









前言:
根据README.md里面的说明,对于2D Pose SLAM部分的example学习记录。
一、LocalizationExample.cpp
比较简单的一个例子:
在二维平面上有一个移动机器人,有它移动3个点时记录下来的gps数据,和这三个点之间的odometry的数据。然后给定一个错误的初值,最后求得结果和前面设置的gps数据对比。
unaryFactor设置
// Before we begin the example, we must create a custom unary factor to implement a
// "GPS-like" functionality. Because standard GPS measurements provide information
// only on the position, and not on the orientation, we cannot use a simple prior to
// properly model this measurement.
就是说用标准的gps是只有position坐标,没有orientation信息,所以就需要创建一个unaryFactor类。
具体代码如下:
class UnaryFactor: public NoiseModelFactor1<Pose2> {
// The factor will hold a measurement consisting of an (X,Y) location
// We could this with a Point2 but here we just use two doubles
double mx_, my_;
public:
/// shorthand for a smart pointer to a factor
typedef boost::shared_ptr<UnaryFactor> shared_ptr;
// The constructor requires the variable key, the (X, Y) measurement value, and the noise model
UnaryFactor(Key j, double x, double y, const SharedNoiseModel& model):
NoiseModelFactor1<Pose2>(model, j), mx_(x), my_(y) {}
virtual ~UnaryFactor() {}
// Using the NoiseModelFactor1 base class there are two functions that must be overridden.
// The first is the 'evaluateError' function. This function implements the desired measurement
// function, returning a vector of errors when evaluated at the provided variable value. It
// must also calculate the Jacobians for this measurement function, if requested.
Vector evaluateError(const Pose2& q, boost::optional<Matrix&> H = boost::none) const
{
// The measurement function for a GPS-like measurement is simple:
// error_x = pose.x - measurement.x
// error_y = pose.y - measurement.y
// Consequently, the Jacobians are:
// [ derror_x/dx derror_x/dy derror_x/dtheta ] = [1 0 0]
// [ derror_y/dx derror_y/dy derror_y/dtheta ] = [0 1 0]
if (H) (*H) = (Matrix(2,3) << 1.0,0.0,0.0, 0.0,1.0,0.0).finished();
return (Vector(2) << q.x() - mx_, q.y() - my_).finished();
}
// The second is a 'clone' function that allows the factor to be copied. Under most
// circumstances, the following code that employs the default copy constructor should
// work fine.
virtual gtsam::NonlinearFactor::shared_ptr clone() const {
return boost::static_pointer_cast<gtsam::NonlinearFactor>(
gtsam::NonlinearFactor::shared_ptr(new UnaryFactor(*this))); }
// Additionally, we encourage you the use of unit testing your custom factors,
// (as all GTSAM factors are), in which you would need an equals and print, to satisfy the
// GTSAM_CONCEPT_TESTABLE_INST(T) defined in Testable.h, but these are not needed below.
}; // UnaryFactor比较简单,值得注意的是如果要继承NoiseModelFactor1,需要override两个函数evaluateError和clone。
具体执行过程:
int main(int argc, char** argv) {
// 1. Create a factor graph container and add factors to it
NonlinearFactorGraph graph;
// 2a. Add odometry factors
// For simplicity, we will use the same noise model for each odometry factor
noiseModel::Diagonal::shared_ptr odometryNoise = noiseModel::Diagonal::Sigmas(Vector3(0.2, 0.2, 0.1));
// Create odometry (Between) factors between consecutive poses
graph.emplace_shared<BetweenFactor<Pose2> >(1, 2, Pose2(2.0, 0.0, 0.0), odometryNoise);
graph.emplace_shared<BetweenFactor<Pose2> >(2, 3, Pose2(3.0, 0.0, 0.0), odometryNoise);
// 2b. Add "GPS-like" measurements
// We will use our custom UnaryFactor for this.
noiseModel::Diagonal::shared_ptr unaryNoise = noiseModel::Diagonal::Sigmas(Vector2(0.1, 0.1)); // 10cm std on x,y
graph.emplace_shared<UnaryFactor>(1, 0.0, 0.0, unaryNoise);
graph.emplace_shared<UnaryFactor>(2, 2.0, 0.0, unaryNoise);
graph.emplace_shared<UnaryFactor>(3, 5.0, 0.0, unaryNoise);
graph.print("\nFactor Graph:\n"); // print
// 3. Create the data structure to hold the initialEstimate estimate to the solution
// For illustrative purposes, these have been deliberately set to incorrect values
Values initialEstimate;
initialEstimate.insert(1, Pose2(0.5, 0.0, 0.2));
initialEstimate.insert(2, Pose2(2.3, 0.1, -0.2));
initialEstimate.insert(3, Pose2(4.1, 0.1, 0.1));
initialEstimate.print("\nInitial Estimate:\n"); // print
// 4. Optimize using Levenberg-Marquardt optimization. The optimizer
// accepts an optional set of configuration parameters, controlling
// things like convergence criteria, the type of linear system solver
// to use, and the amount of information displayed during optimization.
// Here we will use the default set of parameters. See the
// documentation for the full set of parameters.
LevenbergMarquardtOptimizer optimizer(graph, initialEstimate);
Values result = optimizer.optimize();
result.print("Final Result:\n");
// 5. Calculate and print marginal covariances for all variables
Marginals marginals(graph, result);
cout << "x1 covariance:\n" << marginals.marginalCovariance(1) << endl;
cout << "x2 covariance:\n" << marginals.marginalCovariance(2) << endl;
cout << "x3 covariance:\n" << marginals.marginalCovariance(3) << endl;
return 0;
}第一步创建graph;
第二步往graph里面添加odometry factor,添加GPS-like的factor;
第三步设置Values,初值initialEstimate,添加一些数;
第四步选择优化器,优化并输出结果。
结果:
Factor Graph:
size: 5
Factor 0: BetweenFactor(1,2)
measured: (2, 0, 0)
noise model: diagonal sigmas[0.2; 0.2; 0.1];
Factor 1: BetweenFactor(2,3)
measured: (3, 0, 0)
noise model: diagonal sigmas[0.2; 0.2; 0.1];
Factor 2: keys = { 1 }
isotropic dim=2 sigma=0.1
Factor 3: keys = { 2 }
isotropic dim=2 sigma=0.1
Factor 4: keys = { 3 }
isotropic dim=2 sigma=0.1
Initial Estimate:
Values with 3 values:
Value 1: (N5gtsam5Pose2E) (0.5, 0, 0.2)
Value 2: (N5gtsam5Pose2E) (2.3, 0.1, -0.2)
Value 3: (N5gtsam5Pose2E) (4.1, 0.1, 0.1)
Final Result:
Values with 3 values:
Value 1: (N5gtsam5Pose2E) (-1.34728301e-14, 1.16725243e-15, -1.64808921e-16)
Value 2: (N5gtsam5Pose2E) (2, 2.17285499e-16, -7.22571183e-17)
Value 3: (N5gtsam5Pose2E) (5, -2.19538393e-16, -7.00766967e-17)
x1 covariance:
0.00828571429 2.76564799e-19 -7.47383061e-19
2.76564799e-19 0.00928571429 -0.00261904762
-7.47383061e-19 -0.00261904762 0.00706349206
x2 covariance:
0.00714285714 1.61131272e-19 1.17630708e-19
1.61131272e-19 0.00801587302 -0.00134920635
1.17630708e-19 -0.00134920635 0.00468253968
x3 covariance:
0.00828571429 1.35379321e-19 2.35144668e-19
1.35379321e-19 0.00968253968 0.00253968254
2.35144668e-19 0.00253968254 0.0146825397可以看出,虽然在添加odometry和gps factor中添加了nosiy,但最后输出的结果是符合真实值的。
二、Pose2SLAMExample.cpp
这个内容很简单,有一个2d平面,然后机器人在里面运行,记录了5个点之间的里程计信息。通过优化,求解它们相对于第一个点的坐标信息。
就是这个图的意思。
第一步:创建graph
// 1. Create a factor graph container and add factors to it
NonlinearFactorGraph graph;第二步:创建factor
// 2a. Add a prior on the first pose, setting it to the origin
// A prior factor consists of a mean and a noise model (covariance matrix)
noiseModel::Diagonal::shared_ptr priorNoise = noiseModel::Diagonal::Sigmas(Vector3(0.3, 0.3, 0.1));
graph.emplace_shared<PriorFactor<Pose2> >(1, Pose2(0, 0, 0), priorNoise);
// For simplicity, we will use the same noise model for odometry and loop closures
noiseModel::Diagonal::shared_ptr model = noiseModel::Diagonal::Sigmas(Vector3(0.2, 0.2, 0.1));
// 2b. Add odometry factors
// Create odometry (Between) factors between consecutive poses
graph.emplace_shared<BetweenFactor<Pose2> >(1, 2, Pose2(2, 0, 0 ), model);
graph.emplace_shared<BetweenFactor<Pose2> >(2, 3, Pose2(2, 0, M_PI_2), model);
graph.emplace_shared<BetweenFactor<Pose2> >(3, 4, Pose2(2, 0, M_PI_2), model);
graph.emplace_shared<BetweenFactor<Pose2> >(4, 5, Pose2(2, 0, M_PI_2), model);
// 2c. Add the loop closure constraint
// This factor encodes the fact that we have returned to the same pose. In real systems,
// these constraints may be identified in many ways, such as appearance-based techniques
// with camera images. We will use another Between Factor to enforce this constraint:
graph.emplace_shared<BetweenFactor<Pose2> >(5, 2, Pose2(2, 0, M_PI_2), model);
graph.print("\nFactor Graph:\n"); // print包括创建第一个因子和回环限制因子。
第三步:创建初值,并确定输出的数据类型和初值的格式一样。
// 3. Create the data structure to hold the initialEstimate estimate to the solution
// For illustrative purposes, these have been deliberately set to incorrect values
Values initialEstimate;
initialEstimate.insert(1, Pose2(0.5, 0.0, 0.2 ));
initialEstimate.insert(2, Pose2(2.3, 0.1, -0.2 ));
initialEstimate.insert(3, Pose2(4.1, 0.1, M_PI_2));
initialEstimate.insert(4, Pose2(4.0, 2.0, M_PI ));
initialEstimate.insert(5, Pose2(2.1, 2.1, -M_PI_2));
initialEstimate.print("\nInitial Estimate:\n"); // print第四步:优化
// 4. Optimize the initial values using a Gauss-Newton nonlinear optimizer
// The optimizer accepts an optional set of configuration parameters,
// controlling things like convergence criteria, the type of linear
// system solver to use, and the amount of information displayed during
// optimization. We will set a few parameters as a demonstration.
GaussNewtonParams parameters;
// Stop iterating once the change in error between steps is less than this value
parameters.relativeErrorTol = 1e-5;
// Do not perform more than N iteration steps
parameters.maxIterations = 100;
// Create the optimizer ...
GaussNewtonOptimizer optimizer(graph, initialEstimate, parameters);
// ... and optimize
Values result = optimizer.optimize();
result.print("Final Result:\n");与之前不同的是,多了对于优化器参数的设置部分。
第五步:查看方差
// 5. Calculate and print marginal covariances for all variables
cout.precision(3);
Marginals marginals(graph, result);
cout << "x1 covariance:\n" << marginals.marginalCovariance(1) << endl;
cout << "x2 covariance:\n" << marginals.marginalCovariance(2) << endl;
cout << "x3 covariance:\n" << marginals.marginalCovariance(3) << endl;
cout << "x4 covariance:\n" << marginals.marginalCovariance(4) << endl;
cout << "x5 covariance:\n" << marginals.marginalCovariance(5) << endl;简单明了,最容易理解的就是这个。
结果:
Final Result:
Values with 5 values:
Value 1: (N5gtsam5Pose2E) (-1.27455483e-20, 8.10527674e-20, 3.07189987e-20)
Value 2: (N5gtsam5Pose2E) (2, 1.78514217e-19, 4.34262714e-20)
Value 3: (N5gtsam5Pose2E) (4, -3.42173202e-11, 1.57079633)
Value 4: (N5gtsam5Pose2E) (4, 2, 3.14159265)
Value 5: (N5gtsam5Pose2E) (2, 2, -1.57079633)三、Pose2SLAMExampleExpressions.cpp
这个和二的Pose2SLAMExample.cpp区别不大,主要的区别是使用:
// Create Expressions for unknowns
Pose2_ x1(1), x2(2), x3(3), x4(4), x5(5);来代替了Pose2SLAMExample.cpp里面的数字1,2,3,4,5。
以及ExpressionFactorGraph来替代了NonlinearFactorGraph。
ExpressionFactorGraph graph;结果都一样:
Final Result:
Values with 5 values:
Value 1: (N5gtsam5Pose2E) (1.49017327e-20, -2.14141805e-20, -4.58273596e-21)
Value 2: (N5gtsam5Pose2E) (2, -4.0097066e-20, -4.40676513e-21)
Value 3: (N5gtsam5Pose2E) (4, -4.9189295e-12, 1.57079633)
Value 4: (N5gtsam5Pose2E) (4, 2, -3.14159265)
Value 5: (N5gtsam5Pose2E) (2, 2, -1.57079633)四、Pose2SLAMExample_g2o.cpp
读取g2o文件的内容然后直接输出计算,和前面的类似。
example中的源码部分使用了很多封装的函数比如readG2o,输入g2o文件名和3d标志位,输出已经将factor加入的graph和已经添加了的初值initial指针。
boost::tie(graph, initial) = readG2o(g2oFile,is3D);/**
* @brief This function parses a g2o file and stores the measurements into a
* NonlinearFactorGraph and the initial guess in a Values structure
* @param filename The name of the g2o file\
* @param is3D indicates if the file describes a 2D or 3D problem
* @param kernelFunctionType whether to wrap the noise model in a robust kernel
* @return graph and initial values
*/
GTSAM_EXPORT GraphAndValues readG2o(const std::string& g2oFile, const bool is3D = false,
KernelFunctionType kernelFunctionType = KernelFunctionTypeNONE);还有writeG2o函数:
/**
* @brief This function writes a g2o file from
* NonlinearFactorGraph and a Values structure
* @param filename The name of the g2o file to write
* @param graph NonlinearFactor graph storing the measurements
* @param estimate Values
*/
GTSAM_EXPORT void writeG2o(const NonlinearFactorGraph& graph,
const Values& estimate, const std::string& filename);其他部分和前面的一样,这里只是多了对于txt文件的读取和封装函数readG2o的使用。
完整源码:
#include <gtsam/slam/dataset.h>
#include <gtsam/slam/PriorFactor.h>
#include <gtsam/geometry/Pose2.h>
#include <gtsam/nonlinear/GaussNewtonOptimizer.h>
#include <fstream>
using namespace std;
using namespace gtsam;
// HOWTO: ./Pose2SLAMExample_g2o inputFile outputFile (maxIterations) (tukey/huber)
int main(const int argc, const char *argv[]) {
string kernelType = "none";
int maxIterations = 100; // default
string g2oFile = findExampleDataFile("noisyToyGraph.txt"); // default
// Parse user's inputs
if (argc > 1){
g2oFile = argv[1]; // input dataset filename
// outputFile = g2oFile = argv[2]; // done later
}
if (argc > 3){
maxIterations = atoi(argv[3]); // user can specify either tukey or huber
}
if (argc > 4){
kernelType = argv[4]; // user can specify either tukey or huber
}
// reading file and creating factor graph
NonlinearFactorGraph::shared_ptr graph;
Values::shared_ptr initial;
bool is3D = false;
if(kernelType.compare("none") == 0){
boost::tie(graph, initial) = readG2o(g2oFile,is3D);
}
if(kernelType.compare("huber") == 0){
std::cout << "Using robust kernel: huber " << std::endl;
boost::tie(graph, initial) = readG2o(g2oFile,is3D, KernelFunctionTypeHUBER);
}
if(kernelType.compare("tukey") == 0){
std::cout << "Using robust kernel: tukey " << std::endl;
boost::tie(graph, initial) = readG2o(g2oFile,is3D, KernelFunctionTypeTUKEY);
}
// Add prior on the pose having index (key) = 0
NonlinearFactorGraph graphWithPrior = *graph;
noiseModel::Diagonal::shared_ptr priorModel = //
noiseModel::Diagonal::Variances(Vector3(1e-6, 1e-6, 1e-8));
graphWithPrior.add(PriorFactor<Pose2>(0, Pose2(), priorModel));
std::cout << "Adding prior on pose 0 " << std::endl;
graphWithPrior.print("\nFactor Graph:\n");
GaussNewtonParams params;
params.setVerbosity("TERMINATION");
if (argc > 3) {
params.maxIterations = maxIterations;
std::cout << "User required to perform maximum " << params.maxIterations << " iterations "<< std::endl;
}
std::cout << "initial data: " << std::endl;
(*initial).print("\nInitial Estimate:\n");
std::cout << "Optimizing the factor graph" << std::endl;
GaussNewtonOptimizer optimizer(graphWithPrior, *initial, params);
Values result = optimizer.optimize();
std::cout << "Optimization complete" << std::endl;
// std::cout << "initial error=" <<graph->error(*initial)<< std::endl;
// std::cout << "final error=" <<graph->error(result)<< std::endl;
if (argc < 3) {
result.print("result");
} else {
const string outputFile = argv[2];
std::cout << "Writing results to file: " << outputFile << std::endl;
NonlinearFactorGraph::shared_ptr graphNoKernel;
Values::shared_ptr initial2;
boost::tie(graphNoKernel, initial2) = readG2o(g2oFile);
writeG2o(*graphNoKernel, result, outputFile);
std::cout << "done! " << std::endl;
}
return 0;
}
原始部分没有对于加入graph的输出和初值initial的输出提示,我加了进去。
输出结果:
Factor Graph:
size: 6
Factor 0: BetweenFactor(0,1)
measured: (0.774115, 1.18339, 1.57617)
noise model: unit (3)
Factor 1: BetweenFactor(1,2)
measured: (0.869231, 1.03188, 1.57942)
noise model: unit (3)
Factor 2: BetweenFactor(2,3)
measured: (1.35784, 1.03426, 1.56646)
noise model: unit (3)
Factor 3: BetweenFactor(2,0)
measured: (0.303492, 1.86501, -3.1139)
noise model: unit (3)
Factor 4: BetweenFactor(0,3)
measured: (-0.928526, 0.993695, -1.56354)
noise model: unit (3)
Factor 5: PriorFactor on 0
prior mean: (0, 0, 0)
noise model: diagonal sigmas[0.001; 0.001; 0.0001];
initial data:
Initial Estimate:
Values with 4 values:
Value 0: (N5gtsam5Pose2E) (0, 0, 0)
Value 1: (N5gtsam5Pose2E) (0.774115, 1.183389, 1.576173)
Value 2: (N5gtsam5Pose2E) (-0.26242, 2.047059, -3.127594)
Value 3: (N5gtsam5Pose2E) (-1.605649, 0.993891, -1.561134)
Optimizing the factor graph
Warning: stopping nonlinear iterations because error increased
errorThreshold: 0.0685034665 <? 0
absoluteDecrease: -2.28853697639e-05 <? 1e-05
relativeDecrease: -0.000334187727181 <? 1e-05
iterations: 3 >? 100
Optimization complete
resultValues with 4 values:
Value 0: (N5gtsam5Pose2E) (-7.53875248522e-23, -3.04401700725e-24, 1.41745664019e-24)
Value 1: (N5gtsam5Pose2E) (0.956178940406, 1.14319822891, 1.54150026689)
Value 2: (N5gtsam5Pose2E) (0.126611466178, 1.9817945338, -3.08397402066)
Value 3: (N5gtsam5Pose2E) (-1.05038303244, 0.935131621066, -1.54052801033)然后,我根据Pose2SLAMExampleExpressions.cpp的内容,使用这个noisyToyGraph.txt文件的内容,写了个类似的,手动输入值。
#include <gtsam/slam/expressions.h>
#include <gtsam/nonlinear/ExpressionFactorGraph.h>
#include <gtsam/slam/PriorFactor.h>
#include <gtsam/slam/BetweenFactor.h>
#include <gtsam/geometry/Pose2.h>
#include <gtsam/nonlinear/GaussNewtonOptimizer.h>
#include <gtsam/nonlinear/Marginals.h>
using namespace std;
using namespace gtsam;
int main(int argc, char** argv)
{
ExpressionFactorGraph graph;
Pose2_ x1(1), x2(2), x3(3), x4(4);
noiseModel::Diagonal::shared_ptr priorNoise = noiseModel::Diagonal::Sigmas(Vector3(0.3, 0.3, 0.1));
graph.addExpressionFactor(x1, Pose2(0, 0, 0), priorNoise);
noiseModel::Diagonal::shared_ptr model = noiseModel::Diagonal::Sigmas(Vector3(0.2, 0.2, 0.1));
graph.addExpressionFactor(between(x1,x2), Pose2(0.774115, 1.183389, 1.576173), model);
graph.addExpressionFactor(between(x2,x3), Pose2(0.869231, 1.031877, 1.579418), model);
graph.addExpressionFactor(between(x3,x4), Pose2(1.357840, 1.034262, 1.566460), model);
graph.addExpressionFactor(between(x3,x1), Pose2(0.303492, 1.865011, -3.113898), model);
graph.addExpressionFactor(between(x1,x4), Pose2(-0.928526, 0.993695, -1.563542), model);
graph.print("\nFactor Graph:\n"); // print
Values initialEstimate;
initialEstimate.insert(1, Pose2(0.0, 0.0, 0.0 ));
initialEstimate.insert(2, Pose2(0.774115, 1.183389, 1.576173 ));
initialEstimate.insert(3, Pose2(-0.262420, 2.047059, -3.127594));
initialEstimate.insert(4, Pose2(-1.605649, 0.993891, -1.561134 ));
initialEstimate.print("\nInitial Estimate:\n"); // print
GaussNewtonParams parameters;
parameters.relativeErrorTol = 1e-5;
parameters.maxIterations = 3;
GaussNewtonOptimizer optimizer(graph, initialEstimate, parameters);
Values result = optimizer.optimize();
result.print("Final Result:\n");
return 0;
}发现它们的结果不一样,不知道是哪里出现了问题。
//我自己写的
Values with 4 values:
Value 1: (N5gtsam5Pose2E) (-2.22725181e-16, 4.72511144e-17, 2.13599316e-17)
Value 2: (N5gtsam5Pose2E) (0.986584345, 1.13382604, 1.56093936)
Value 3: (N5gtsam5Pose2E) (0.175794601, 1.96362262, -3.12403007)
Value 4: (N5gtsam5Pose2E) (-1.04609988, 0.949686099, -1.56055604)
//使用Pose2SLAMExample_g2o.cpp输出的
resultValues with 4 values:
Value 0: (N5gtsam5Pose2E) (-7.53875248522e-23, -3.04401700725e-24, 1.41745664019e-24)
Value 1: (N5gtsam5Pose2E) (0.956178940406, 1.14319822891, 1.54150026689)
Value 2: (N5gtsam5Pose2E) (0.126611466178, 1.9817945338, -3.08397402066)
Value 3: (N5gtsam5Pose2E) (-1.05038303244, 0.935131621066, -1.54052801033)五、Pose2SLAMExample_graph.cpp
主要是读取w100.graph文件内容的example,和前面没有太多的不同,有一个封装函数load2D,
boost::tie(graph, initial) = load2D(graph_file, model);输入graph_file文件和nosiy model,输出是已经将factor加入的graph和已经加入的初值initial。其它类似前面的。
六、Pose2SLAMExample_graphviz.cpp
这部分的主要内容和Pose2SLAMExample.cpp一模一样,它不同在于介绍了一个函数:
// save factor graph as graphviz dot file
// Render to PDF using "fdp Pose2SLAMExample.dot -Tpdf > graph.pdf"
ofstream os("Pose2SLAMExample.dot");
graph.saveGraph(os, result);可以将获得的结果result存放在os文件中,并通过命令:
fdp Pose2SLAMExample.dot -Tpdf > graph.pdf将它转换为PDF文件。
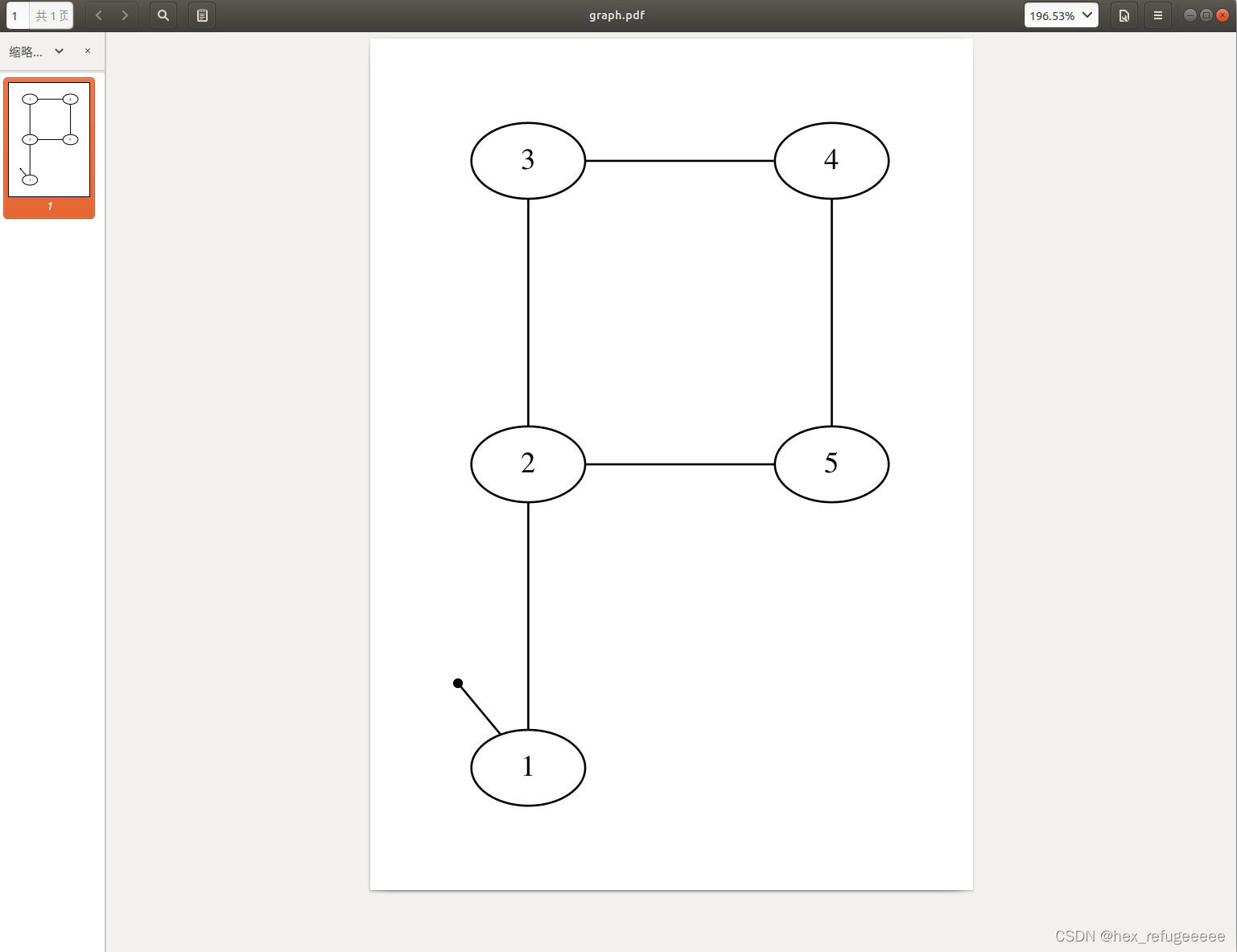
对比initial值:
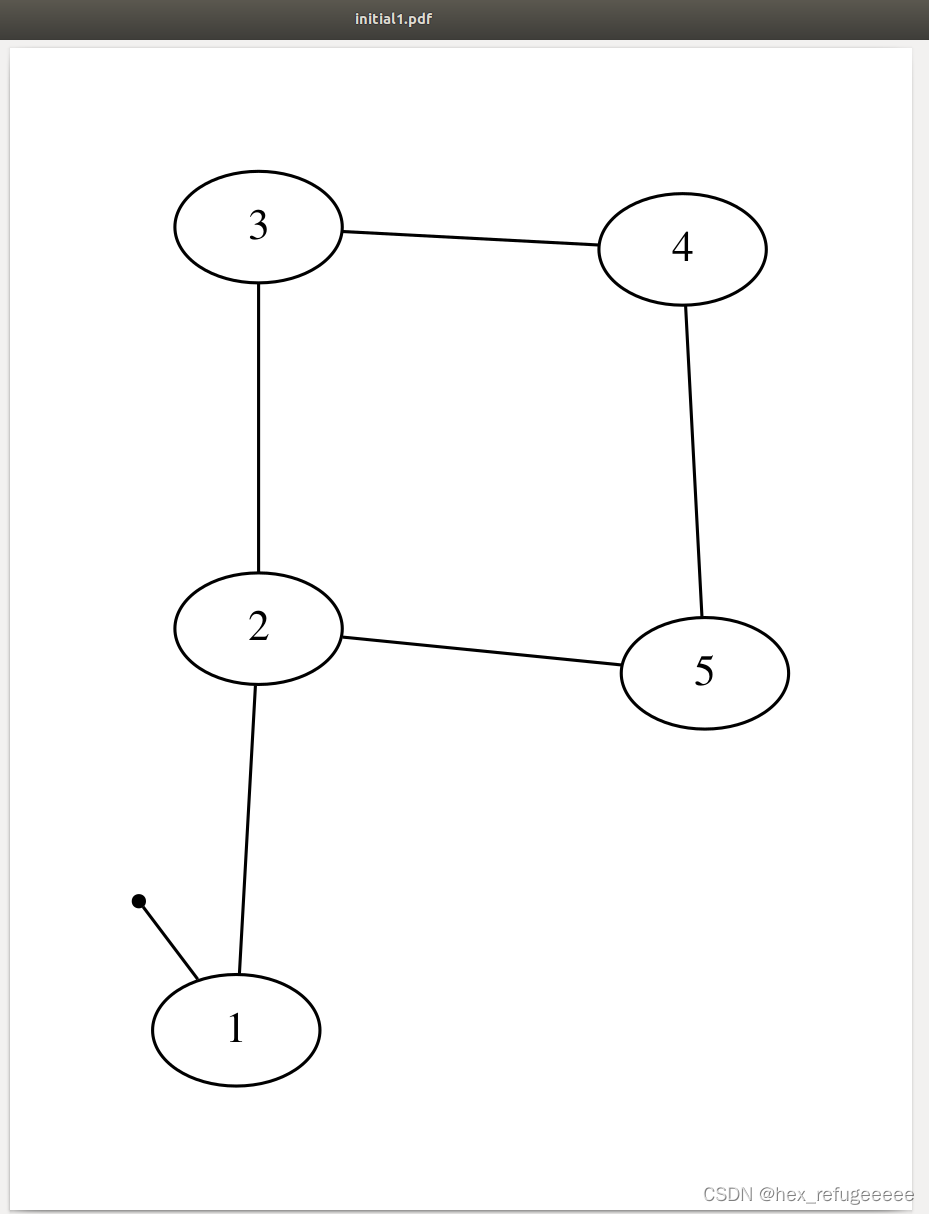
优化的效果还是很明显的。
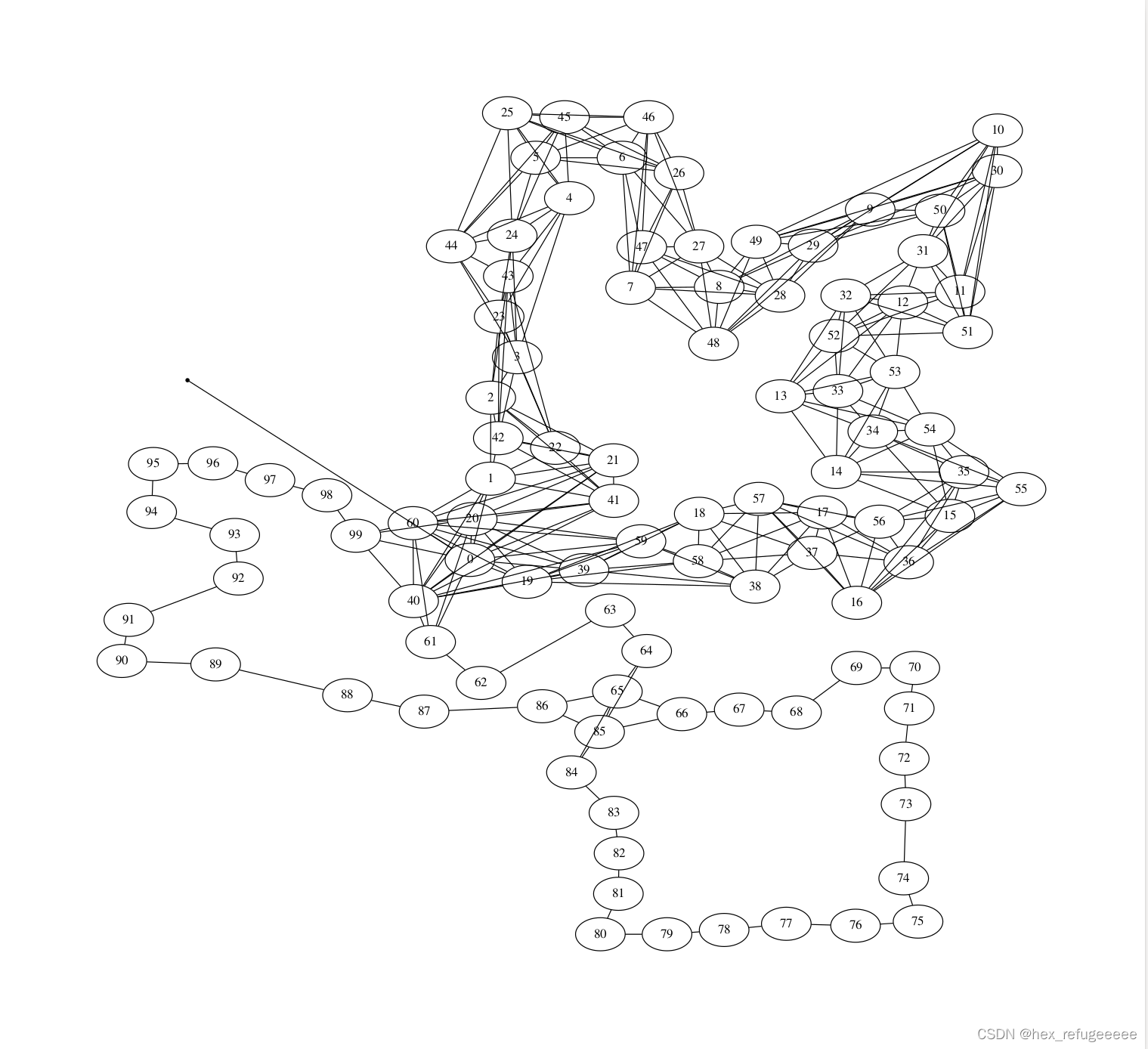
我利用这个函数和命令把前面w100.graph的优化结果也显示了一下:
七、Pose2SLAMStressTest.cpp
这个好像是创造一系列的3D poses,每个pose都加入噪声,然后就优化?
// Create N 3D poses, add relative motion between each consecutive poses. (The
// relative motion is simply a unit translation(1, 0, 0), no rotation). For each
// each pose, add some random noise to the x value of the translation part.
// Use gtsam to create a prior factor for the first pose and N-1 between factors
// and run optimization.
比较简单,对于initial部分的添加偏差值得学习一下:
std::random_device rd;
std::mt19937 e2(rd());
std::uniform_real_distribution<> dist(0, 1);
vector<Pose3> poses;
for (int i = 0; i < numberNodes; ++i) {
Matrix4 M;
double r = dist(e2);
r = (r - 0.5) / 10 + i;
M << 1, 0, 0, r, 0, 1, 0, 0, 0, 0, 1, 0, 0, 0, 0, 1;
poses.push_back(Pose3(M));
}八、Pose2SLAMwSPCG.cpp
使用了PCG solver来求解,其他内容和Pose2SLAMExample.cpp部分一样。
// 4. Single Step Optimization using Levenberg-Marquardt
LevenbergMarquardtParams parameters;
parameters.verbosity = NonlinearOptimizerParams::ERROR;
parameters.verbosityLM = LevenbergMarquardtParams::LAMBDA;
// LM is still the outer optimization loop, but by specifying "Iterative" below
// We indicate that an iterative linear solver should be used.
// In addition, the *type* of the iterativeParams decides on the type of
// iterative solver, in this case the SPCG (subgraph PCG)
parameters.linearSolverType = NonlinearOptimizerParams::Iterative;
parameters.iterativeParams = boost::make_shared<SubgraphSolverParameters>();就是使用了sub PCG的求解,具体为什么使用这个不太清楚。















 2402
2402











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









