







ROS中的常用组件(四)——rviz三维可视化平台
总述
机器人系统中存在大量数据,但是数据形态的值往往不利于开发者感受数据所描述的内容,所以常常需要将数据可视化显示。
ROS针对机器人系统的可视化需求,为用户提供了一款显示多种数据的三维可视化平台——RViz。
rviz很好的兼容了各种基于ROS软件框架的机器人平台。在rviz中,可以使用XML对机器人、周围物体等任何实物进行尺寸、质量、位置、材质、关节等属性的描述,并且在界面中呈现出来。同时,rviz还可以通过图形化的方式,实时显示机器人传感器的信息、机器人的运动状态、周围环境的变化等。
总而言之,rviz帮助开发者实现所有可监测信息的图形化显示,开发者也可以在rviz的控制界面下,通过按钮、滑动条、数值等方式,控制机器人的行为。
一、安装并运行rviz
rviz已经集成在桌面完整版的ROS中,或者可以通过如下命令进行安装:
sudo apt-get install ros-kinetic=rviz安装完成后,在终端中分别运行如下命令即可启动ROS和rviz平台:
roscore
rosrun rviz rviz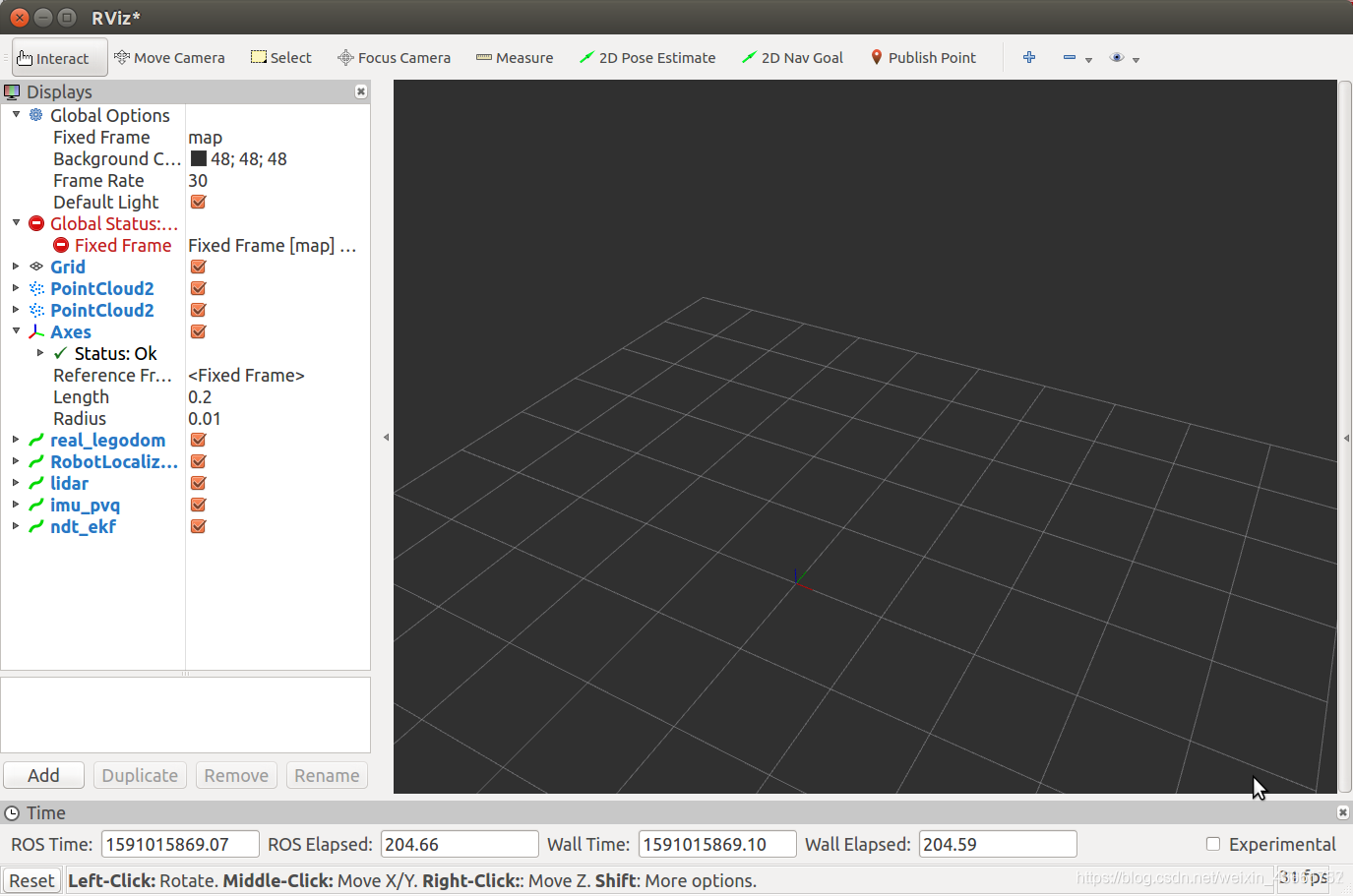
rviz主界面主要包含以下几个部分。
3D视图区:用于可视化显示数据,目前没有任何数据,所以显示黑色。
工具栏:用于提供视角控制、目标设置、发布地点等工具。
显示项列表:用于显示当前选择的显示插件,可以配置每个插件的属性。
视角设置区:用于选择多种观测视角。
时间显示区:用于显示当前的系统时间和ROS时间。
二、数据可视化
进行数据可视化的前提当然是将需要可视化的数据以对应的消息类型发布,然后我们在rviz中使用相应的插件订阅该消息即可实现显示。
1、添加显示数据的插件。点击rviz界面左侧下方的“Add”按键,rviz会将默认支持的所有数据类型的显示插件罗列出来,如图所示。
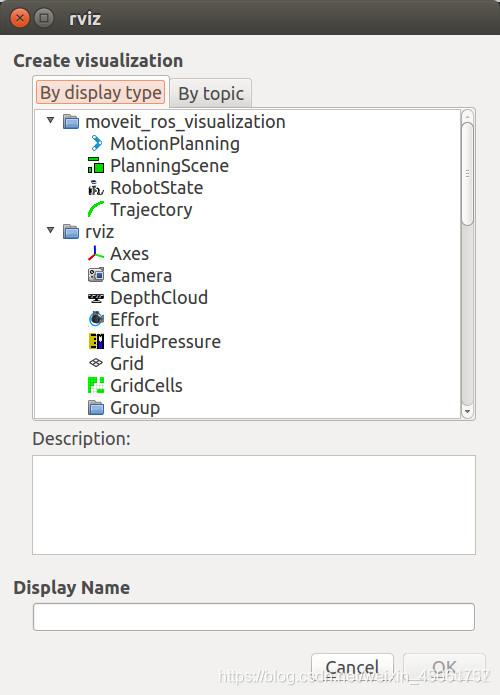
添加完成后,rviz左侧的Dispaly中会列出已经添加的显示插件;点击插件列表前的加号,可以打开一个属性列表,根据需求设置属性。一般情况下,“Topic”属性较为重要,用来声明该显示插件所订阅的数据来源,如果订阅成功,在中间的显示区应该会出现可视化后的数据。
三、插件扩展机制
rviz是一个三维可视化平台,默认可以显示如图所示的通用类型数据,其中包含坐标轴、摄像头图像、地图、激光等数据。

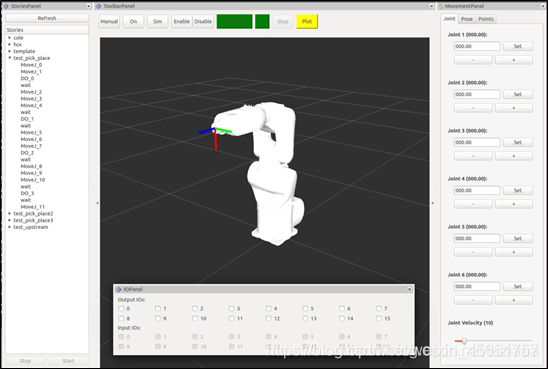
我们可以基于rviz打造一款自己的人机交互软件,例如针对机械臂控制开发一系列基于rviz的插件,可以完成类似工业机器人示教器的功能:















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











