









【ROS、STM32】ROS与STM32通信
本章节主要解决的是如何在ROS与STM32之间建立串口通信,达到相互发送和接收对方数据的目的,从而为我们自己以ros操作系统开发硬件提供相应的便利。
一、相关原理及准备工作
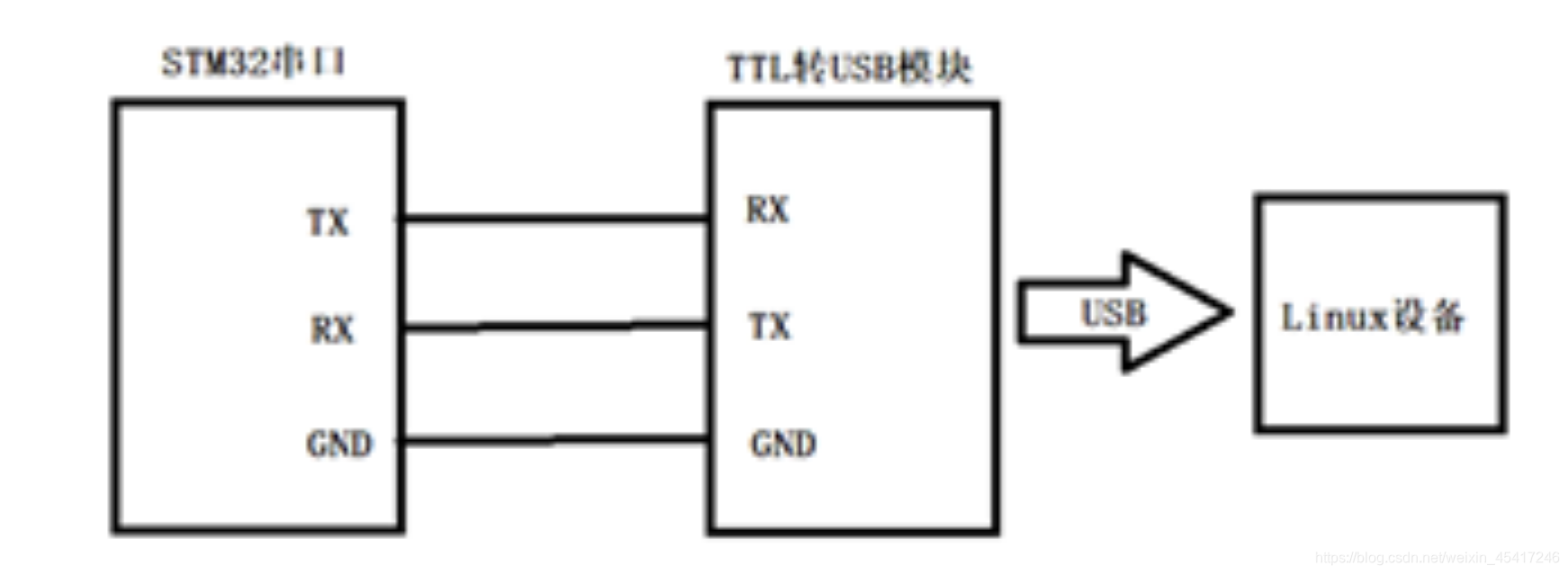
完成ROS与STM32之间的串口通信,需要准备的硬件有STM32串口,TTL转USB模块,Linux硬件设备,博主使用的STM32是正点原子的STM32精英板,Linux硬件设备下搭载的rROS环境是ros-kinetic,其工作原理如下图所示
在开始ROS与STM32的通信之前,需要注意以下几点
(1)确保stm32端和ros端波特率一定一致
(2)确保是stm32串口,TTL转USB模块和Linux设备之间是按照上图所示连接,TX与RX相连,RX与TX相连,同时,也要测试连接线的好坏
(3)确保linux设备系统中有CH340/CH341驱动,一般情况下都会有,如果没有CH340/CH341驱动,需要到网上查找相关资料下载驱动
(4)确保自己的串口在Linux系统中具有超级用户权限(一般都默认不具有该权限),一般插上TTL转USB模块,Linux系统中就可以检测到ttyUSB0的串口设备
(5)如果插上TTL转USB模块后,Linux系统中查询的串口设备不是ttyUSB0的话,在编写相应的程序时,要注意串口设备名称的一致性
二、STM32与ROS工程文件下载
所需要的的STM32与ROS工程文件百度云链接如下
链接: https://pan.baidu.com/s/1oOcfHVRdzKeyQKiBKLHsrg.
提取码:abcd
STM32与ROS工程文件所包含的工程文件
(1)STM32端:STM32与ROS串口通信测试工程文件
(2)ROS端:ROS与STM32串口通信测试功能包文件
1、STM32测试工程文件结构
主要包括:
(1)主函数main.c
(2)文件mbotLinuxUsart.c
STM32与ROS串口通信测试工程文件程序详解
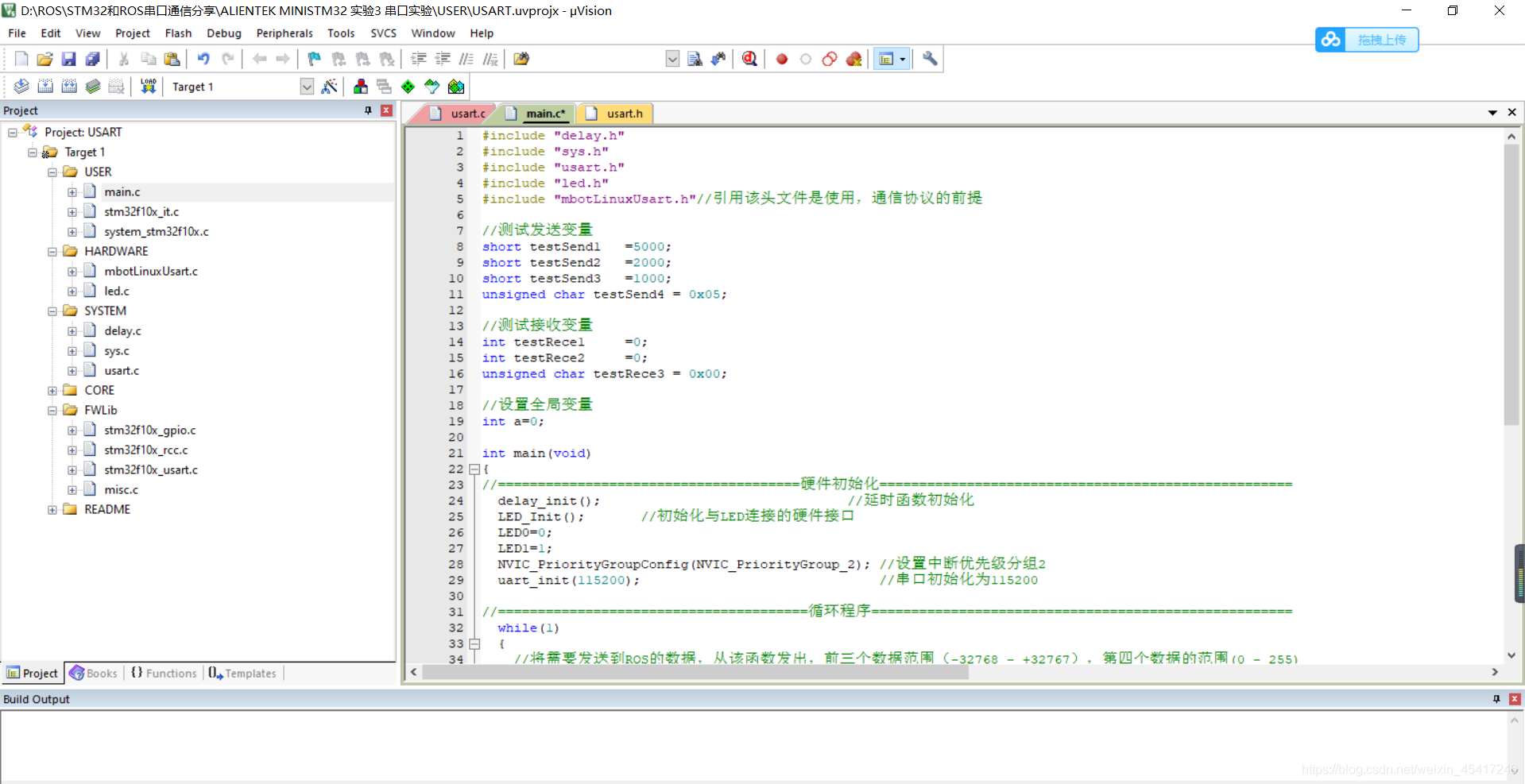
main.c文件
#include "delay.h"
#include "sys.h"
#include "usart.h"
#include "led.h"
#include "mbotLinuxUsart.h"
//测试发送变量
short testSend1 =5000;
short testSend2 =2000;
short testSend3 =1000;
unsigned char testSend4 = 0x05;
//测试接收变量
int testRece1 =0;
int testRece2 =0;
unsigned char testRece3 = 0x00;
int main(void)
{
delay_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
uart_init(115200);
while(1)
{
usartSendData(testSend1,testSend2,testSend3,testSend4);
delay_ms(13);
}
}
//串口中断服务函数,接收数据
void USART1_IRQHandler()
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
USART_ClearITPendingBit(USART1,USART_IT_RXNE);
//从ROS接收数据,并把他们存放到以下三个变量当中
usartReceiveOneData(&testRece1,&testRece2,&testRece3);
}
}
mbotLinuxUsart.c文件
#include "mbotLinuxUsart.h"
#include "usart.h"
//数据接收暂存区
unsigned char receiveBuff[16] = {0};
//通信协议常量
const unsigned char header[2] = {0x55, 0xaa};
const unsigned char ender[2] = {0x0d, 0x0a};
//发送数据共用体
union sendData
{
short d;
unsigned char data[2];
}leftVelNow,rightVelNow,angleNow;
//接收数据共用体
union receiveData
{
short d;
unsigned char data[2];
}leftVelSet,rightVelSet;
int usartReceiveOneData(int *p_leftSpeedSet,int *p_rightSpeedSet,unsigned char *p_crtlFlag)
{
unsigned char USART_Receiver = 0;
static unsigned char checkSum = 0;
static unsigned char USARTBufferIndex = 0;
static short j=0,k=0;
static unsigned char USARTReceiverFront = 0;
static unsigned char Start_Flag = START;
static short dataLength = 0;
USART_Receiver = USART_ReceiveData(USART1);
if(Start_Flag == START)
{
if(USART_Receiver == 0xaa)
{
if(USARTReceiverFront == 0x55)
{
Start_Flag = !START;
printf("header ok\n");
receiveBuff[0]=header[0];
receiveBuff[1]=header[1];
USARTBufferIndex = 0;
checkSum = 0x00;
}
}
else
{
USARTReceiverFront = USART_Receiver;
}
}
else
{
switch(USARTBufferIndex)
{
case 0:
receiveBuff[2] = USART_Receiver;
dataLength = receiveBuff[2]; //buf[2]
USARTBufferIndex++;
break;
case 1:
receiveBuff[j + 3] = USART_Receiver; //buf[3] - buf[7]
j++;
if(j >= dataLength)
{
j = 0;
USARTBufferIndex++;
}
break;
case 2:
receiveBuff[3 + dataLength] = USART_Receiver;
checkSum = getCrc8(receiveBuff, 3 + dataLength);
if (checkSum != receiveBuff[3 + dataLength]) //buf[8]
{
printf("Received data check sum error!");
return 0;
}
USARTBufferIndex++;
break;
case 3:
if(k==0)
{
k++;
}
else if (k==1)
{
for(k = 0; k < 2; k++)
{
leftVelSet.data[k] = receiveBuff[k + 3]; //buf[3] buf[4]
rightVelSet.data[k] = receiveBuff[k + 5]; //buf[5] buf[6]
}
*p_leftSpeedSet = (int)leftVelSet.d;
*p_rightSpeedSet = (int)rightVelSet.d;
//ctrlFlag
*p_crtlFlag = receiveBuff[7]; //buf[7]
USARTBufferIndex = 0;
USARTReceiverFront = 0;
Start_Flag = START;
checkSum = 0;
dataLength = 0;
j = 0;
k = 0;
}
break;
default:break;
}
}
return 0;
}
void usartSendData(short leftVel, short rightVel,short angle,unsigned char ctrlFlag)
{
unsigned char buf[13] = {0};
int i, length = 0;
leftVelNow.d = leftVel;
rightVelNow.d = rightVel;
angleNow.d = angle;
for(i = 0; i < 2; i++)
buf[i] = header[i]; // buf[0] buf[1]
length = 7;
buf[2] = length; // buf[2]
for(i = 0; i < 2; i++)
{
buf[i + 3] = leftVelNow.data[i]; // buf[3] buf[4]
buf[i + 5] = rightVelNow.data[i]; // buf[5] buf[6]
buf[i + 7] = angleNow.data[i]; // buf[7] buf[8]
}
buf[3 + length - 1] = ctrlFlag; // buf[9]
buf[3 + length] = getCrc8(buf, 3 + length); // buf[10]
buf[3 + length + 1] = ender[0]; // buf[11]
buf[3 + length + 2] = ender[1]; // buf[12]
USART_Send_String(buf,sizeof(buf));
}
void USART_Send_String(u8 *p,u16 sendSize)
{
static int length =0;
while(length<sendSize)
{
while( !(USART1->SR&(0x01<<7)) );
USART1->DR=*p;
p++;
length++;
}
length =0;
}
unsigned char getCrc8(unsigned char *ptr, unsigned short len)
{
unsigned char crc;
unsigned char i;
crc = 0;
while(len--)
{
crc ^= *ptr++;
for(i = 0; i < 8; i++)
{
if(crc&0x01)
crc=(crc>>1)^0x8C;
else
crc >>= 1;
}
}
return crc;
}
2、ROS测试功能包文件结构
主要包括:
(1)通信协议以及串口配置程序文件mbot_linux_serial.cpp
(2)系统结构测试主程序文件publish_node.cpp
(3)一个基础ROS功能包具备的其他程序文件

ROS与STM32串口通信测试功能包程序详解
publish_node.cpp文件
//包含ros库下的ros.h头文件
#include "ros/ros.h"
//包含std_msgs库下的String.h头文件
#include "std_msgs/String.h"
//包含mbot_linux_serial.h头文件
#include "mbot_linux_serial.h"
//测试发送数据两
double testSend1=5555.0;
double testSend2=2222.0;
unsigned char testSend3=0x07;
//测试接受数据变量
double testRece1=0.0;
double testRece2=0.0;
double testRece3=0.0;
unsigned char testRece4=0x00;
int main(int agrc,char **argv)
{
//创建一个ros节点,节点名称为public_node
ros::init(agrc,argv,"public_node");
//创建句柄,用于管理节点信息
ros::NodeHandle nh;
//设置频率,10HZ
ros::Rate loop_rate(10);
//串口初始化,相关定义在mbot_linux_serial.cpp有描述
serialInit();
/*
ros::ok()在不进行任何操作时,就相当于返回True,只有在以下几种情况下会变成返回False
(1)运行终端时,按下Ctrl-C时
(2)我们被一个同名同姓的节点从网络中踢出。
(3)ros::shutdown()被应用程序的另一部分调用。
(4)所有的ros::NodeHandles都被销毁了。
*/
while(ros::ok())
{
/*
ros::spinOnce()和ros::spin()是ros消息回调处理函数
ros消息回调处理函数原理:如果你的程序写了相关的消息订阅函数,那么程序在执行过程中,除了主程序以外,ROS还会自动在后台按照你规定的格式,接受订阅的消息,但是所接到的消息并不是立刻就被处理,而是必须要等到ros::spin()或ros::spinOnce()执行的时候才被调用
他们的区别在于ros::spinOnce调用后会继续执行其后面的语句,而ros::spin()则在调用后不会继续执行其后面的语句
*/
ros::spinOnce();
//向STM32端发送数据,前两个为double类型,最后一个为unsigned char类型,其函数相关定义在mbot_linux_serial.cpp有描述
writeSpeed(testSend1,testSend2,testSend3);
//从STM32接收数据,输入参数依次转化为小车的线速度、角速度、航向角(角度)、预留控制位,其函数相关定义在mbot_linux_serial.cpp有描述
readSpeed(testRece1,testRece2,testRece3,testRece4);
//打印数据
ROS_INFO("%f,%f,%f,%d\n",testRece1,testRece2,testRece3,testRece4);
//等待100ms的时间
loop_rate.sleep();
}
return 0;
}
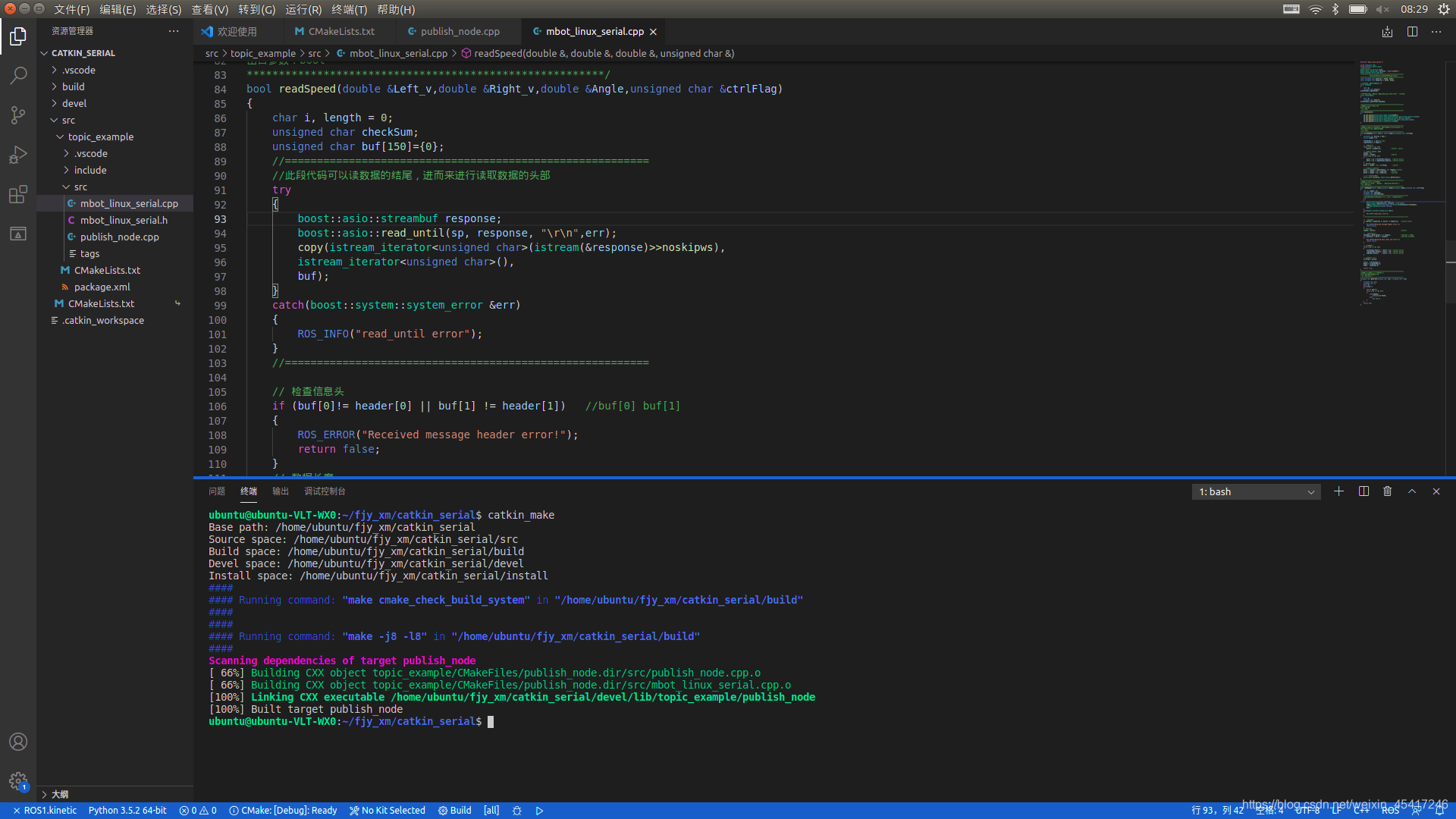
mbot_linux_serial.cpp文件
//包含对应头文件
#include "mbot_linux_serial.h"
using namespace std;//设定工作空间的名称
using namespace boost::asio;//设定工作空间的名称
//串口相关对象
//创建一个 io_service实例
boost::asio::io_service iosev;
//构造一个串口,将"/dev/ttySUB0"转移给实例iosev
boost::asio::serial_port sp(iosev, "/dev/ttyUSB0");
boost::system::error_code err;
/********************************************************
串口发送接收相关常量、变量、共用体对象
********************************************************/
const unsigned char ender[2] = {0x0d, 0x0a};//数据尾
const unsigned char header[2] = {0x55, 0xaa};//数据头
//发送左右轮速控制速度共用体
union sendData
{
short d;
unsigned char data[2];
}leftVelSet,rightVelSet;
//接收数据(左轮速、右轮速、角度)共用体(-32767 - +32768)
union receiveData
{
short d;
unsigned char data[2];
}leftVelNow,rightVelNow,angleNow;
/********************************************************
函数功能:串口参数初始化
入口参数:无
出口参数:
********************************************************/
void serialInit()
{
sp.set_option(serial_port::baud_rate(115200));//设置波特率
sp.set_option(serial_port::flow_control(serial_port::flow_control::none));//流量控制
sp.set_option(serial_port::parity(serial_port::parity::none));//奇偶校验
sp.set_option(serial_port::stop_bits(serial_port::stop_bits::one));//停止位
sp.set_option(serial_port::character_size(8)); //字符大小
}
/********************************************************
函数功能:将对机器人的左右轮子控制速度,打包发送给下位机
入口参数:机器人线速度、角速度
出口参数:
********************************************************/
void writeSpeed(double Left_v, double Right_v,unsigned char ctrlFlag)
{
unsigned char buf[11] = {0};//
int i, length = 0;
leftVelSet.d = Left_v;//mm/s
rightVelSet.d = Right_v;
// 设置消息头
for(i = 0; i < 2; i++)
buf[i] = header[i]; //buf[0] buf[1]
// 设置机器人左右轮速度
length = 5;
buf[2] = length; //buf[2]
for(i = 0; i < 2; i++)
{
buf[i + 3] = leftVelSet.data[i]; //buf[3] buf[4]
buf[i + 5] = rightVelSet.data[i]; //buf[5] buf[6]
}
// 预留控制指令
buf[3 + length - 1] = ctrlFlag; //buf[7]
// 设置校验值、消息尾
buf[3 + length] = getCrc8(buf, 3 + length);//buf[8]
buf[3 + length + 1] = ender[0]; //buf[9]
buf[3 + length + 2] = ender[1]; //buf[10]
// 通过串口下发数据
boost::asio::write(sp, boost::asio::buffer(buf));
}
/********************************************************
函数功能:从下位机读取数据
入口参数:机器人左轮轮速、右轮轮速、角度,预留控制位
出口参数:bool
********************************************************/
bool readSpeed(double &Left_v,double &Right_v,double &Angle,unsigned char &ctrlFlag)
{
char i, length = 0;
unsigned char checkSum;
unsigned char buf[150]={0};
//=========================================================
//此段代码可以读数据的结尾,进而来进行读取数据的头部
try
{
boost::asio::streambuf response;
boost::asio::read_until(sp, response, "\r\n",err);
copy(istream_iterator<unsigned char>(istream(&response)>>noskipws),
istream_iterator<unsigned char>(),
buf);
}
catch(boost::system::system_error &err)
{
ROS_INFO("read_until error");
}
//=========================================================
// 检查信息头
if (buf[0]!= header[0] || buf[1] != header[1]) //buf[0] buf[1]
{
ROS_ERROR("Received message header error!");
return false;
}
// 数据长度
length = buf[2]; //buf[2]
// 检查信息校验值
checkSum = getCrc8(buf, 3 + length); //buf[10] 计算得出
if (checkSum != buf[3 + length]) //buf[10] 串口接收
{
ROS_ERROR("Received data check sum error!");
return false;
}
// 读取速度值
for(i = 0; i < 2; i++)
{
leftVelNow.data[i] = buf[i + 3]; //buf[3] buf[4]
rightVelNow.data[i] = buf[i + 5]; //buf[5] buf[6]
angleNow.data[i] = buf[i + 7]; //buf[7] buf[8]
}
// 读取控制标志位
ctrlFlag = buf[9];
Left_v =leftVelNow.d;
Right_v =rightVelNow.d;
Angle =angleNow.d;
return true;
}
/********************************************************
函数功能:获得8位循环冗余校验值
入口参数:数组地址、长度
出口参数:校验值
********************************************************/
unsigned char getCrc8(unsigned char *ptr, unsigned short len)
{
unsigned char crc;
unsigned char i;
crc = 0;
while(len--)
{
crc ^= *ptr++;
for(i = 0; i < 8; i++)
{
if(crc&0x01)
crc=(crc>>1)^0x8C;
else
crc >>= 1;
}
}
return crc;
}
mbot_linux_serial.h文件
//类似stm32程序头文件的编写规则
#ifndef MBOT_LINUX_SERIAL_H
#define MBOT_LINUX_SERIAL_H
#include <ros/ros.h>
#include <ros/time.h>
#include <geometry_msgs/TransformStamped.h>
#include <tf/transform_broadcaster.h>
#include <nav_msgs/Odometry.h>
#include <boost/asio.hpp>
#include <geometry_msgs/Twist.h>
extern void serialInit();
extern void writeSpeed(double Left_v, double Right_v,unsigned char ctrlFlag);
extern bool readSpeed(double &Left_v,double &Right_v,double &Angle,unsigned char &ctrlFlag);
unsigned char getCrc8(unsigned char *ptr, unsigned short len);
#endif
三、ROS与STM32串口通信实验及运行效果
在STM32端,下载测试工程文件后,打开keil5软件,对程序进行编译烧录;在ROS端,打开vscode软件,在/home/ubuntu/fjy_xm路径下创建catkin_serial/src文件,对工作空间进行编译,并在/catkin_serial/src文件加下添加topic_example功能包,再进行工作空间的编译,并设置环境变量source devel/setup.bash
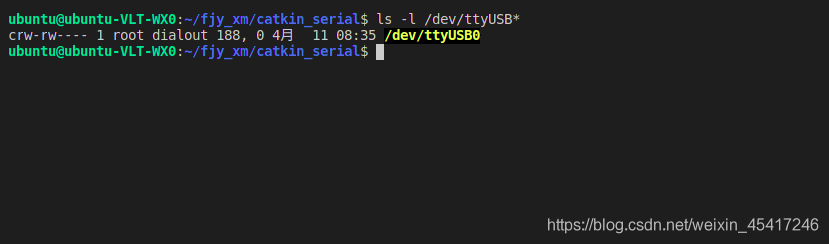
将TTY转USB模块按照对应的连接关系分别与STM32和ROS端相连,确保设备连接好之后,上电,首先需要查看以下串口设备,显示如下,说明设备之间连接正常
#查看串口设备
ls -l /dev/ttyUSB*
其次,为串口添加超级用户权限
#添加设备权限
sudo chmod 777 /dev/ttyUSB0
然后,新建一个终端 ,启动rosmaster,即在终端中输入roscore
在原终端下运行publish_node节点
rosrun topic_example publish_node
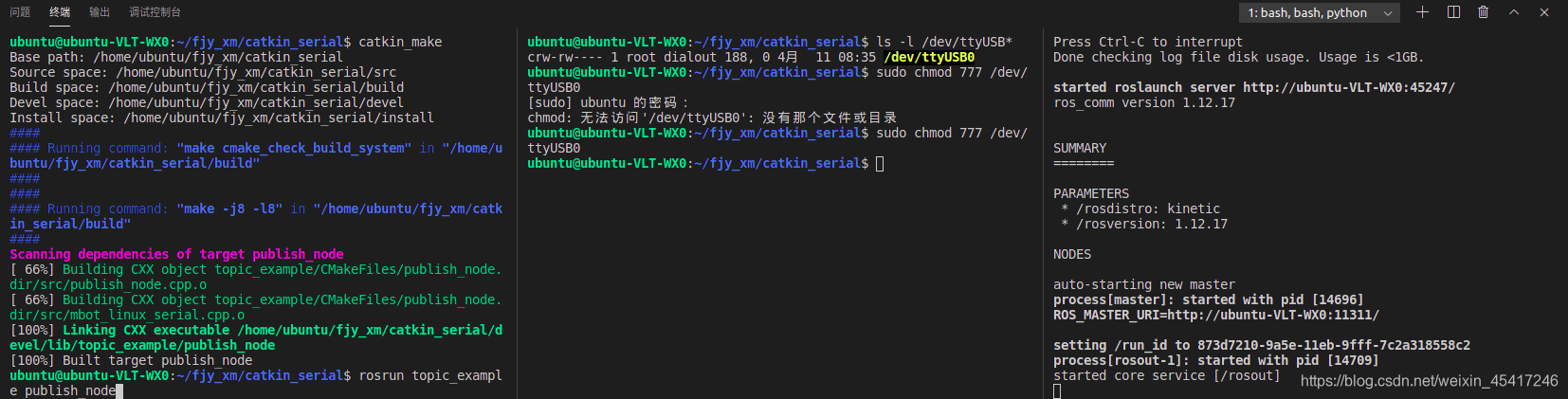
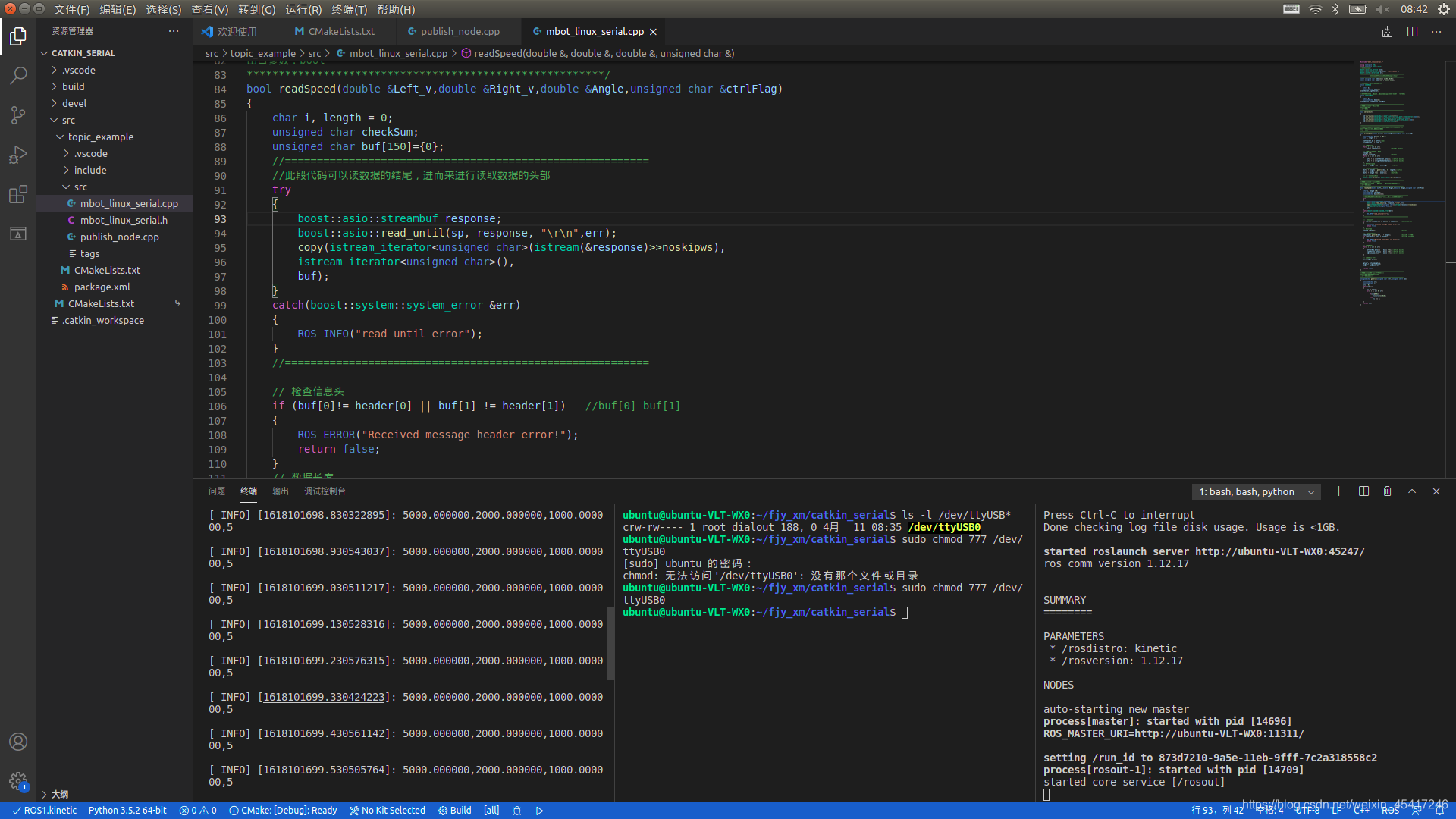
ROS端正常接收到STM32端发送过来的信息,stm32查看ROS端发送过来的信息,可以在串口调试助手上进行查看,这样,我们就完成了一个简单的ROS与STM32之间的串口通信,为我们的ROS操作系统的开发提供了些许帮助














 928
928











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









