






问题描述
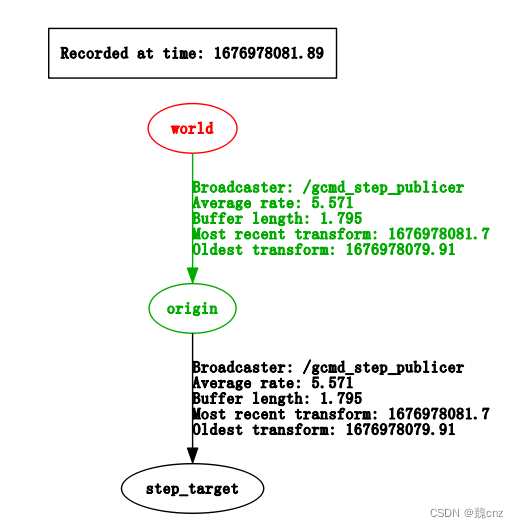
我在一个节点在发布了tf关系后,已经确认了tf成功发布,但是当我在新节点想要调用tf的监听时,比如调用transformPoint, lookupTransform 。但是节点却一直一直在报错,尽管已经确认tf tree已经正确发布了。
StepTargetVizable:"world" passed to lookupTransform argument target_frame does not exist.
解决方法
尝试很久才找到的解决方法:需要将对象tf::TransformListener tf_listener
放在main函数的ros::init 之后,不能放在子函数里,子函数里也可以改用通过传参进来。至于为什么,还等评论补充。
代码示例
// 会失败的写法,直接把tf_listener 对象定义在函数内
void StepTargerVizableLoop(void)
{
geometry_msgs::PointStamped turtle_target;
geometry_msgs::PointStamped turtle_target_in_world;
tf::TransformListener tf_listener; // 直接把tf_listener 对象定义在函数内,这样会报这种错误
turtle_target.header.stamp = ros::Time();
turtle_target.header.frame_id = "step_target";
turtle_target.point.x = 0.0;
turtle_target.point.y = 0.0;
try {
tf_listener.transformPoint("world", turtle_target, turtle_target_in_world); // lookupTransform同理
}
catch (tf::TransformException &e) {
ROS_ERROR("StepTargetVizable:%s", e.what());
ros::Duration(1.0).sleep();
return;
}
}
// 成功的写法,tf_listener 对象先在main的ros::init后面定义,然后再传入
void StepTargerVizableLoop(tf::TransformListener &tf_listener)
{
geometry_msgs::PointStamped turtle_target;
geometry_msgs::PointStamped turtle_target_in_world;
turtle_target.header.stamp = ros::Time();
turtle_target.header.frame_id = "step_target";
turtle_target.point.x = 0.0;
turtle_target.point.y = 0.0;
try {
tf_listener.transformPoint("world", turtle_target, turtle_target_in_world);
}
catch (tf::TransformException &e) {
ROS_ERROR("StepTargetVizable:%s", e.what());
ros::Duration(1.0).sleep();
return;
}
}















 778
778

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









