






《雷达原理》各章内容与链接
第一章:绪论
第二章:发射机
第三章:接收机
第四章:显示器
第五章:作用距离
第六章:距离测量
第七章:角度测量
第八章:速度测量
学习链接见哔哩大学
雷达测距原理、精度、分辨力以及最大不模糊距离
一、引言
雷达作为一种利用电磁波探测目标的设备,在众多领域有着广泛应用。其测距功能是雷达的基本任务之一,本文将详细介绍雷达测距原理、精度、分辨力以及最大不模糊距离等相关知识,旨在帮助读者深入理解雷达测距技术的核心要点。
二、雷达测距原理
(一)基本原理
无线电波在均匀介质中以固定速度直线传播(在自由空间传播速度约等于光速c = 3×10⁵km/s)。目标至雷达的斜距R可通过测量电磁波在雷达和目标之间往返一次所需的时间tᵣ得到,即R = 1/2ctᵣ,时间tᵣ也就是回波相对发射信号的延迟,所以目标距离测量的关键在于精确测定延迟时间tᵣ。根据雷达发射信号的不同,测定延迟时间通常采用脉冲法、频率法和相位法,脉冲雷达常采用脉冲法,连续波雷达常采用频率法或相位法。
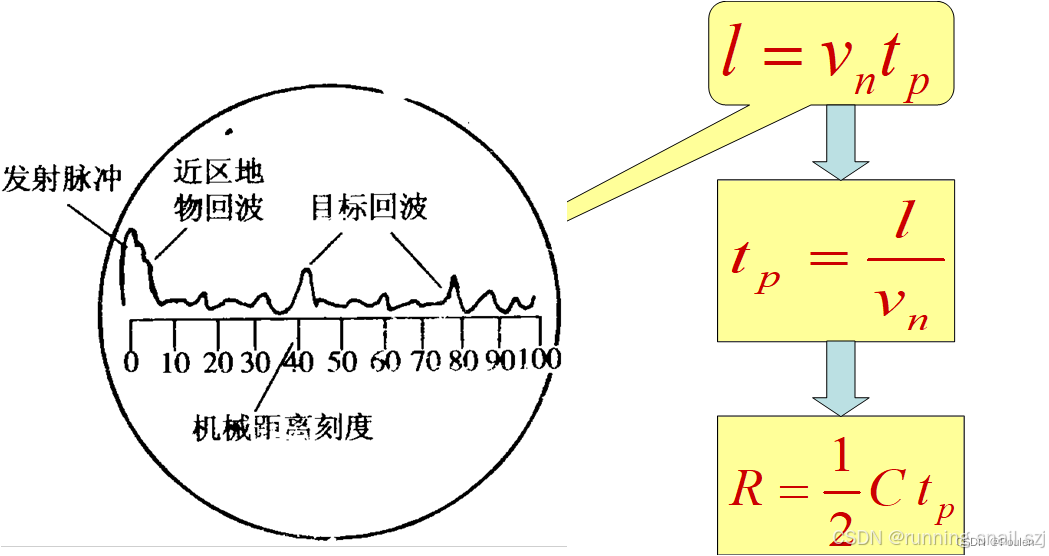
(二)脉冲法测距(显示器上测距)
- 基本原理
在脉冲雷达中,回波信号是滞后于发射脉冲tᵣ的回波脉冲。早期雷达用显示器作为终端,在显示器画面上根据扫掠量程和回波位置直接测读延迟时间,现代雷达则常采用电子设备自动测读。 - 回波到达位置定义
- 以目标回波脉冲的前沿作为到达时刻,这种方法容易受回波大小、噪声及比较电平不稳的影响,产生误差。
- 以回波脉冲的中心(或最大值)作为到达时刻,对于点目标,两种定义所得距离数据相差约为τ/2(τ为脉冲宽度),可通过距离校零消除。
(三)调频法测距
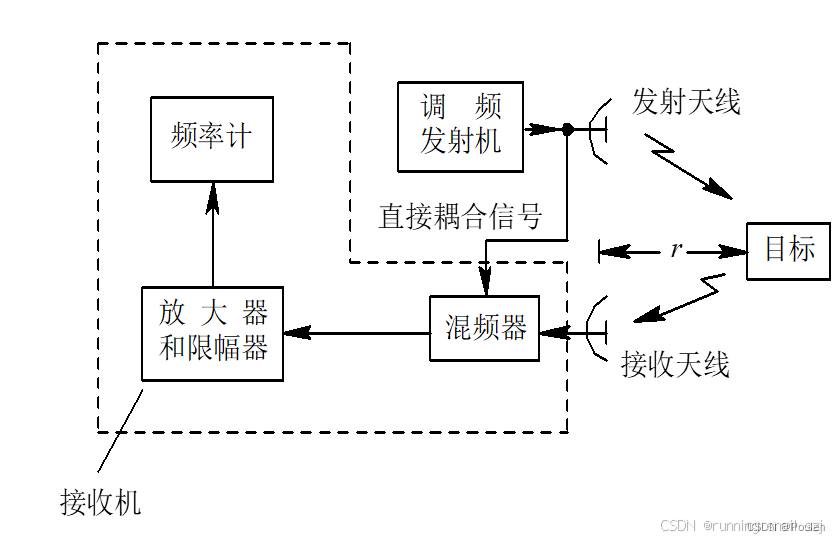
- 调频法测距原理
调频法测距可用于连续波雷达和脉冲雷达。发射机产生连续高频等幅波,其频率按一定规律(如三角形、正弦形等)变化,目标回波和发射机直接耦合过来的信号加到接收机混频器内,产生差频电压,经放大、限幅后加到频率计上,由于差频电压频率与目标距离有关,频率计刻度可直接采用距离长度作为单位。 - 锯齿波调频测距原理
发射信号频率按锯齿波形周期变化(线性调频LFM,又称Chirp信号),具有起始频率f_c、带宽B、持续时间T_c和斜率S。雷达发射Chirp信号,接收目标反射回波信号后,根据回波信号与发射信号的频率差(对于无径向运动目标,频率差决定于回波延迟)可确定目标回波时延,进而得到目标距离R = cSτ/2f_0(f_0为中频)。 - 三角波调频测距原理
发射频率按周期三角变化规律的信号,平均频率为f_0,频率变化周期为T_m,最大频偏为Δf。回波频率和发射频率变化规律相同但滞后,滞后时间tᵣ = 2R/c,通过计算发射频率和回波频率间的差拍频率可得到目标距离R = cΔf(tᵣ - T_m/2)/4f_m(f_m为三角调频频率)。
三、影响雷达测距精度的因素
(一)误差组成
由测距公式全微分可知,测距误差由电波传播速度c的变化Δc以及测时误差Δtᵣ两部分组成,用增量代替微分可得测距误差表达式。误差按性质分为系统误差和随机误差。
(二)系统误差
系统各部分对信号的固定延时造成的误差,理论上可在校准雷达时补偿,但实际很难完善补偿,雷达技术参数中常给出允许的系统误差范围。
(三)随机误差
因偶然因素引起,又称偶然误差。设备本身工作不稳定性造成的设备误差(如接收时间滞后不稳定性、回路参数偶然变化、晶体振荡器频率不稳定、读数误差等)和系统以外偶然因素引起的外界误差(如电波传播速度偶然变化、大气折射、目标反射中心随机变化等)都属于随机误差。随机误差在多次测量中距离值随机,一般不能补偿,是衡量测距精度的主要指标。
(四)具体影响因素
- 电磁波传播速度变化产生的误差
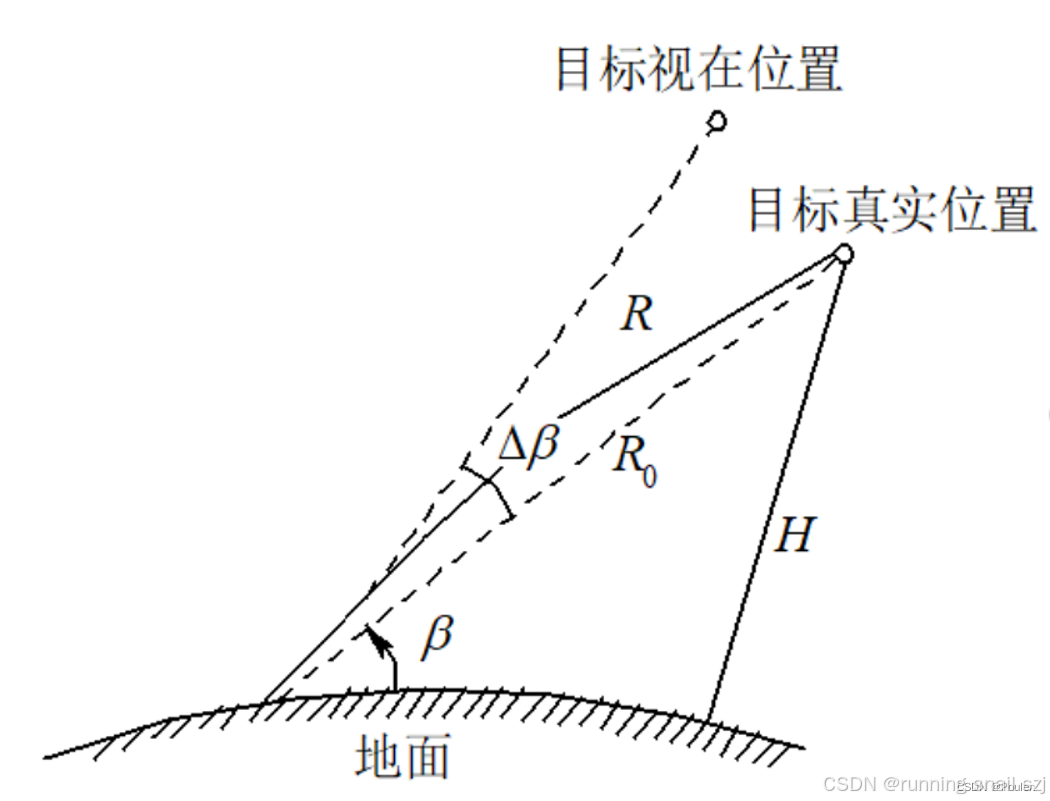
大气层分布不均匀,其参数随时间、地点变化,导致电波传播速度c随机变化,引起相对测距误差。昼夜间大气参数变化引起的传播速度变化在常规雷达测距中可忽略,但雷达工作环境不同时,应适当调整电磁波传播速度以减少误差。 - 因大气折射引起的误差
电波在大气中传播因介质不均匀产生折射,传播路径弯曲,导致测距误差(同时有测仰角误差),目标距离越远、高度越高,折射引起的测距误差越大。 - 测读方法误差
早期脉冲雷达从显示器测量目标距离时,荧光屏亮点直径、刻度精度、人工测读惯性等会引起误差;采用电子自动测距方法时,回波中心估计误差(正比于脉宽τ且反比于信噪比)和计数器量化误差等会造成测距误差。
(五)总结
雷达测距精度是测距值与目标实际值的差值,用均方误差衡量,主要影响因素有电磁波传播速度变化、大气折射和测读方法。系统误差可校准,随机误差不可校准且是衡量测距精度的主要指标。
四、距离分辨率和测距范围
(一)距离分辨率
- 定义
同一方向上两个大小相等点目标之间最小可区分距离。在显示器上测距(脉冲法测距)时,分辨力主要取决于回波脉冲宽度τ和光点直径d所代表的距离;用电子方法测距或自动测距时,由脉冲宽度τ或波门宽度决定,对于复杂脉冲压缩信号,由雷达信号有效带宽B决定,有效带宽越宽,距离分辨力越好(信号持续带宽定义为信号时延分辨常数的倒数,时延分辨常数由模糊函数确定)。 - 表达式
显示器上测距时,距离分辨力Δr_c = 1/2(τ + d/υ_n)(d为光点直径,υ_n为光点扫掠速度);电子测距时,Δr_c = c/2B。
(二)测距范围
- 最小可测距离
脉冲雷达收发共用天线,发射脉冲带宽τ时间内接收机不能正常接收目标回波,发射脉冲过去后天线收发开关恢复接收状态也需时间t₀,此期间不能测距,所以最小可测距离R_min = 1/2c(τ + t₀)。 - 最大单值测距范围(最大不模糊距离)
由脉冲重复周期Tᵣ决定,为保证单值测距,通常应选取Tᵣ ≥ 2R_max/c(R_max为雷达最大作用距离,由雷达方程决定)。当往返时间Δt = tᵣ = Tᵣ对应的距离为雷达最大不模糊距离R_u = cTᵣ/2。若雷达重复频率选择不满足单值测距要求,会产生距离模糊,目标回波对应的距离R = 1/2c(tᵣ + mTᵣ)(m为模糊值),解决距离模糊问题可采用多种重复频率(多重频技术)或“舍脉冲”法。
(三)多种重复频率(多重频技术)
设重复频率分别为fᵣ₁和fᵣ₂(脉冲重复周期为Tᵣ₁和Tᵣ₂,且fᵣ₁ < fᵣ₂,Tᵣ₁ > Tᵣ₂),对应的不模糊距离分别为R_u₁ = c/2fᵣ₁和R_u₂ = c/2fᵣ₂,小于期望的不模糊距离R_u(对应PRF为fᵣ_d,R_u = c/2fᵣ_d)。fᵣ₁和fᵣ₂的选择应保证在一个期望的脉冲重复周期PRI(T_d = 1/fᵣ_d)内,两种PRF下发射的脉冲数目互质,如fᵣ₁ = N * fᵣ_d、fᵣ₂ = (N + 1) * fᵣ_d。在一个期望的PRI内,两种发射信号的回波仅在一个时延位置重合,即为目标位置。设M₁和M₂分别为两种PRF下对应的脉冲数,测出两种回波信号对应的时延t₁和t₂(相对于当前发射脉冲的时延),根据三种情况可求出目标距离。
(四)“舍脉冲”法
每发射M个脉冲舍弃一个作为附加标志,发射脉冲串A₁ - A_M中A₂不发射,接收回波脉冲串同样每M个回波脉冲中缺少一个。从A₂后逐个累计发射脉冲数,直到某一发射脉冲后没有回波脉冲时停止计数,累计数值就是回波跨越的重复周期数m,知道m后可套用公式解距离模糊。
五、结论
本文全面阐述了雷达测距原理、精度、分辨力以及最大不模糊距离相关知识。雷达测距原理基于电磁波传播特性和时间测量,不同测距方法各有特点。影响测距精度的因素众多,包括电波传播速度变化、大气折射和测读方法等,其中随机误差是衡量精度的关键。距离分辨率决定了雷达区分目标的能力,测距范围涉及最小可测距离和最大不模糊距离,距离模糊问题可通过多种方法解决。这些知识对于深入研究雷达技术、提高雷达性能以及在相关领域的应用具有重要意义。

















 2906
2906

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









