






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
机器人路径规划是指在多个机器人之间协作完成任务时,确定它们的运动轨迹以达到特定目标的过程。这种路径规划需要考虑到多个机器人之间的协调与合作,以及它们与环境的交互作用。多机器人路径规划旨在解决多个机器人协作完成任务时的路径规划问题。这些任务可能涉及到团队协作、资源共享、分布式搜索等,例如物流中心的货物分拣、无人机编队飞行、多机器人探索等。多机器人路径规划算法通常分为两种类型:集中式和分布式。集中式方法将所有机器人的信息集中处理,然后生成全局最优路径;而分布式方法则允许机器人之间直接交换信息,以协调运动轨迹。多机器人路径规划的优点包括能够提高任务执行效率、增强系统的鲁棒性、适应复杂环境等;缺点包括算法复杂度高、通信开销大、难以处理动态环境等挑战。多机器人路径规划广泛应用于各种领域,如工业自动化、物流配送、救援任务、智能交通等,为提高效率、降低成本、增强安全性提供了有效的解决方案。多机器人路径规划是一项重要的研究领域,涉及到多种算法和技术,旨在实现多个机器人之间的有效协作和任务执行。
📚2 运行结果
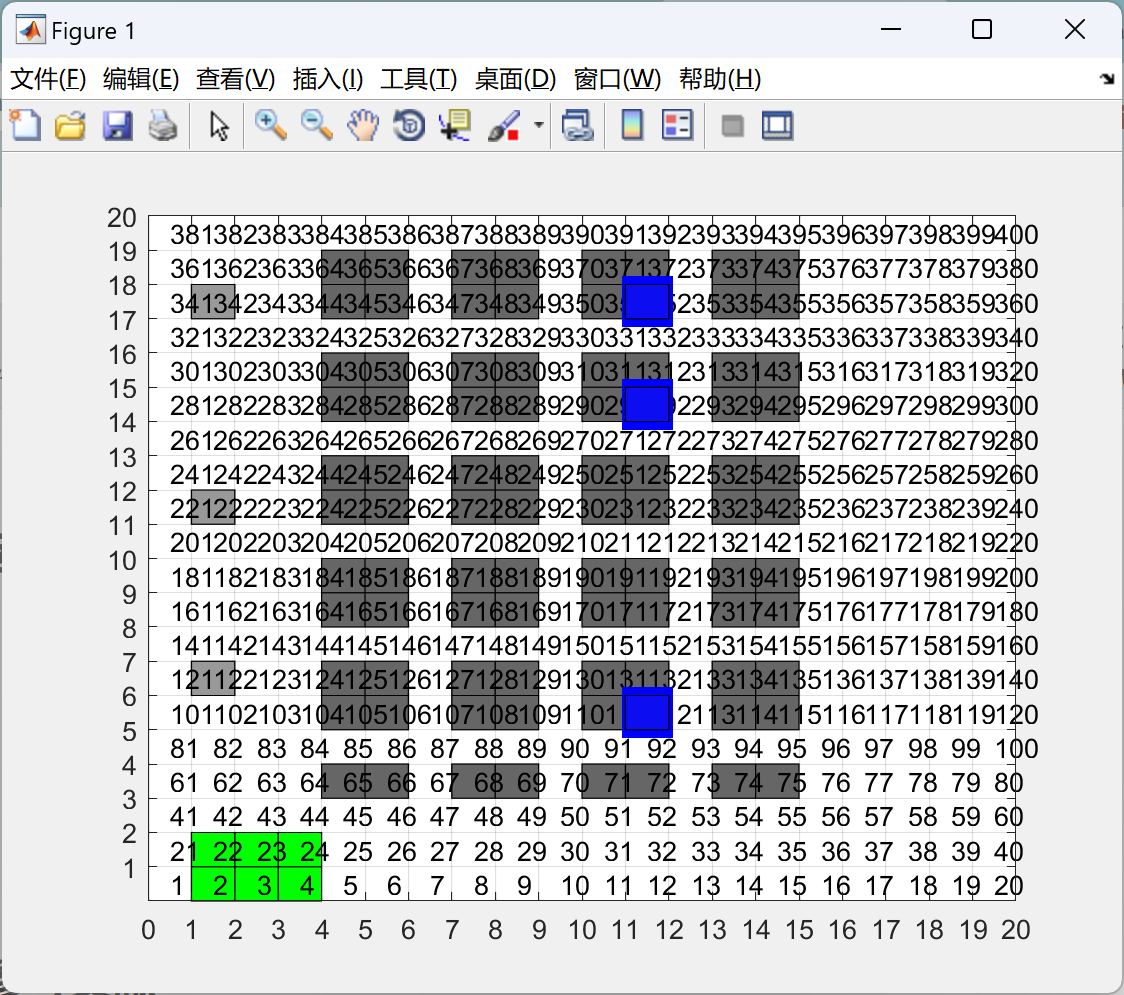
主函数部分代码:
%main函数,robot_number的数目目前支持2~6;
clear all;
close all;
clear variables;
clc;
robot_number=3;
[map,grid1,Nrow,Ncol,sorting_table,Obstacle]=initial_input();
% Obstacle_index=max(round(rand(1,30)*length(Obstacle)),1);
% Obstacle_index=randperm(length(Obstacle),10);
Obstacle_index=[48,24,70,43,34,15,59,12,58,35,46,61, 4,79,30,63,60,31,67,37, 6,20,50,73,72,56,47,14,78,62];
mission_list=[];start_node=[];
for i=1:length(Obstacle_index)
mission_list=[mission_list,Obstacle(Obstacle_index(i))];
end
mission=mission_list(1:robot_number);
%从N个数中不重复的选取一些数
% start_node=Obstacle(randperm(length(Obstacle),robot_number));
start_node=[166,352,5,12,120,220,240,23,24,25,26,27,28,29,30,31,32,33,34,35,36,37,38,39,40];
for k1=1:robot_number
robot_ID(k1)=robot();
robot_ID(k1).location=start_node(k1);
end
[scedule_table,undistributed_mission]=Schedule1(robot_ID,mission,Nrow,Ncol);
%scedule_table结果的第一行为任务的索引,格式大多数情况为1:length(mission), 第二行为该任务分配给的小车。
for i=1:length(scedule_table(1,:))
end_node(scedule_table(2,i))=mission(scedule_table(1,i));
end
for k2=1:robot_number
map3=map;
for map_i = 1:robot_number
if map_i~=k2
[ia,ib]=ind2sub([Nrow,Ncol],start_node(map_i));
map3(Ncol-ib+1,ia)=2;
[ia1,ib1]=ind2sub([Nrow,Ncol],end_node(map_i));
map3(Ncol-ib1+1,ia1)=2;
end
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]薛光辉,王梓杰,王一凡,等.基于改进人工势场算法的煤矿井下机器人路径规划[J/OL].工矿自动化:1-9[2024-06-01].https://doi.org/10.13272/j.issn.1671-251x.2024030014.
[2]林雪竹,王庭轩,郭丽丽,等.特征自适应的复杂曲面扫描路径生成方法[J].红外与激光工程,2024,53(05):125-140.
🌈4 Matlab代码实现


















 1112
1112

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











