






rviz_satellite
安装:
git clone -b ros1 --single-branch https://github.com/nobleo/rviz_satellite.git
打开launch目录下的demo.gps文件,修改经纬度,填入起始经纬度信息。
运行:roslaunch rviz_satellite demo.launch
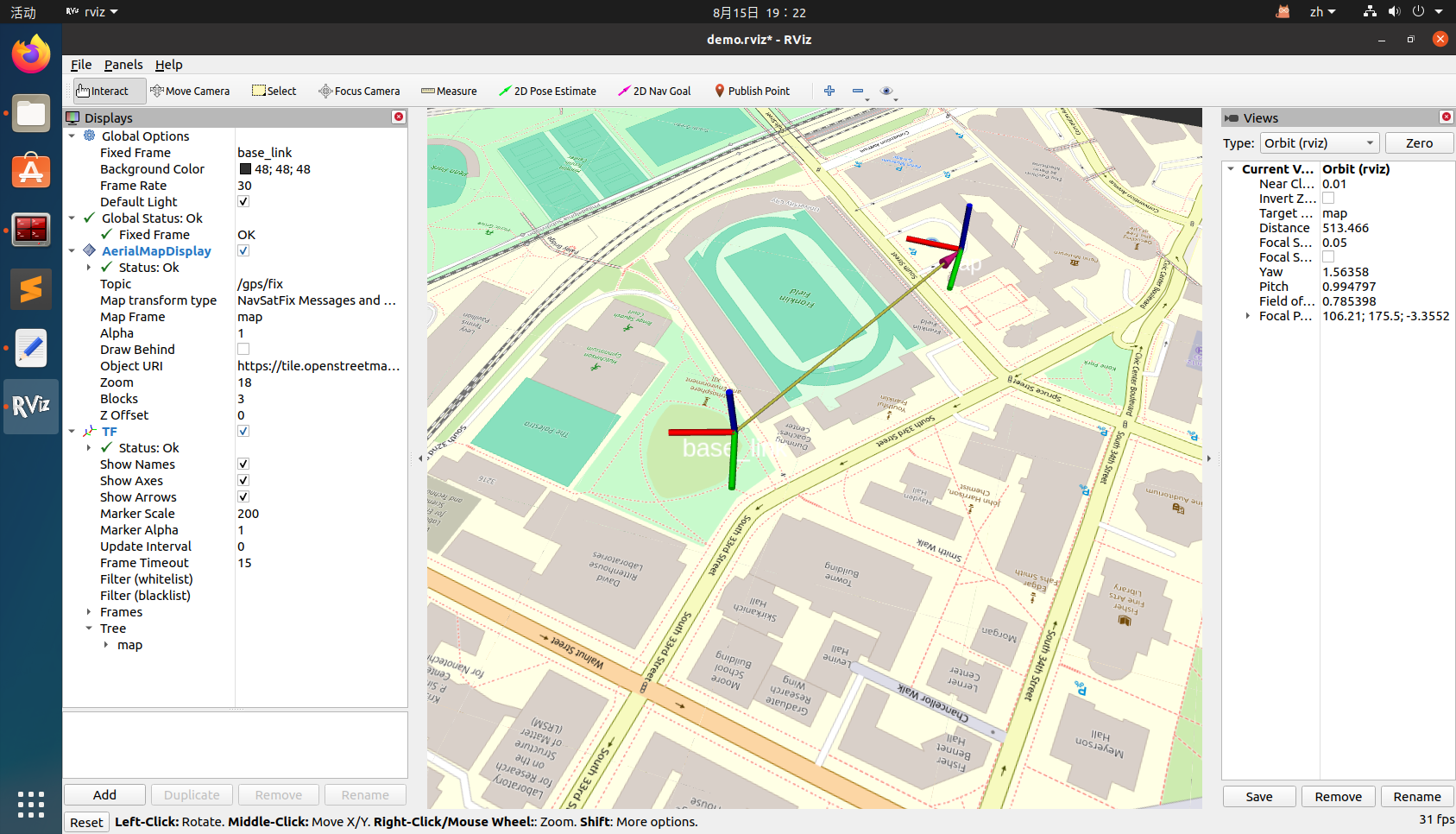
修改AerialMapDisplay:
| 选项 | 含义 |
|---|---|
| Topic | 接受gps话题,消息类型:sensor_msgs/NavSatFix |
| Robot frame | 机器人坐标系 |
| Dynamically reload | 当机器人移出中心块时,将导致图像重新加载,这仅在 TF 正确指定机器人框架时才有效 |
| Alpha | 透明度 |
| Draw Under | 将地图显示在所有其他几何体下方 |
| Zoom | 地图缩放级别,推荐16-19,最大22 |
| Blocks | 加载的相邻块数,将加载中心块,以及中心周围的许多块,最大值8 |
| Frame Convention | X/Y 轴的约定,默认XYZ 映射到 ENU |
| Object URI | 地图API接口 |
简单URL:
- https://maps.wikimedia.org/osm-intl/{z}/{x}/{y}.png # 最简陋 已经停用了
- https://tile.openstreetmap.org/{z}/{x}/{y}.png # 稍好点
付费:
TomTom: https://api.tomtom.com/map/1/tile/basic/main/{z}/{x}/{y}.png?tileSize=512&key=[TOKEN]
Mapbox: https://api.mapbox.com/styles/v1/mapbox/satellite-v9/tiles/256/{z}/{x}/{y}?access_token=[TOKEN]
GoogleMaps: https://maps.googleapis.com/maps/api/staticmap?maptype=satellite¢er={lat},{lon}&zoom={z}&size=256x256&key=[TOKEN]
查看效果:















 535
535

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









