









相机标定有关
相机标定牵扯到各个坐标系之间的关系和转换,看到一篇很好的文章。
OpenCV学习之世界坐标系、相机坐标系、图像坐标系和像素坐标系之间的转换关系
各个坐标系之间的关系:
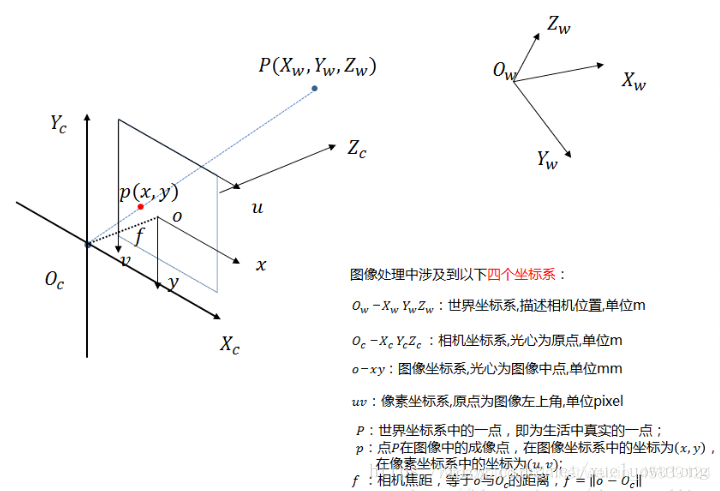
图像中的每一个像素点都对应世界坐标系下的一个点,各个坐标系之间的转换公式:
最右边的左边第一个括号为相机的内参(焦距,畸变系数),第二个括号为相机的外参(从世界坐标系转换到摄像机坐标系的旋转矩阵和平移矩阵),这些都可以通过相机标定获得。

而进行手眼标定就是为了获得相机坐标系和机器人坐标系的位置姿态转换关系。
手眼标定又分为眼在手上,眼在手外俩种不同的标定形式。















 1459
1459











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











