




 本文详细解析了SLAM问题中的贝叶斯网络建模,从贝叶斯网络到因子图的转换,以及非线性最小二乘求解(iSAM、iSAM2)的过程,包括增量QR分解和isam2方法。重点讲解了因子图优化在SLAM中的应用和关键步骤。
本文详细解析了SLAM问题中的贝叶斯网络建模,从贝叶斯网络到因子图的转换,以及非线性最小二乘求解(iSAM、iSAM2)的过程,包括增量QR分解和isam2方法。重点讲解了因子图优化在SLAM中的应用和关键步骤。
因子图优化原理(iSAM、iSAM2)
slam问题
在介绍因子图之前,先从一个简单的slam问题入手,如下图所示:

在图中清晰的显示了各个节点和和连接结点边之间的定义,对于图结构不做过多说明,假定读者已经有一定的先验知识。在上图显示的slam问题中,实际上我们要解决的问题就是,从机器人的控制和观测中恢复机器人的路径以及环境地图。
通过贝叶斯网络对slam问题建模
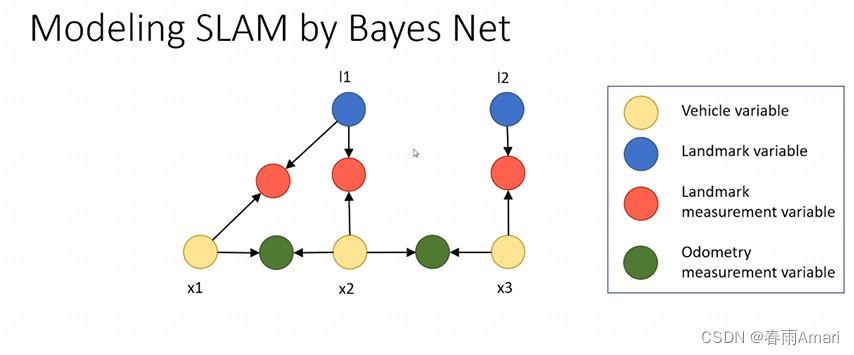
在贝叶斯网络中,通过有向边连接变量,除了路标状态节点和机器人的状态节点外(两个状态节点为状态变量),还定义了路标观测节点(红色)和运动观测节点(绿色)(两个观测节点为观测变量)。这个贝叶斯实际上描述了一种状态和观测的联合概率模型。假设知道系统的状态变量X(机器人所在位置、路标点所在位置),可以推测出机器人得到的观测量Z(观测量是通过某些传感器得到的,而传感器有已知模型,可以通过数据手册得到),即已知机器人的状态量和传感器的模型,就可以推算出机器人的观测量。所以得到了如下图所示的一个生成模型:
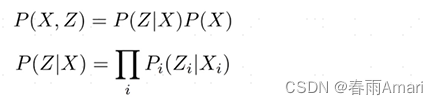
由于观测量之间相互独立,可以得到下式所述的模型:

从贝叶斯网络到因子图
基于上文,我们知道贝叶斯网络是一个生成模型,解决的从状态变量得到观测观测变量,而我们的问题是从观测变量来推出状态变量,是一个状态估计问题,这就引出了因子图,因子图是一个inference model。
首先来对问题做一个推导:由于我们要从观测量来推出状态量,这是一个后验概率问题,结合贝叶斯丁玲,问题被描述为最大化一个后验概率问题(MAP),即给定系统系统观测量,求解系统状态量,使得下式的条件概率最大:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 675
675












 到【灌水乐园】发言
到【灌水乐园】发言







