









👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录

💥1 概述
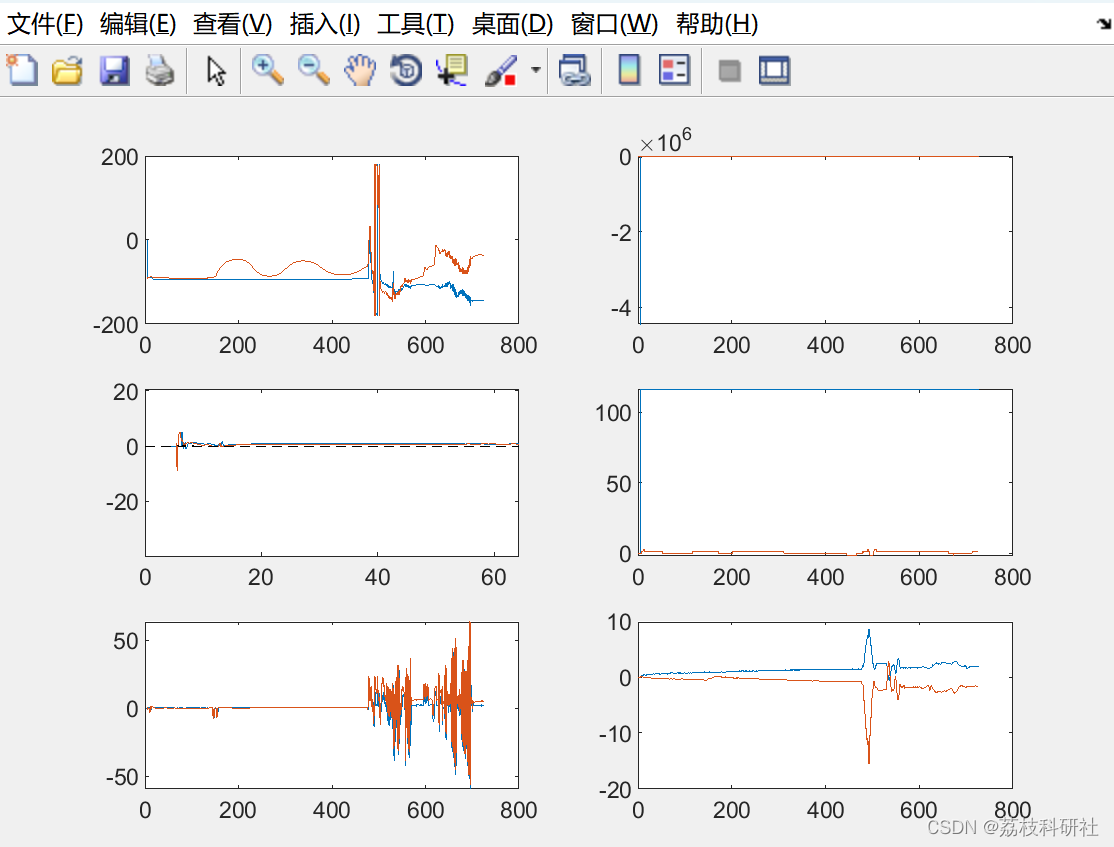
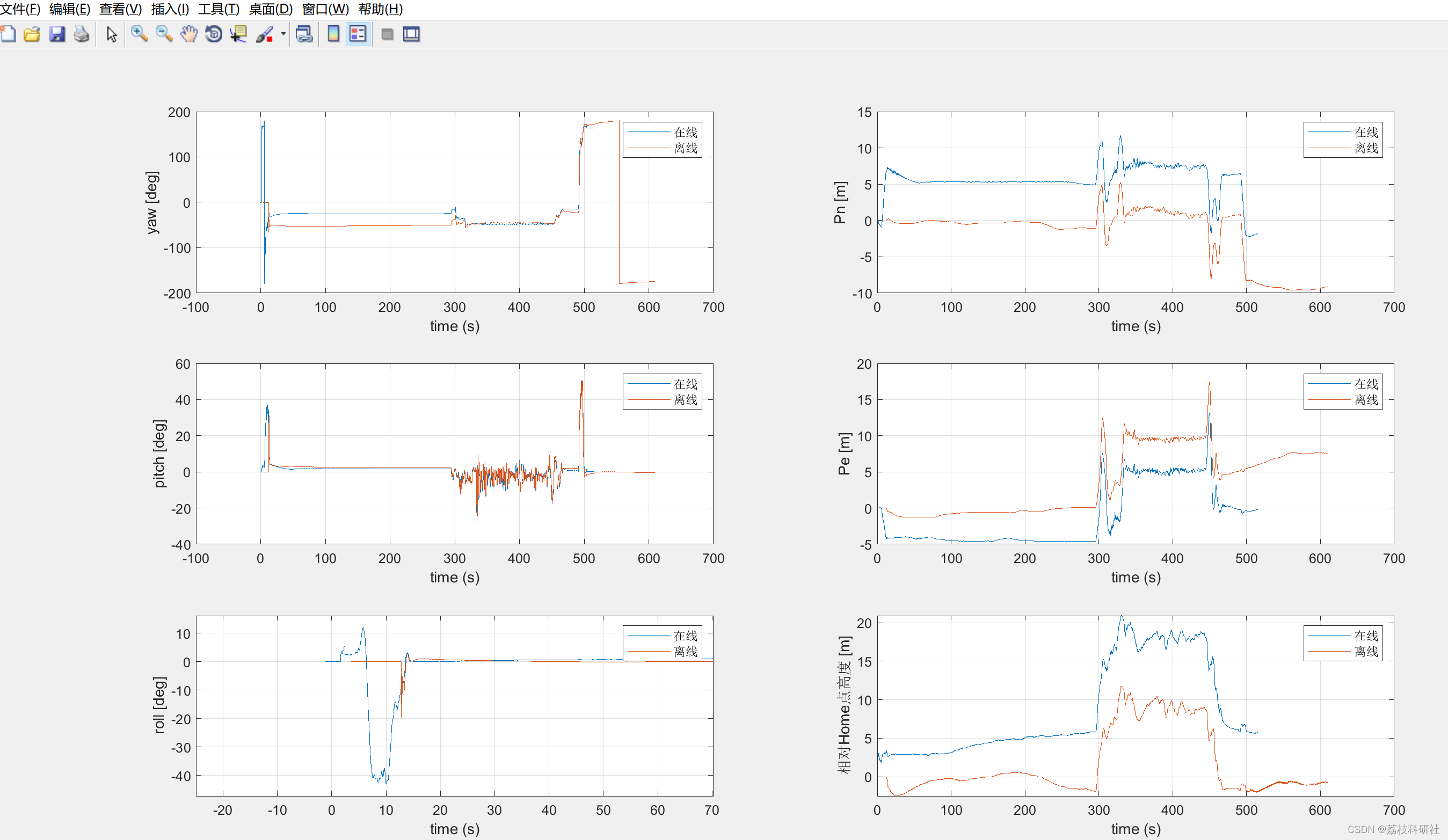
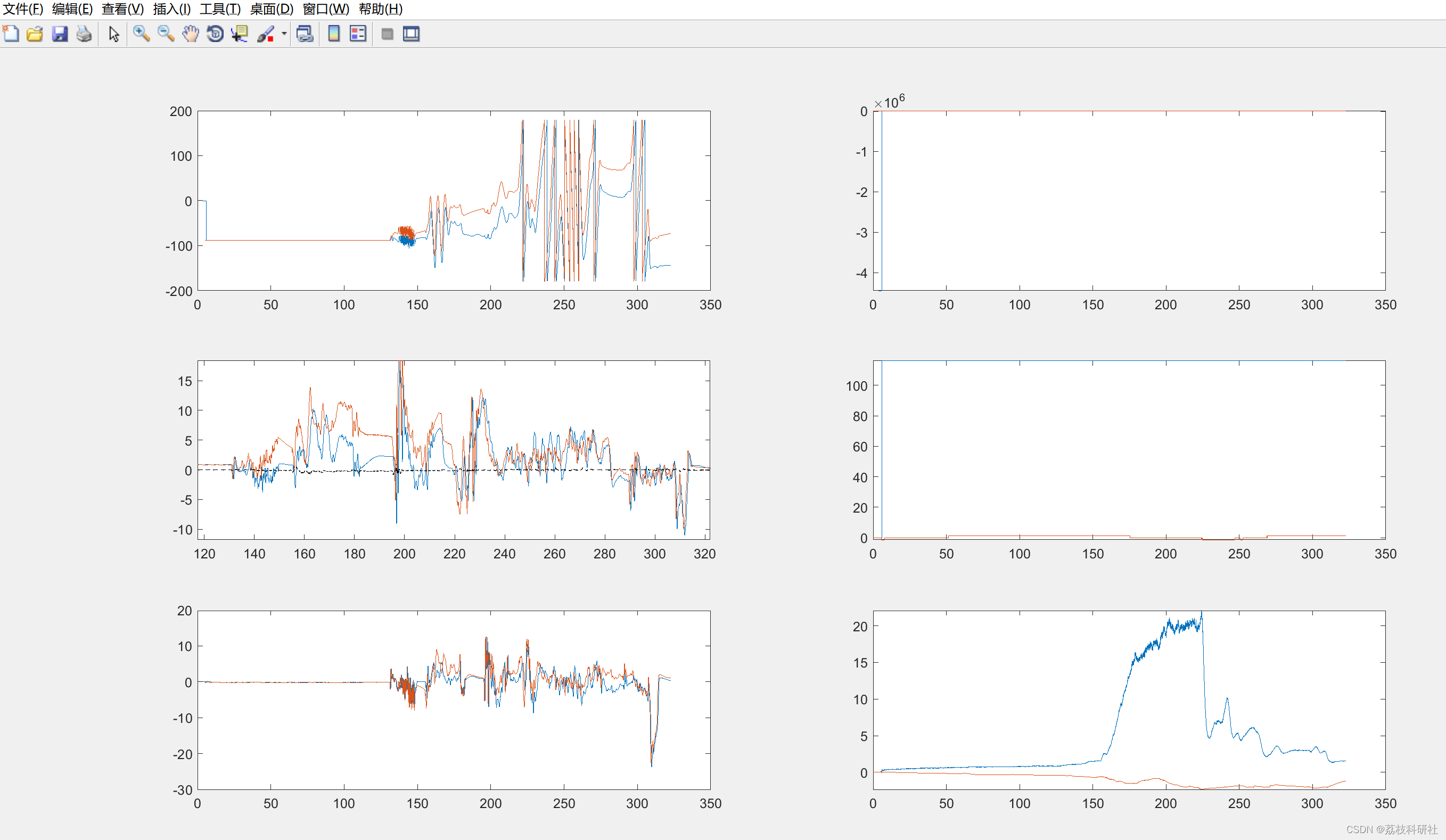
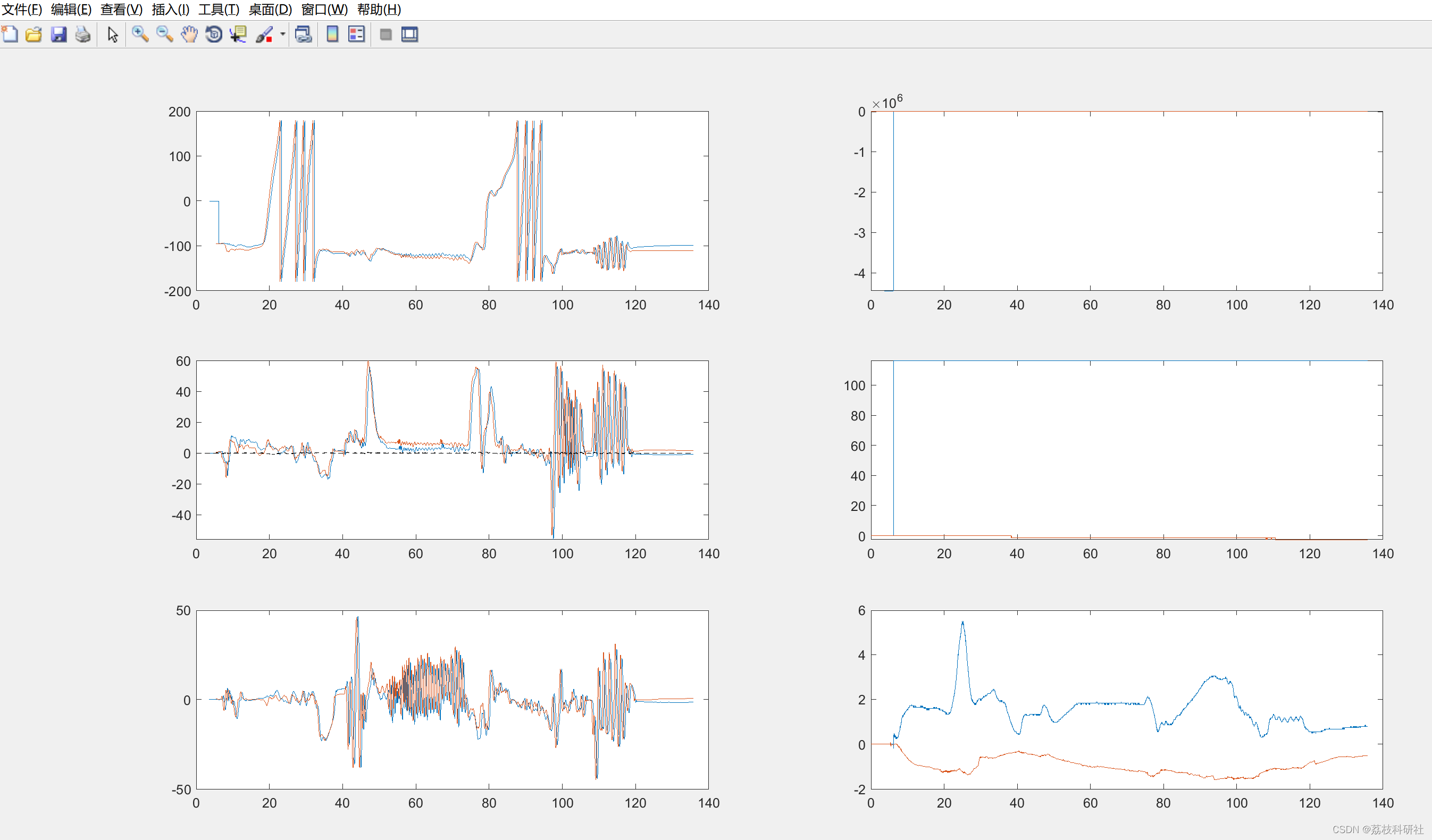
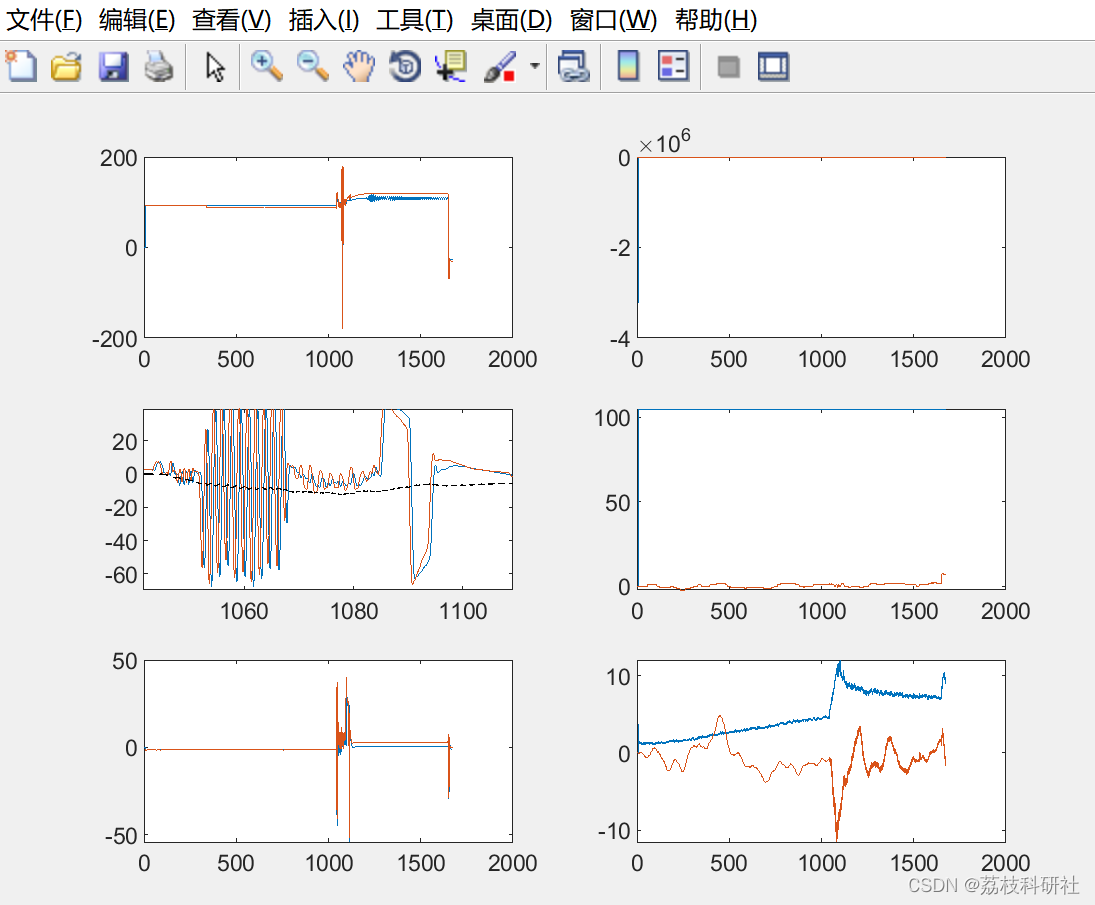
📚2 运行结果
 部分代码:
部分代码:
%%
%% 无人机参数
UAVPARAM_SET.euler0_roll_pitch_yaw = [0,0,0*45]*pi/180;
UAVPARAM_SET.gpsvel0 = [0,0,0]; % m/s
UAVPARAM_SET.mag_NED = [0.2838,-0.03464,0.4595]; %[0.22, 0, 0.42];%
UAVPARAM_SET.refloc = [39,117,0]; % lat lon alt
UAVPARAM_SET.mass = 4.957; % kg
UAVPARAM_SET.inertia = 1e-6*[...
186222 564 8670;
564 164400 -31;
8670 -31 336920;]; % kgm^2
UAVPARAM_SET.designCenter = [-0.3,0,0]; % 设计中心位置 机体坐标系(原点在机头)
UAVPARAM_SET.pressureCenter = [-0.32,0,0]; % 全机压力中心 机体坐标系(原点在机头)
UAVPARAM_SET.gravityCenter = UAVPARAM_SET.designCenter + 1e-3*[0*0.395,0*0.664,19.338]; % 全机重心 机体坐标系(原点在机头)
UAVPARAM_SET.S = 0.316; % 有效面积 1787727e-6 ?
UAVPARAM_SET.meanAerodynamicChord = 0.5; % 平均气动弦长
UAVPARAM_SET.wingspan = 1.86; % 翼展
% 气动参数
UAVPARAM_SET.AeroParam.CY_beta = -1; % 侧向力/beta 1/rad
UAVPARAM_SET.AeroParam.CY_rudder = 1; % 侧向力/rudder 1/rad
UAVPARAM_SET.AeroParam.Cl_beta = 0; % 滚转力矩/beta 1/rad
UAVPARAM_SET.AeroParam.Cl_aileron = -1; % 滚转力矩/aileron 1/rad
UAVPARAM_SET.AeroParam.Cl_rudder = 1; % 滚转力矩/rudder 1/rad
UAVPARAM_SET.AeroParam.Cl_p = -1; % 滚转力矩/p 1/(rad/s)
UAVPARAM_SET.AeroParam.Cl_r = 0; % 滚转力矩/p 1/(rad/s)
UAVPARAM_SET.AeroParam.Cn_beta = 0; % 偏航力矩/beta 1/rad
UAVPARAM_SET.AeroParam.Cn_rudder = -1; % 偏航力矩/rudder 1/rad
UAVPARAM_SET.AeroParam.Cn_aileron = 0; % 偏航力矩/aileron 1/rad
UAVPARAM_SET.AeroParam.Cn_p = 0; % 偏航力矩/p 1/(rad/s)
UAVPARAM_SET.AeroParam.Cn_r = -1; % 偏航力矩/r 1/(rad/s)
UAVPARAM_SET.AeroParam.CD0 = 2; % 零攻角阻力
UAVPARAM_SET.AeroParam.CD_alpha = 1; % 阻力/alpha 1/rad
UAVPARAM_SET.AeroParam.CL0 = 2; % 零攻角升力
UAVPARAM_SET.AeroParam.CL_alpha = 1; % 升力/alpha 1/rad
UAVPARAM_SET.AeroParam.CL_elevator = 1; % 升力/elevator 1/rad
UAVPARAM_SET.AeroParam.Cm0 = 0; % 零攻角俯仰力矩
UAVPARAM_SET.AeroParam.Cm_alpha = -1; %
UAVPARAM_SET.AeroParam.Cm_elevator = -1; %
UAVPARAM_SET.AeroParam.Cm_q = -1;
%%
ENVIRONMENT_SET.windVel = 3; % m/s
ENVIRONMENT_SET.windAngle = 0; % deg
ENVIRONMENT_SET.gravity = [0;0;9.81]; % m/s^2
%%
% 升降舵
ACTUATOR_SET.elevator.naturalFreq = 35*180/pi; % rad/s
ACTUATOR_SET.elevator.dampingRatio = 0.7;
ACTUATOR_SET.elevator.def_max = 40*pi/180;
ACTUATOR_SET.elevator.def_min = -40*pi/180;
ACTUATOR_SET.elevator.rateLimit = 500*pi/180;
ACTUATOR_SET.elevator.initialPos = 0;
% 方向舵
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]宝胜,无人机研究.
[2] 王晓海,孟秀云,李传旭.基于MPC的无人机航迹跟踪控制器设计[J].系统工程与电子技术,2021,43(01):191-198.
[3]刘斐. 基于模型预测控制的无人机轨迹跟踪方法研究[D].湖北工业大学,2017.
















 7095
7095











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











