







一、EPS分类
- C-EPS:转向管柱助力式
- P-EPS:小齿轮助力式
- R-EPS:齿条式助力式
二、EPS基本原理
各种类型EPS系统的组成和工作原理基本相同,都是由机械转向系统、扭矩传感器、车速传感器、EPS控制单元、助力电机和减速机构等组成。其结构形式的选择很大程度上取决于所需助力大小和空间布置。如下图以C-EPS系统结构示意图举例分析。
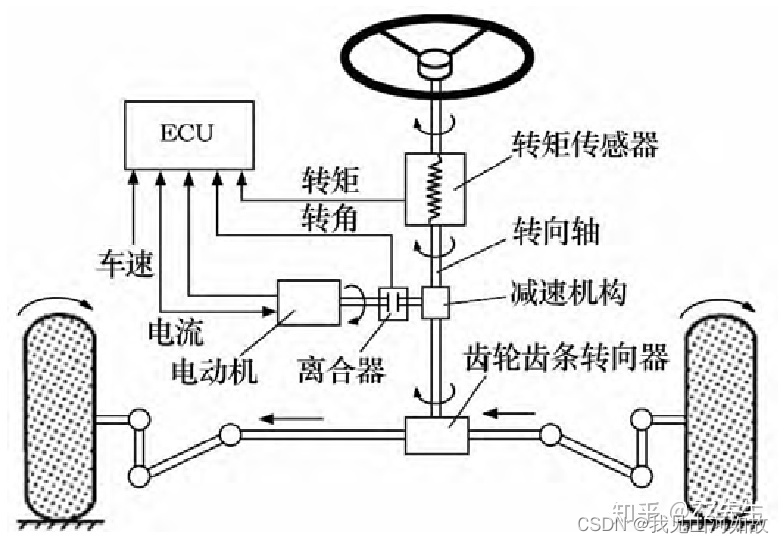
由上图分析C-EPS的助力过程:驾驶员转动方向盘时,扭杆发生变形,扭矩传感器将转向输入轴和输出轴之间的相对转角转化成电压信号传递给EPS控制单元,EPS控制单元首先根据当前的转向盘转矩和车速等信号计算助力电机目标电流的大小,然后结合检测到的实际电机电流通过电流控制算法计算得到所需的控制电压然后通过逆变器作用到助力电机上,助力电机产生的力矩通过蜗轮蜗杆减速器作用到转向输出轴上,实现助力转向的功能。
EPS系统特点:
- EPS在不同工况下都能提供最佳助力效果:低速助力大,高速调手感;
- EPS改善回正功能:主动施加回正力矩及阻尼力矩,低速快速回正,高速抑制超调和振荡;
- EPS效率高达90%;
- EPS结构紧凑;
- EPS工作的温度区间大;
- EPS易于调整和匹配;
- EPS功能扩展性好,可以与其他电控系统协调控制。
三、EPS控制策略
- 基本助力控制:基本助力控制主要是为了降低转向时驾驶员所需提供的方向盘力矩;
当汽车低速转向时,EPS系统提供充足的助力力矩辅助驾驶员完成转向操作,使转向轻便,减轻驾驶员负担;在汽车高速转向时,EPS系统提供较小的助力力矩,保证驾驶员拥有良好的路感,保障汽车行驶的稳定性。 - 回正控制:回正控制主要是为了改善装载有 EPS 系统汽车的回正性能;
虽然汽车的定位参数会有一定的被动回正作用,但是这种回正力矩不足以使EPS系统的方向盘回到中间位置,因此需要EPS系统通过主动回正控制,使方向盘自动回正。ECU通过方向盘转矩、转角及车速等输入信号,判断驾驶员的驾驶意图,若判断出方向盘处于自动回正过程,则控制助力电机提供相应助力,使方向盘平稳、快速回到中间位置。 - 阻尼控制:阻尼控制主要是为了提高汽车高速行驶时的操纵稳定性。
汽车在以较高车速行驶时,如果方向盘转速过快将会很容易引起车辆侧翻,因此需要阻尼控制对方向盘转速抑制,保证高速行驶的平稳性。且在高速行驶经过不平路面时,阻尼控制可以利用助力电机的反电动势减轻方向盘上的抖动,提高驾驶员的舒适度。
由于 EPS 系统在汽车行驶时处于基本助力控制的时间最长、最能影响驾驶体验,因此它是 EPS 系统中最主要、最关键的控制模式。

















 1536
1536











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











