
// Arduino控制A4988步进和方向的引脚为输出模式
pinMode(stepPin,OUTPUT);
pinMode(dirPin,OUTPUT);
}
void loop() {
// 设置电机顺时针旋转
digitalWrite(dirPin,LOW);
// 电机慢速旋转
for(int x = 0; x < STEPS_PER_REV; x++) {
digitalWrite(stepPin,HIGH);
delayMicroseconds(2000); //延迟2000微秒delayMicroseconds最多16383
digitalWrite(stepPin,LOW);
delayMicroseconds(2000);
}
// 等待一秒
delay(1000);
// 设置电机逆时针旋转
digitalWrite(dirPin,HIGH);
// 电机快速旋转
for(int x = 0; x < (STEPS_PER_REV * 2); x++) {
digitalWrite(stepPin,HIGH);
delayMicroseconds(1000);
digitalWrite(stepPin,LOW);
delayMicroseconds(1000);
}
// 等待一秒
delay(1000);
}

















 7667
7667

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









