







👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
多旋翼物流无人机的节能轨迹规划是一项重要的技术,可以有效减少无人机的能量消耗,延长飞行时间,提高物流效率。下面是一些常见的节能轨迹规划方法:
-
最短路径规划:通过寻找起点和终点之间的最短路径,减少飞行距离,从而节省能量消耗。可以使用经典的最短路径算法如Dijkstra算法和A*算法来实现。
-
动态路径规划:考虑当前环境的动态变化,比如风速、天气状况和地形高度等因素,并实时优化飞行路径。这样可以避免飞行过程中遭受很大的阻力,从而减少能量消耗。
-
高效充电站布置:合理规划充电站的位置,使得无人机在物流任务执行过程中可以方便地进行补充能量。这样无人机可以减少回程飞行距离,节省能量。
-
光伏充电:在无人机上安装太阳能电池板,通过太阳能充电来提供能源。这种方式可以减少对传统电力的依赖,减少碳排放。
-
多机协同飞行:通过与其他物流无人机进行协同飞行,在空中形成集群,减少空气阻力,提高整体能源利用效率。
总之,节能轨迹规划为多旋翼物流无人机提供了较大的优化空间,通过合理规划飞行路径、优化充电策略以及使用新能源技术,可以显著减少能量消耗,提高物流效率。
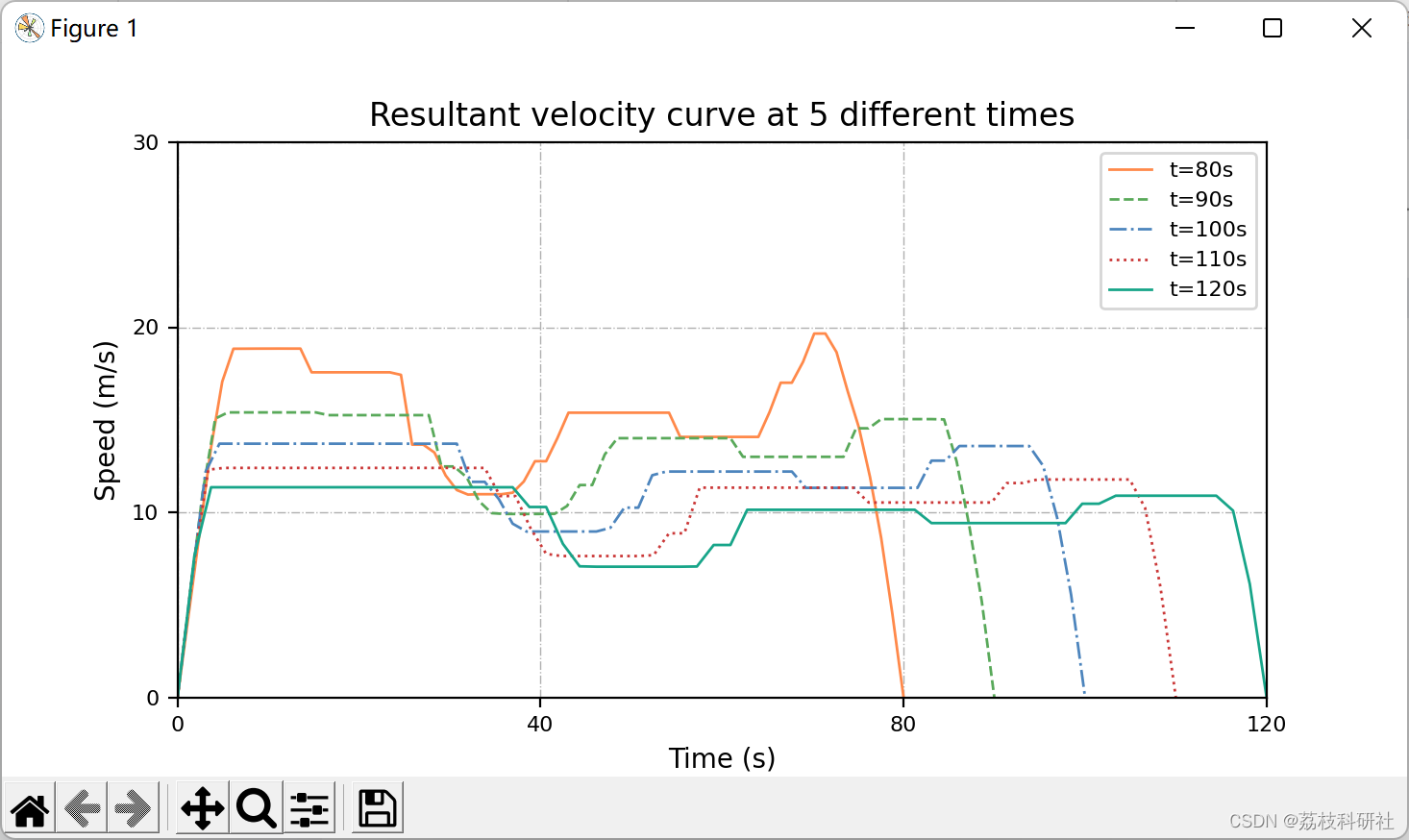
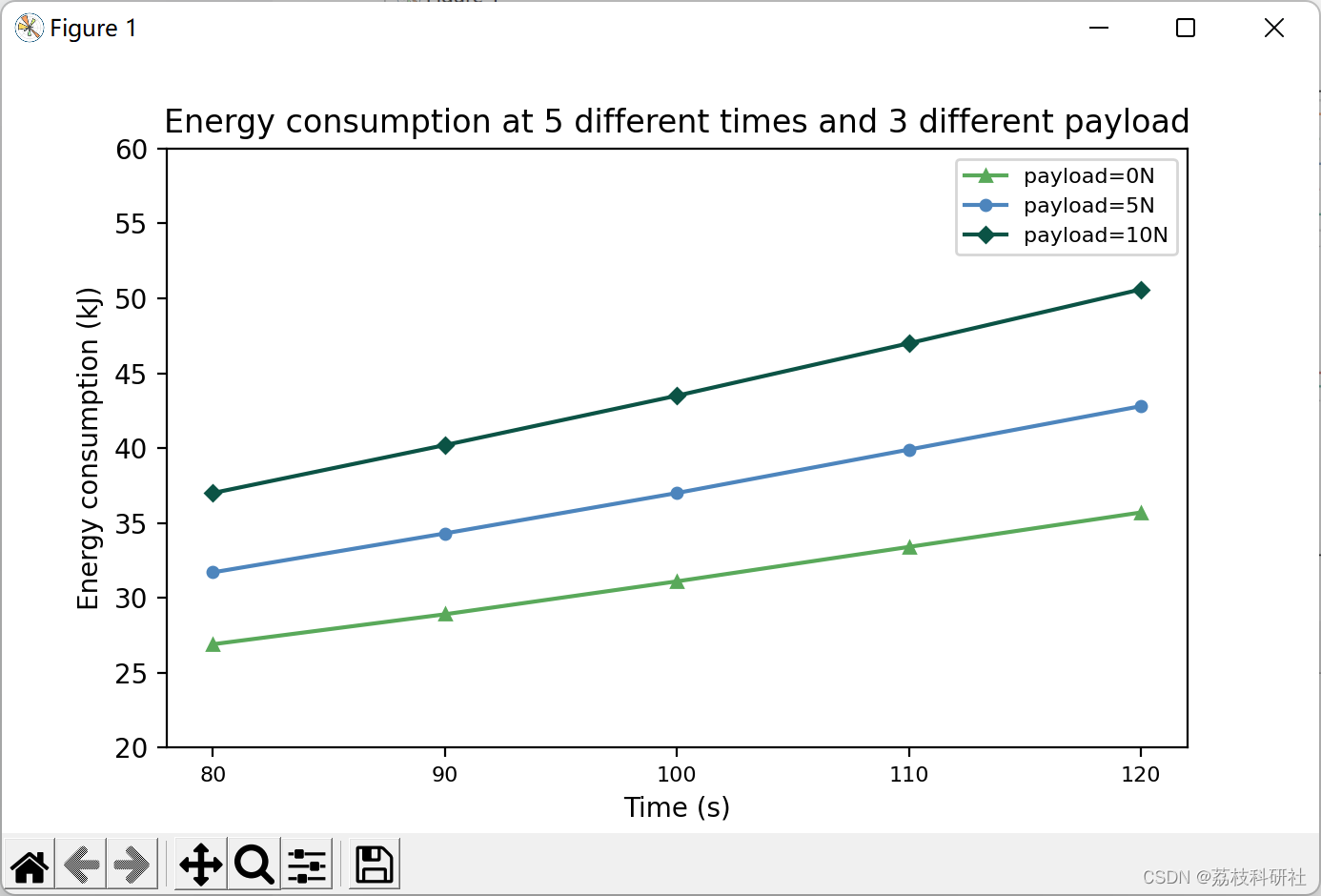
本文考虑静态环境下无人机轨迹轨迹的可行性和能耗特性。
📚2 运行结果
部分代码:
def VelDataAboutTime():
blocks = []
b1 = Block(0, 0, 0, 150, 200, 200) # (x1, y1, z1, x2, y2, z2)
b2 = Block(100, 150, 120, 300, 400, 450) # (x1, y1, z1, x2, y2, z2)
b3 = Block(250, 350, 400, 500, 480, 500) # (x1, y1, z1, x2, y2, z2)
b4 = Block(420, 220, 200, 650, 400, 450) # (x1, y1, z1, x2, y2, z2)
b5 = Block(550, 80, 150, 650, 400, 300) # (x1, y1, z1, x2, y2, z2)
b6 = Block(600, 80, 50, 800, 150, 200) # (x1, y1, z1, x2, y2, z2)
blocks.append(b1)
blocks.append(b2)
blocks.append(b3)
blocks.append(b4)
blocks.append(b5)
blocks.append(b6)
block2Ds = []
for b in blocks:
block2Ds.append(Block2D(b.x1, b.y1, b.x2, b.y2))
goal = [800, 100, 60]
c_x = [] # 每段 (x1, x2)
c_y = [] # 每段 (y1, y2)
c_z = [] # 每段 (z1, z2)
corridor = []
for block in blocks:
c_x.append([block.x1, block.x2]) # 提取出每一段的 (x1,x2)
c_y.append([block.y1, block.y2]) # 提取出每一段的 (y1,y2)
c_z.append([block.z1, block.z2]) # 提取出每一段的 (z1,z2)
corridor.append(c_x)
corridor.append(c_y)
corridor.append(c_z)
time = [
[13, 21, 9, 12, 12, 13],
[16, 23, 10, 13, 13, 15],
[18, 25, 11, 15, 15, 16],
[20, 27, 13, 16, 16, 18],
[22, 29, 14, 18, 18, 19]
]
# time = [13, 21, 9, 12, 12, 13] # 80 2.68677585e+04
# time = [16, 23, 10, 13, 13, 15] # 90 2.88795396e+04
# time = [18, 25, 11, 15, 15, 16] # 100 3.10684295e+04
# time = [20, 27, 13, 16, 16, 18] # 110 3.33565508e+04
# time = [22, 29, 14, 18, 18, 19] # 120 3.57001138e+04
for i in range(5):
print("============================================")
energy, power, s, vel = UAV3D(time[i], goal, corridor)
print(energy)
""" save vel to excel """
vel_x = list(np.array(vel[0]).flatten())
vel_y = list(np.array(vel[1]).flatten())
vel_z = list(np.array(vel[2]).flatten())
for index in range(len(vel_x)):
velocity = math.sqrt(vel_x[index] ** 2 + vel_y[index] ** 2 + vel_z[index] ** 2)
CVXsheet.write(index, i, velocity)
workbook.save('Velocity.xls')
def plot_blocks(blocks):
plt.figure(1)
ax = plt.axes(projection='3d')
ax.set_xlabel('X(m)')
ax.set_ylabel('Y(m)')
ax.set_zlabel('Z(m)')
# ax.set_xticks(np.linspace(0, 100, 4))
# ax.set_yticks(np.linspace(0, 100, 4))
# ax.set_zticks(np.linspace(0, 100, 4))
ax.set_xlim(0, 1000)
ax.set_ylim(0, 1000)
🌈3 Python代码实现
🎉4 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Wu Kunpeng (2022) Energy-Efficient Trajectory Planning for Multi-rotor Logistics UAVs
















 5565
5565











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











