







👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
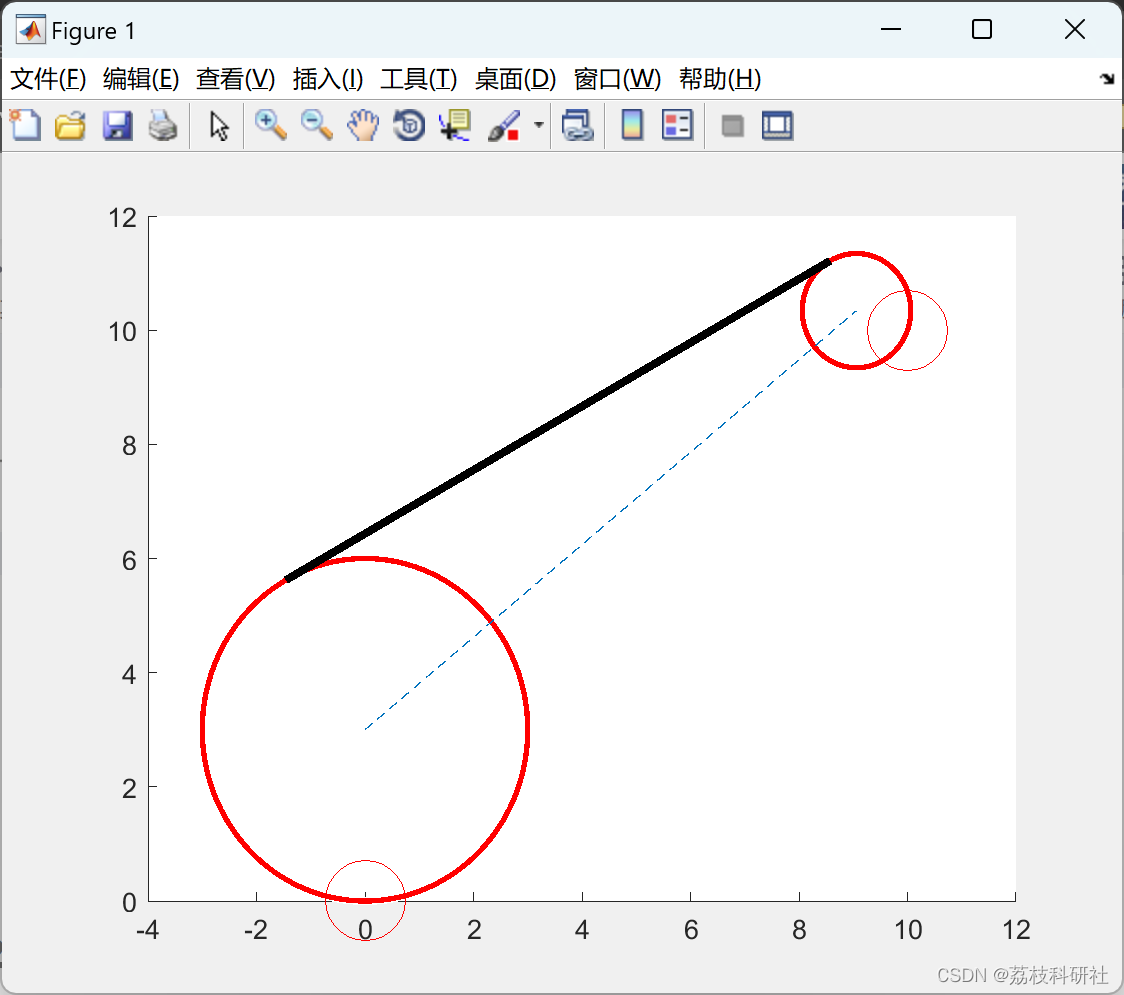
Dubins曲线是在1957年提出的,该曲线用来解决平面内带方向两点间最短距离的问题,Dubins用几何的方法证明了Dubins曲线集合中存在最短路径[19.20];路径的组成形式有两种圆弧-直线-圆弧(CSC)和三段圆弧(CCC),其中圆弧又包括方向为逆时针旋转的圆弧(向左旋转用L表示)和方向为顺时针旋转(向右旋转用R表示)的两种圆弧,那么Dubins集合共有六种路径分别为LRL、LSR、LSL、RLR、RSL、RSR。Dubins算法之前多应用于机器人和智能小车领域,后来研究者们开始将该算法扩展到无人机的路径规划研究中,针对各种工况,对Dubins算法进行改进,取得了令人满意的成果[21-47],本文采用Dubins算法规划出某型号的大型固定翼无人机的可飞行路径。
Dubins模型具体如下:假定平面上带方向的两点,起始点为 Pstart终止点为Pend,两个点的方向为0、02,两点间的直线距离为d,无人机的最小转弯半径为r;对确定的两点(Pstart.01)和(Pend,O2),寻找出两点间的最短路径,该路径是光滑可导的。
📚2 运行结果
部分代码:
%final Pose
xf = 10; yf = 10; phif=deg2rad(70);
%curvature constraints:
rhos = 3; rhof = 1;
%center of curvature circles:
xcs = xs - rhos*cos(phis - pi/2);
ycs = ys - rhos*sin(phis - pi/2);
xcf = xf - rhof*cos(phif - pi/2);
ycf = xf - rhof*sin(phif - pi/2);
%tangent entry (E) and exit (X)
c = sqrt((xcs - xcf)^2 + (ycs-ycf)^2);
alpha = asin((rhof-rhos)/c);
beta = atan2(ycf-ycs, xcf - xcs);
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]章天杨. 基于Dubins算法的大型无人机路径规划研究[D].安徽工程大学,2020.DOI:10.27763/d.cnki.gahgc.2020.000071.
[2]李寰宇,陈延龙,张振兴,刘夏锐.基于Dubins的无人机自动避撞路径规划[J].飞行力学,2020,38(05):44-49.DOI:10.13645/j.cnki.f.d.20200628.001.
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











