







一、需要有的硬件实物和软件
HT32(32位合泰单片机,以下简称HT32)
- 数据线(一定要是可以传输数据的,普通的充电线不一定可以),不知道是不是数据线的可以进行检验,参考博客
- XCOM串口助手(网上下载即可)
二、需要了解的有关串口通信的知识
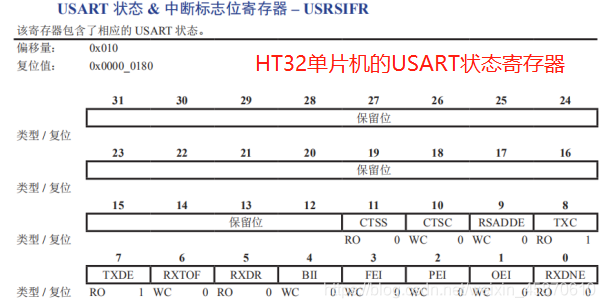
● 通用同步异步收发器 – USART
● 同时支持异步和时钟同步串行通信模式
● 异步工作频率高达 (fPCLK/16) MHz,同步工作频率高达 (fPCLK/8) MHz
● 全双工通信
● 完全可编程串行接口通信特性包括:
字长:7,8 或 9-bit 字符
校验位:奇、偶或无奇偶校验位的产生和检测
停止位:1 或 2 个停止位产生
位顺序:低位优先或高位优先传输
● 错误侦测:奇偶校验、溢出和帧错误
● 自动硬件流控制模式 – RTS、CTS
● IrDA SIR 编码器和解码器
● 具有输出使能控制的 RS485 模式
● FIFO 深度:8×9 位接收器和发送器
通用同步异步收发器 USART 提供了一个灵活的采用同步或异步传输的全双工数据交换。USART用来转换并行和串行接口之间的数据,通常也被用作 RS232 标准通信。USART 外设功能支持四种类型的中断,包括线路状态中断、发送 FIFO 空中断、接收器阈值级别到达中断和超时中断。USART 模块包括一个发送 FIFO (TX_FIFO) 和一个接收 FIFO (RX_FIFO)。通过读取线路状态寄存器LSR,软件可以检测 USART的错误状态。状态包括传输模式下的类型和状况以及因奇偶、溢出、帧和暂停事件造成的错误状况。

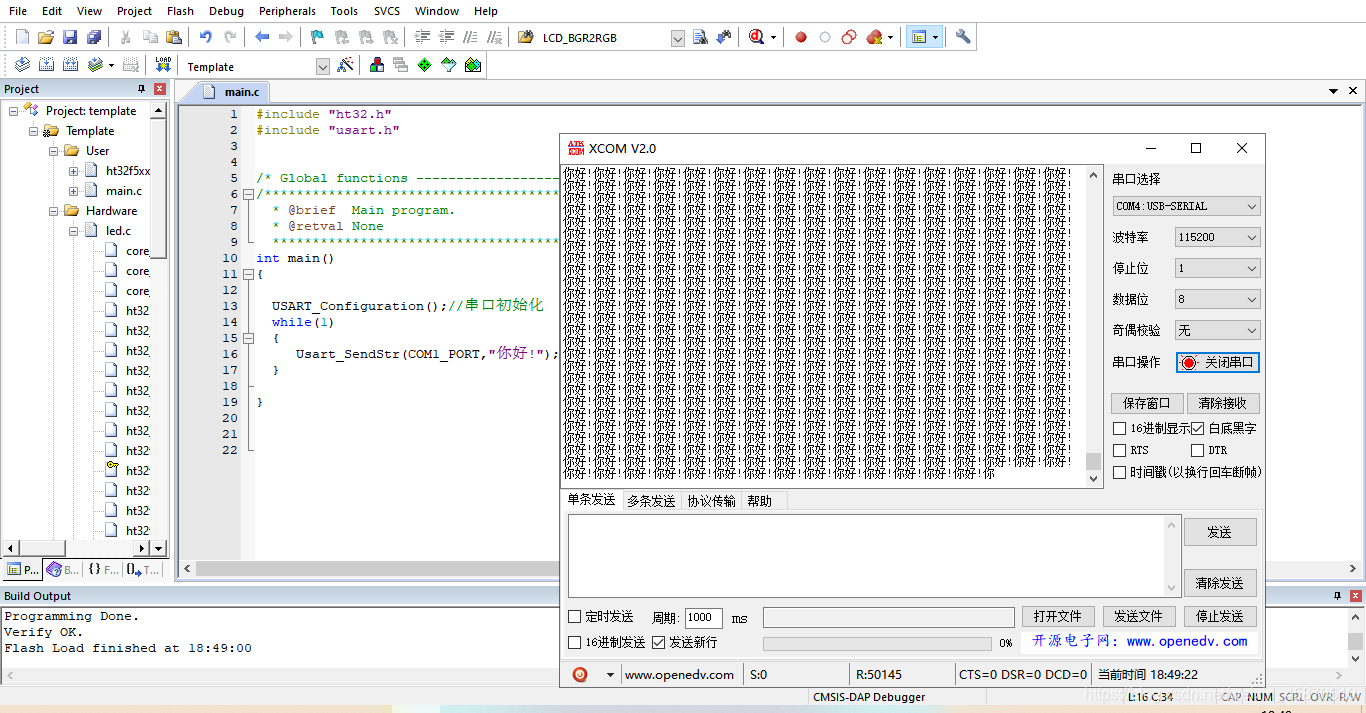
最终实现效果
三、HT32实现串口通信代码
main.c
#include "ht32.h"
#include "usart.h"
int main()
{
USART_Configuration();//串口初始化
while(1)
{
//循环发送字符串,用于测试是否通信成功
Usart_SendStr(COM1_PORT,"你好!");
}
}
usart.c
#include "usart.h"
#include "ht32f5xxxx_gpio.h"
#include "ht32_board.h"
#include "ht32_board_config.h"
/*USART_Configuration函数说明:配置usart串口*/
void USART_Configuration(void)
{
USART_InitTypeDef USART_InitStructure;
CKCU_PeripClockConfig_TypeDef CKCUClock= {{0}};
CKCUClock.Bit.AFIO = 1;
COM1_CLK(CKCUClock) = 1; //开启时钟
CKCU_PeripClockConfig(CKCUClock, ENABLE);
AFIO_GPxConfig(USART_GPIO_GROUP, USART_TX_PIN, AFIO_FUN_USART_UART);
AFIO_GPxConfig(USART_GPIO_GROUP, USART_RX_PIN, AFIO_FUN_USART_UART);
/*
波特率: 115200
长度: 8bits
停止位: 1位
校验位: 无
模式: 正常模式
*/
USART_InitStructure.USART_BaudRate = 115200;
USART_InitStructure.USART_WordLength = USART_WORDLENGTH_8B;
USART_InitStructure.USART_StopBits = USART_STOPBITS_1;
USART_InitStructure.USART_Parity = USART_PARITY_NO;
USART_InitStructure.USART_Mode = USART_MODE_NORMAL;
USART_Init(COM1_PORT, &USART_InitStructure);
// 使能 COM1_PORT 发送和接收
USART_TxCmd(COM1_PORT, ENABLE);
USART_RxCmd(COM1_PORT, ENABLE);
//中断设置
NVIC_EnableIRQ(COM1_IRQn);
USART_IntConfig(COM1_PORT, USART_FLAG_RXDR , ENABLE);
USART_IntConfig(COM1_PORT, USART_FLAG_TXDE , ENABLE);
/* 设置FIFO接收等级*/
USART_RXTLConfig(COM1_PORT, USART_RXTL_04);
}
/*COM1_IRQHandler函数说明:接收中断服务函数*/
void COM1_IRQHandler(void)
{
u8 data;
if( USART_GetFlagStatus(COM1_PORT, USART_FLAG_RXDR ) )//接收中断
{
data = USART_ReceiveData(COM1_PORT);//读取接收到的数据
printf("data = %c\n",data); //把收到的数据发送回电脑
}
}
/*函数说明:FIFO*/
void USART_Tx(const char* TxBuffer, u32 length)
{
int i;
for (i = 0; i < length; i++)
{
while (!USART_GetFlagStatus(COM1_PORT, USART_FLAG_TXC));
USART_SendData(COM1_PORT, TxBuffer[i]);
}
}
/*函数说明:发送一个字节*/
void Usart_Sendbyte(HT_USART_TypeDef* USARTx, u8 data)
{
USART_SendData(USARTx, data);
while (USART_GetFlagStatus(USARTx, USART_FLAG_TXDE) == RESET);
}
/*Usart_SendArray函数说明:发送数组*/
void Usart_SendArray(HT_USART_TypeDef* USARTx, u8 *array,u8 num)
{
u8 i;
for( i = 0;i < num;i++)
{
Usart_Sendbyte(USARTx,*array);
array++;
}
}
/*Usart_SendStr函数说明:发送字符串*/
void Usart_SendStr(HT_USART_TypeDef* USARTx, uint8_t *str)
{
uint8_t i;
for(i = 0;str[i] != '\0';i++)
{
Usart_Sendbyte(USARTx,str[i]);
}
}


















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











