






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
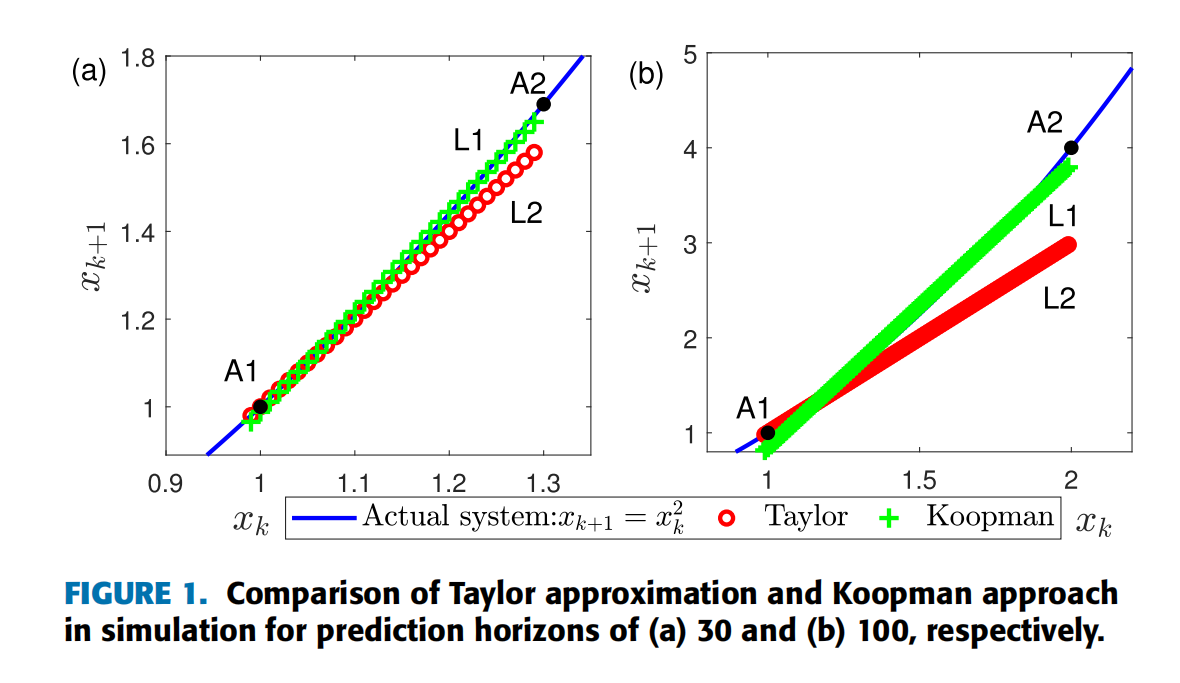
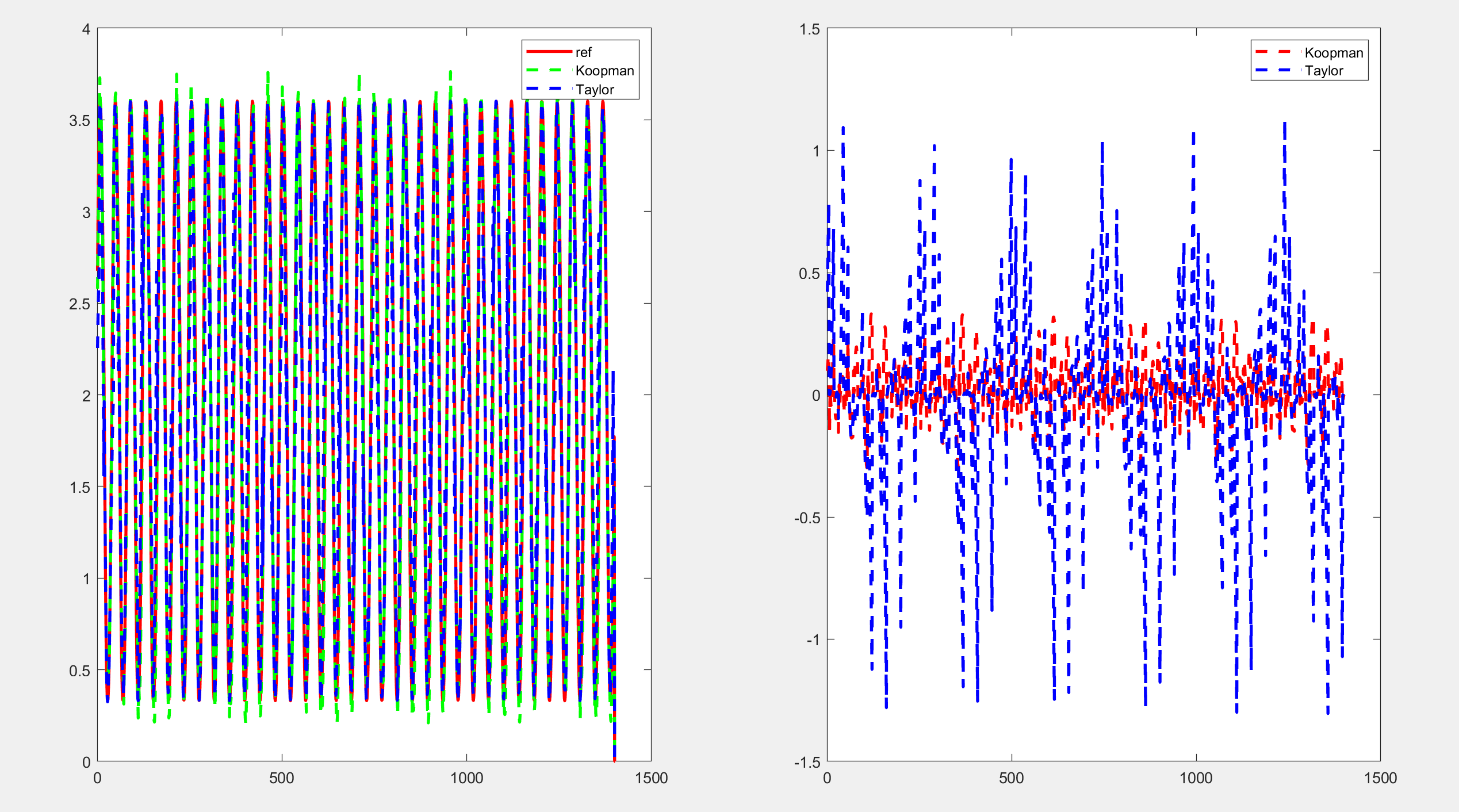
2.1 比较使用泰勒级数和Koopman算子进行线性化的准确性
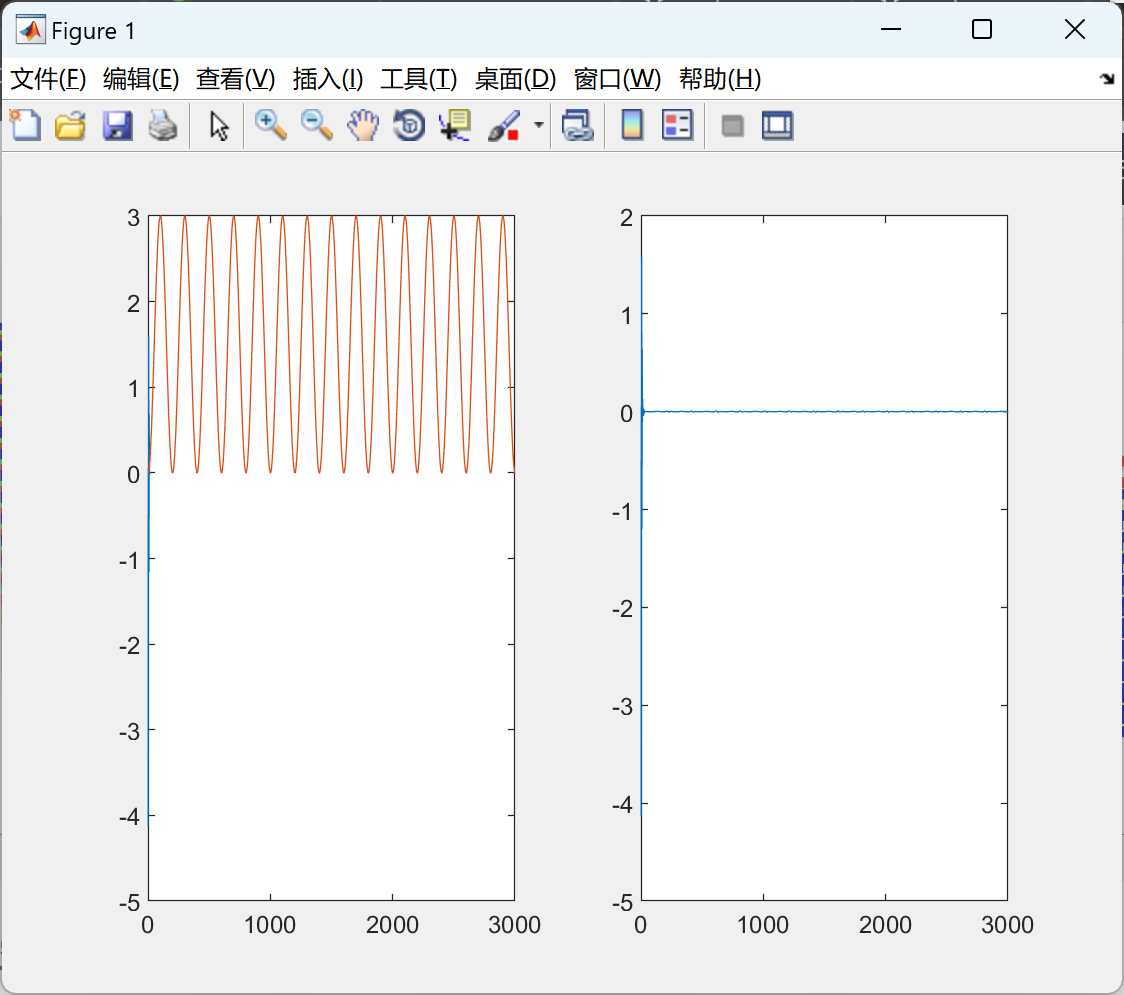
2.2 预测控制,使用Koopman算子进行线性化,一个线性模型
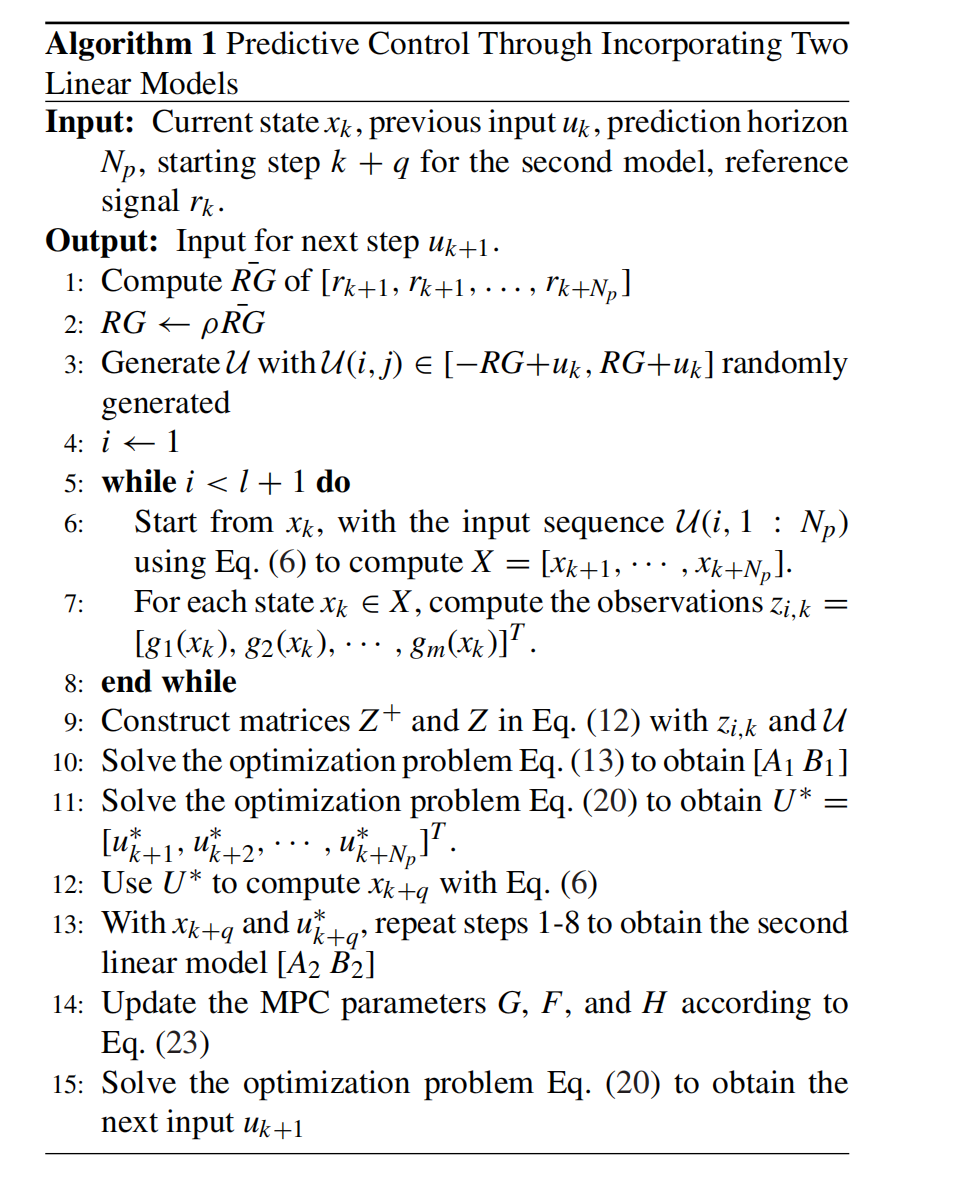
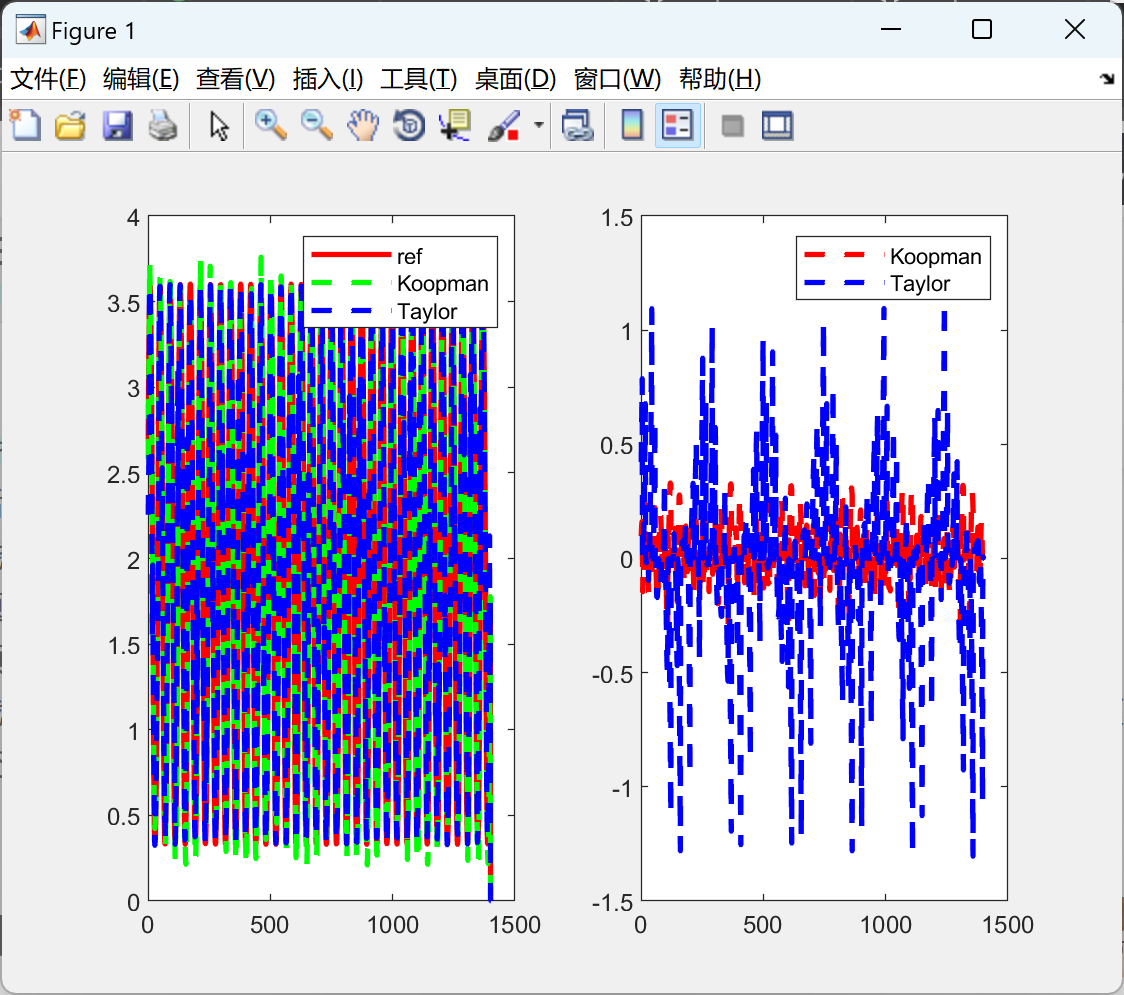
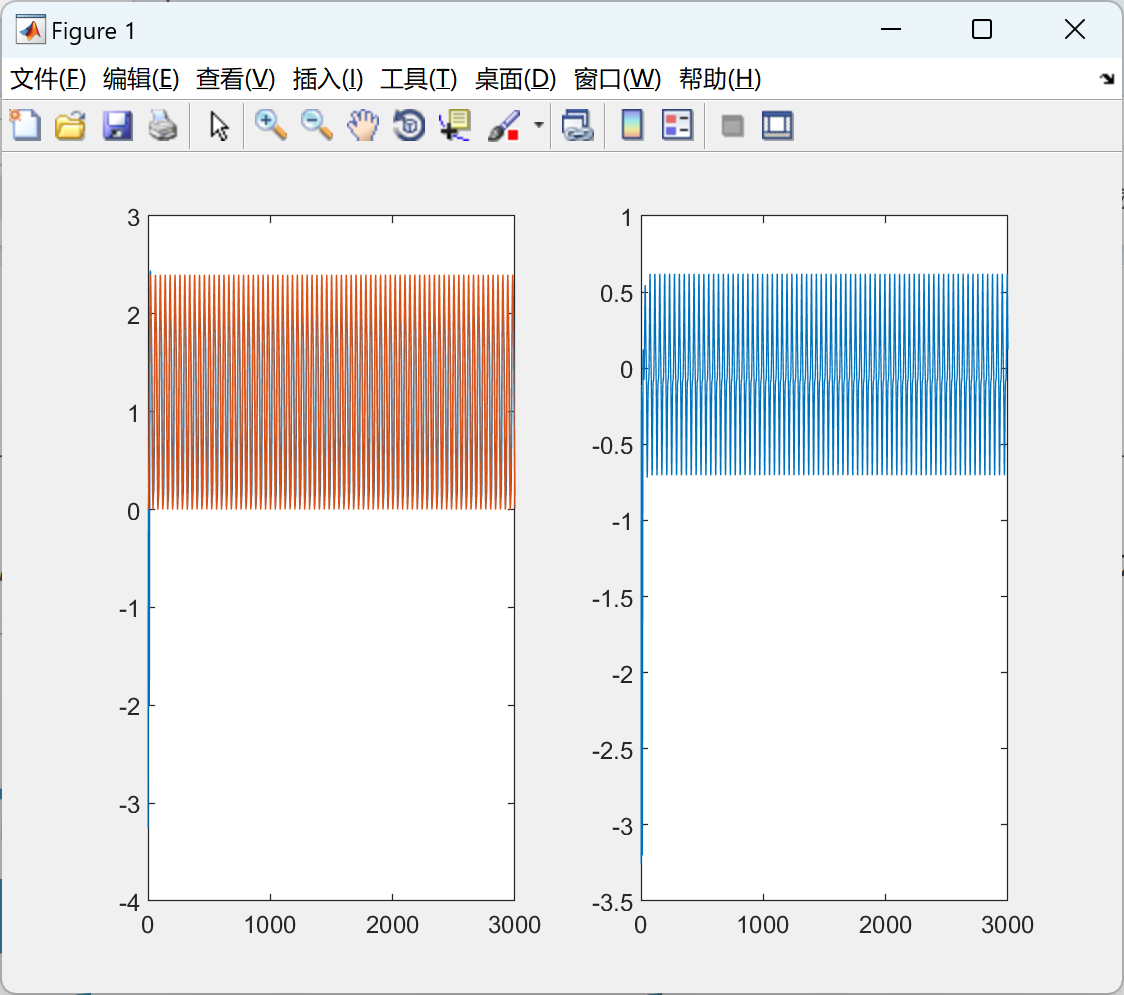
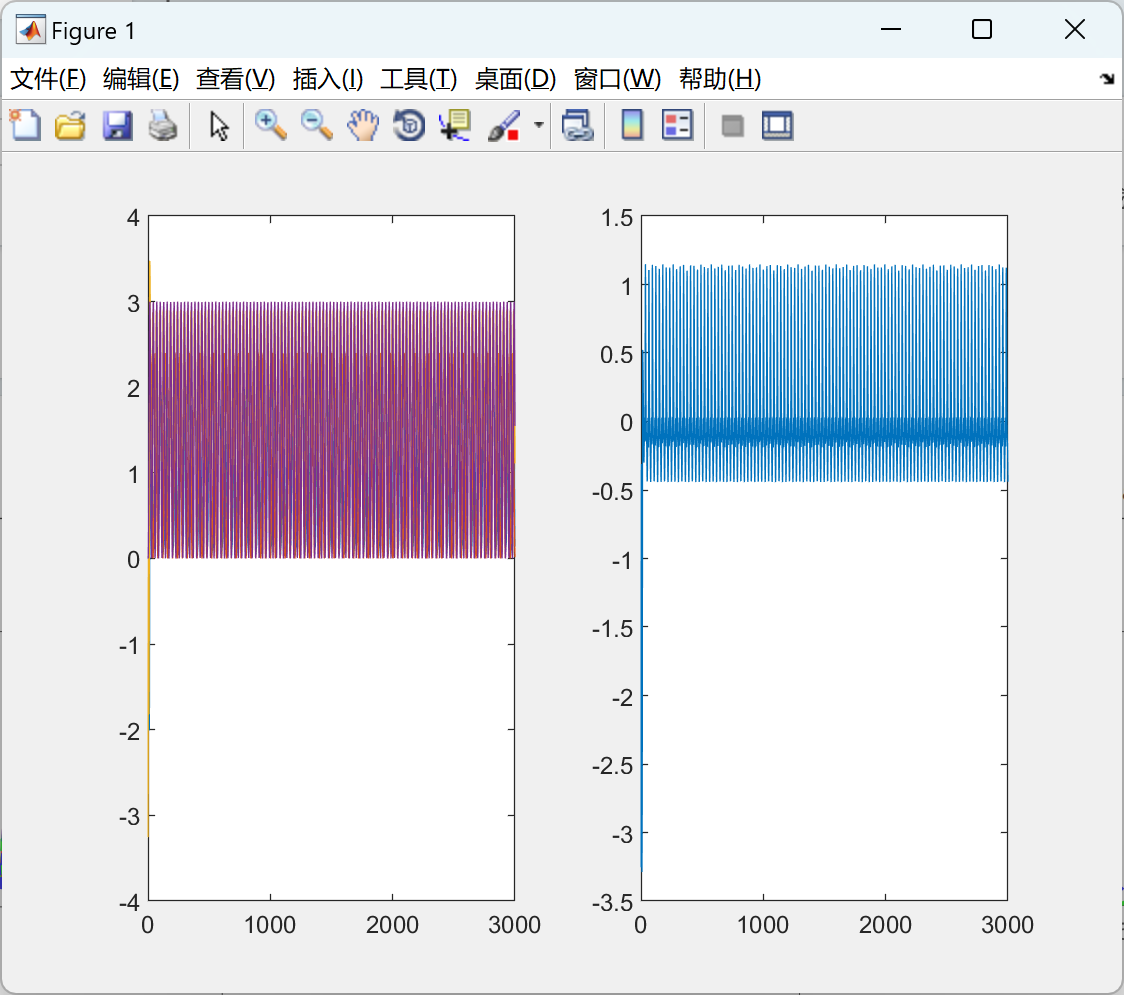
2.3 预测控制,使用Koopman算子进行线性化,两个线性模型
💥1 概述
文献来源:
摘要:
最近的研究表明,纳米定位系统(例如压电致动器(PEAs))的非线性动力学可以被循环神经网络(RNNs)准确捕捉。这项技术的一个直接应用是用于精密定位的PEA系统控制:将非线性RNN模型线性化,然后应用模型预测控制(MPC)。然而,由于常用的线性化方法(例如泰勒级数),所得到的线性系统仅在线性化点的小邻域内保证准确,因此控制带宽和控制性能相当有限。为了解决这个问题,我们提出了一种基于Koopman算子的线性化方法,然后使用所得到的线性参数变化模型进行预测控制。这种线性化方案可以显著减少MPC预测范围内的整体逼近误差,从而提高跟踪性能。我们通过两个应用验证了提出的方法——PEA的轨迹跟踪和原子力显微镜纳米压痕过程中聚合物的变形控制。
由于压电致动器(PEAs)的频率和幅度依赖非线性,设计宽带、高精度和计算效率高的实时控制器具有挑战性[1],[2]。虽然迭代学习或重复控制可以实现对PEA的高带宽和高精度控制[3],[4],但它们不是实时控制器,即不能用于跟踪非周期性轨迹。困难在于获得具有小建模不确定性的高带宽模型。线性模型已广泛用于PEA跟踪,如滑模控制[5]、主动干扰抑制控制[6]等。然而,报告的控制带宽较低,通常小于100Hz,尤其在高频区域,精度不尽如人意。由于PEA系统本质上是非线性的,自然而然地使用非线性模型来捕捉系统动态。倒置模型,如Prandtl-Ishlinskii模型[7]、铁磁材料磁滞模型[8],已被用于补偿非线性。然而,建模带宽仍然有限。
最近,神经网络已被提出用于PEA系统动力学建模[9],[10]。其中,循环神经网络(RNN)是一种能够以更高准确性模拟非线性PEA动态的方法[10],基于它的非线性模型预测控制器的控制带宽可以达到数百Hz。然而,这种非线性模型预测控制器在计算上成本高且难以处理,因为必须解决一个非线性优化问题(通常是非凸的)。因此,本文关注改进基于RNN模型的控制器的计算效率。
另一种选择是通过线性化原始非线性系统来避免非线性优化问题。泰勒级数在非线性系统线性化中被广泛使用[13]。然而,缺点是近似精度仅在线性化点的小邻域内得到保证。因此,随着预测范围的增加,建模不确定性将增加,从而限制MPC的性能。反馈线性化和平坦性也可用于线性化,但它们对于一般非线性系统并不有效[14],[15]。其他选项包括Carleman线性化、“polyflow”和Koopman算子方法[16]–[18]。在这些方法中,只有Koopman方法是数据驱动的[19],[20]。
详细文章见第4部分。
📚2 运行结果
2.1 比较使用泰勒级数和Koopman算子进行线性化的准确性
2.2 预测控制,使用Koopman算子进行线性化,一个线性模型
2.3 预测控制,使用Koopman算子进行线性化,两个线性模型
2.4 预测控制,使用泰勒级数进行线性化
部分代码:
%simN=900;
%add a weight matrix We for the tracking error
dwe=1-(1:Nh)/Nh+0.1;
We=diag(dwe.^2);
We=eye(Nh);
for k=1:simN
%system dynamics
betak=bxn(1:Nf);
xk=bxn(Nf+1:Nf+Nrnn);
etak=bxn(Nf+Nrnn+1:end);
% uk(k)=(y1range(2)-y1range(1))/(x1range(2)-x1range(1))*(uk(k)-x1range(1))+y1range(1);
tmp=Cbar*betak/scale;
bxn=[Abar*betak+Bbar*uk(k);
tanh(W1*xk+B2+B1*tmp);
Ae*etak+scale*Be*(W2*xk+B3)]+Gall*ek1;
yk(k)=Call*bxn+ek1;
ek1=measn(k)*0;
%state estimation
%Sigma points
sqrtPk=chol(Pk,'lower');%cholesky factorization
xi=[xkhat repmat(xkhat,1,Nall)+gamma*sqrtPk repmat(xkhat,1,Nall)-gamma*sqrtPk];
%Time update
uk_1=uk(k);
betaki=xi(1:Nf,:);
xki=xi(Nf+1:Nf+Nrnn,:);
etaki=xi(Nf+Nrnn+1:end,:);
tmp=Cbar*betaki/scale;
xikk_1=[Abar*betaki+repmat(Bbar*uk_1,1,2*Nall+1);
tanh(W1*xki+repmat(B2,1,2*Nall+1)+B1*tmp);
Ae*etaki+scale*Be*(W2*xki+B3)]+repmat(Gall*ek,1,2*Nall+1);
xkhat_=sum(xikk_1*WimMat,2);
Pk_=Rv;
for k1=1:2*Nall+1
Pk_=Pk_+WicMat(k1,k1)*( (xikk_1(:,k1)-xkhat_)*(xikk_1(:,k1)-xkhat_)' );
end
ykk_1=Call*xikk_1;%row vector
ykhat_=sum(ykk_1*WimMat);%scalar
%Measurement update
Pykayka=Rn;%yka means yk with ~ above
for k1=1:2*Nall+1
Pykayka=Pykayka+WicMat(k1,k1)*( (ykk_1(:,k1)-ykhat_)*(ykk_1(:,k1)-ykhat_)' );
end
Pxkyk=zeros(Nall,1);
for k1=1:2*Nall+1
Pxkyk=Pxkyk+WicMat(k1,k1)*( (xikk_1(:,k1)-xkhat_)*(ykk_1(:,k1)-ykhat_)' );
end
Kk=Pxkyk/Pykayka;%Pxkyk*inv(Pykayka)
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1] Xie, Shengwen, and Juan Ren. "Recurrent-neural-network-based Predictive Control of Piezo Actuators for Trajectory Tracking." IEEE/ASME Transactions on Mechatronics (2019).
[2] Xie, Shengwen, and Juan Ren. "Linearization of Recurrent-neural-network-based models for Predictive Control of Nano-positioning Systems using Data-driven Koopman Operators" IEEE Access (2020). DOI:10.1109/ACCESS.2020.3013935.

















 400
400











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











