






👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
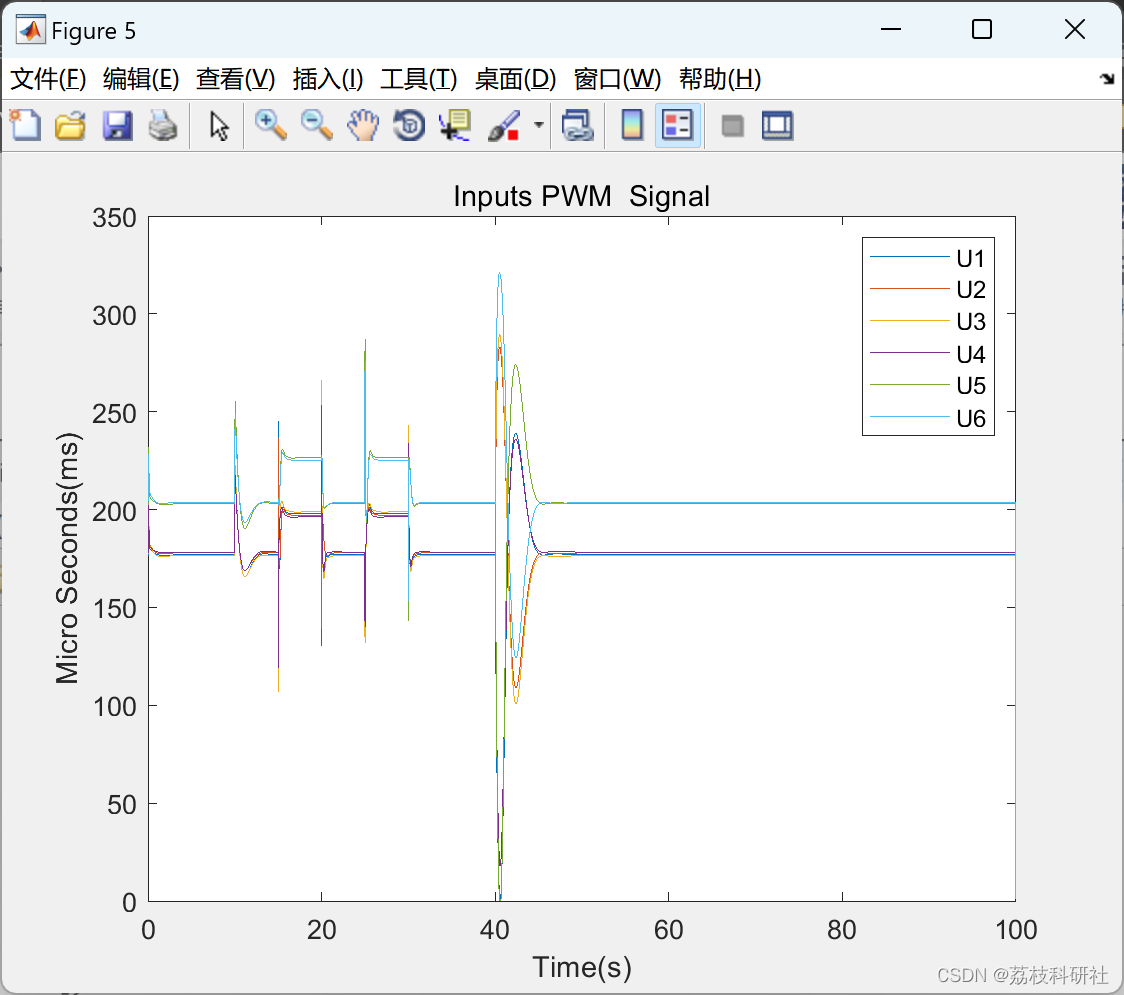
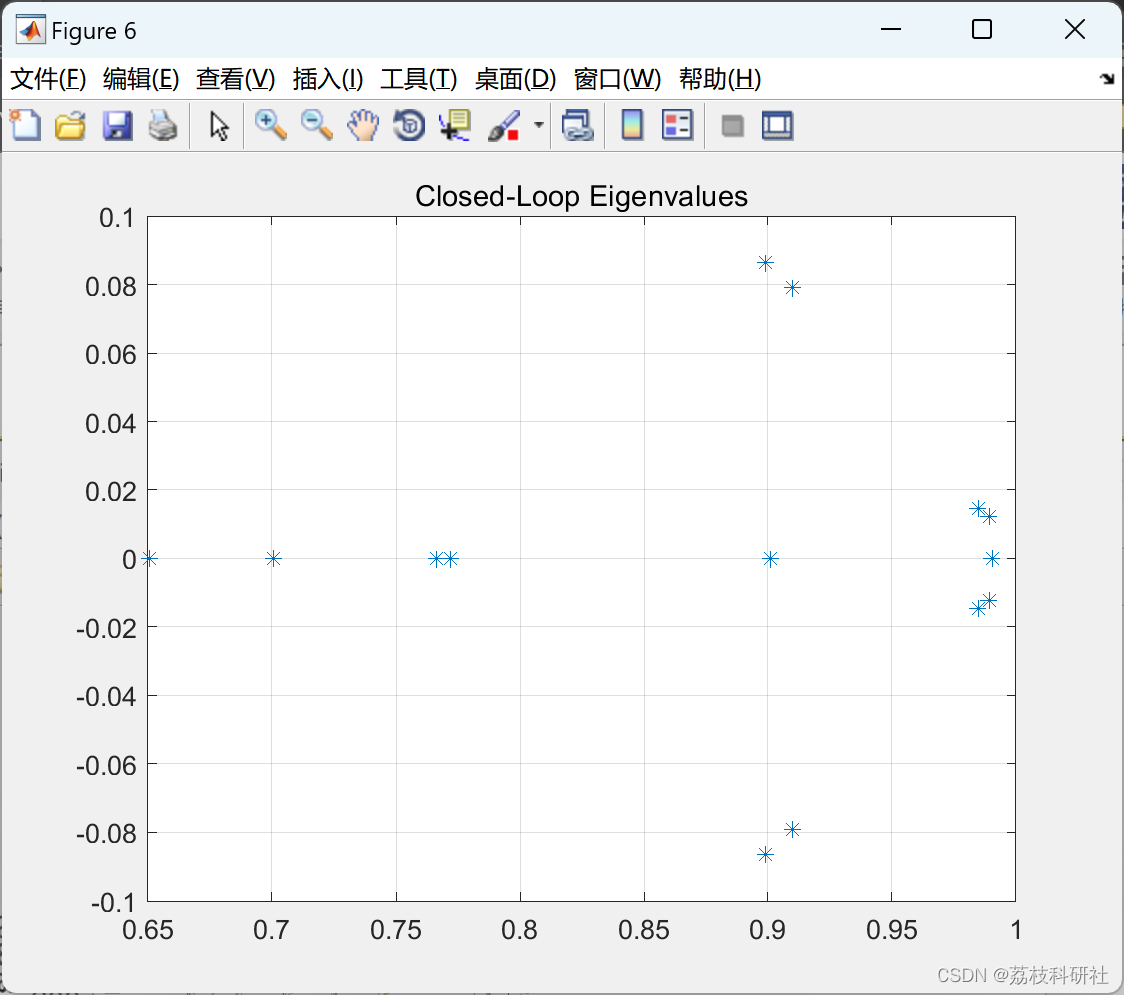
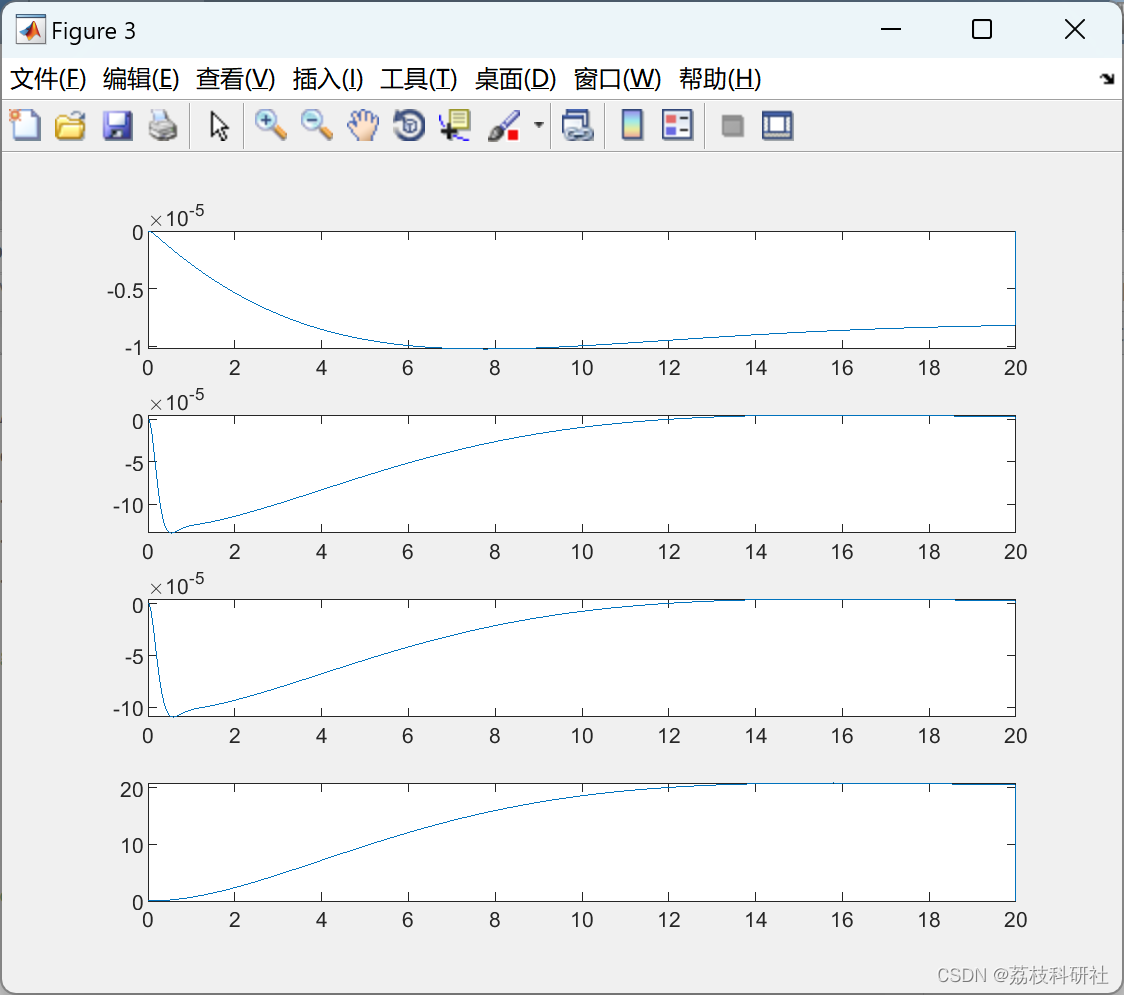
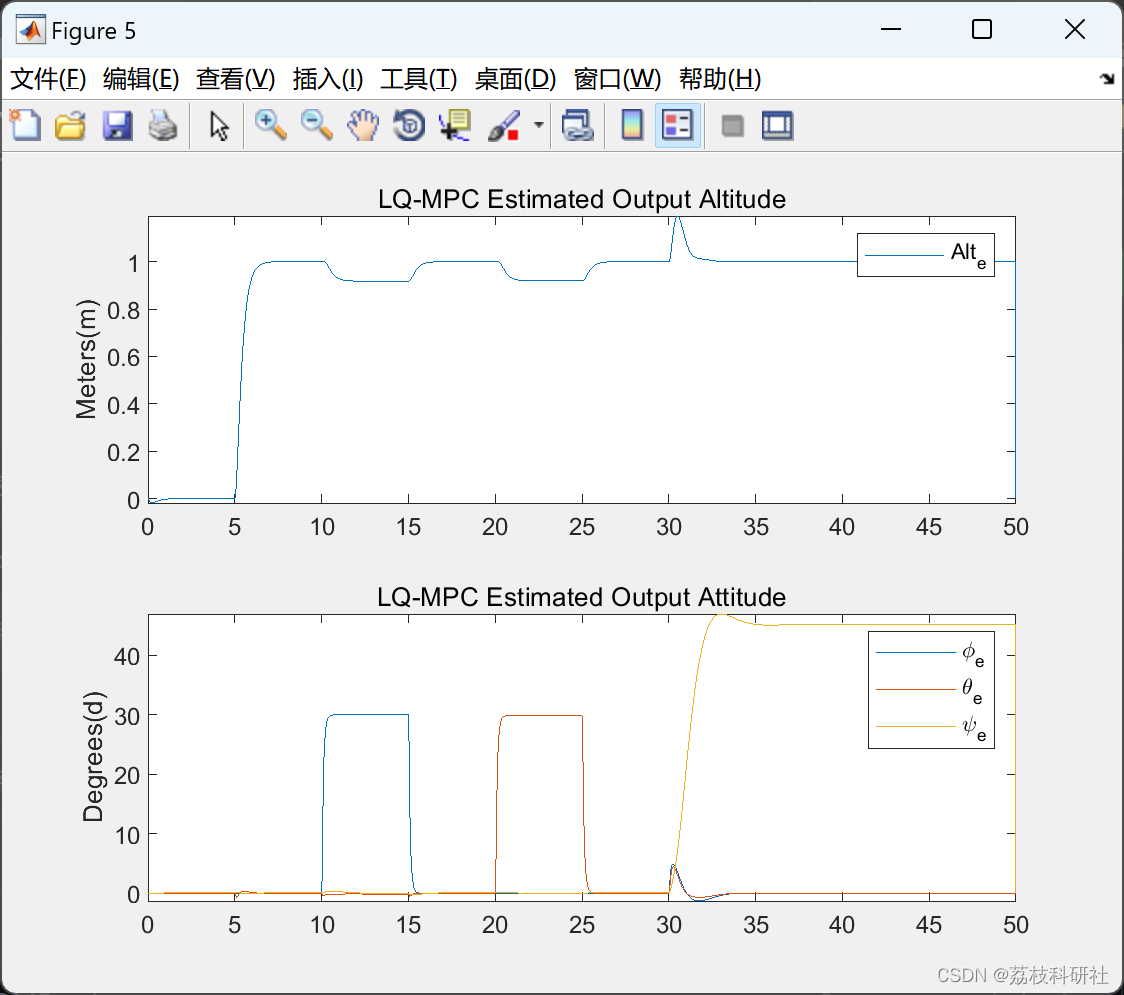
本文的基本框架围绕垂直/短距起降(VSTOL)模型飞机的控制软件的设计和开发展开。从该主题出发,推导出了非对称垂直起降多旋翼平台非线性动力学建模与仿真以及比例积分导数、线性二次高斯和模型预测控制算法等多种控制方案的开发。然后,这些控制方案将通过嵌入式微处理器单元在建模的多旋翼平台上实现。
这些目标分为多个目标和里程碑,每个目标和里程碑都必须实现,才能实现所概述的目标的全部范围。这些目标大致可分为两类:
基本目标
- 开发一个表示多旋翼飞机动力学的数学模型。
- 开发工艺品行为的动态模拟。
- 开发反馈控制定律:线性二次高斯(LQG)。
- 使用数学模型在模拟中研究反馈控制定律,以实现行为目标。
- 开发飞行控制软件以与传感器接口并实施控制法则。
- 在嵌入式微处理器单元上实现飞行控制软件。
- 将控制器安装到多旋翼平台上。
- 讨论仿真和硬件实现之间的性能比较结果。
研究内容
- 研究模型预测控制(MPC)方案在仿真中的应用。
- 将MPC方案合并并实施到飞行控制软件中。
- 讨论 LQG 和 MPC 实现之间的差异
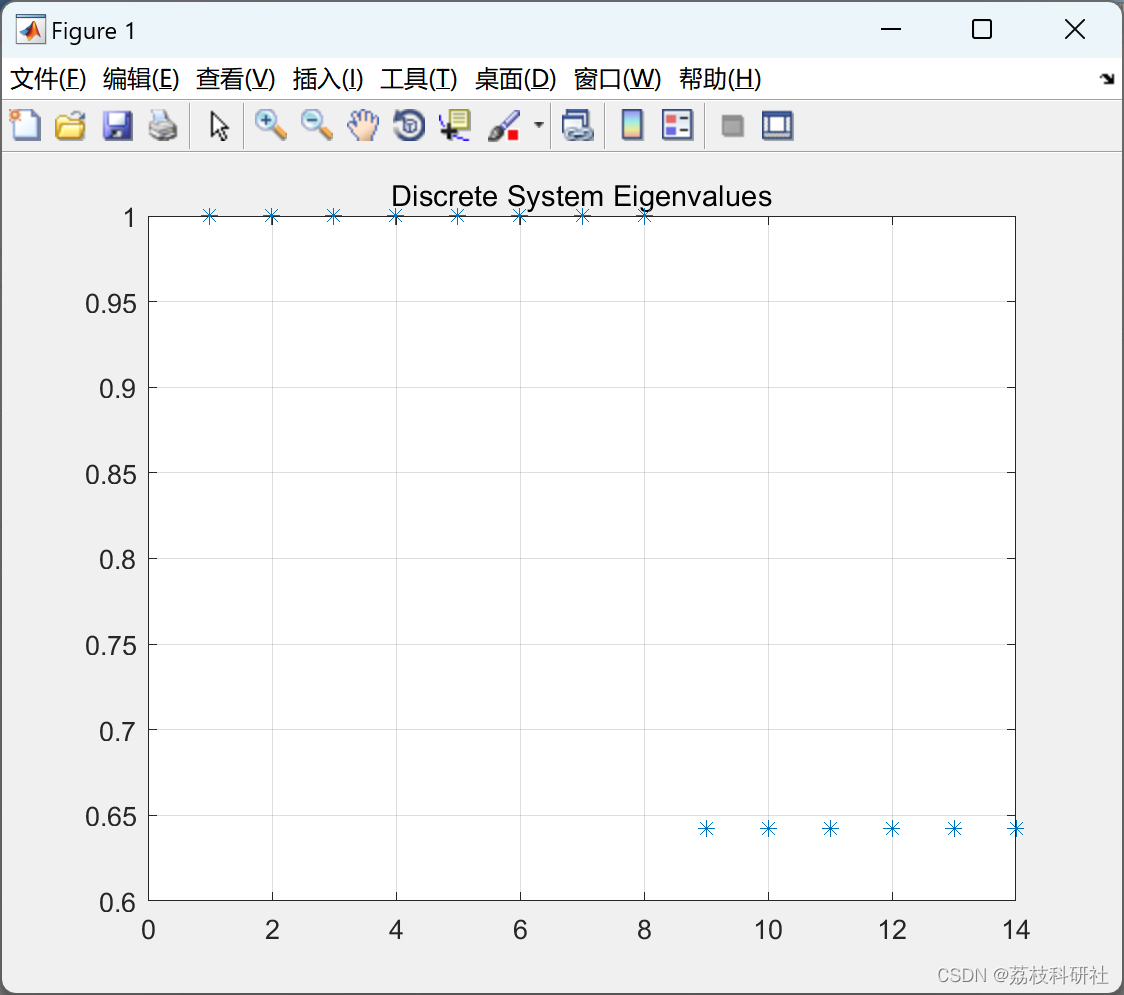
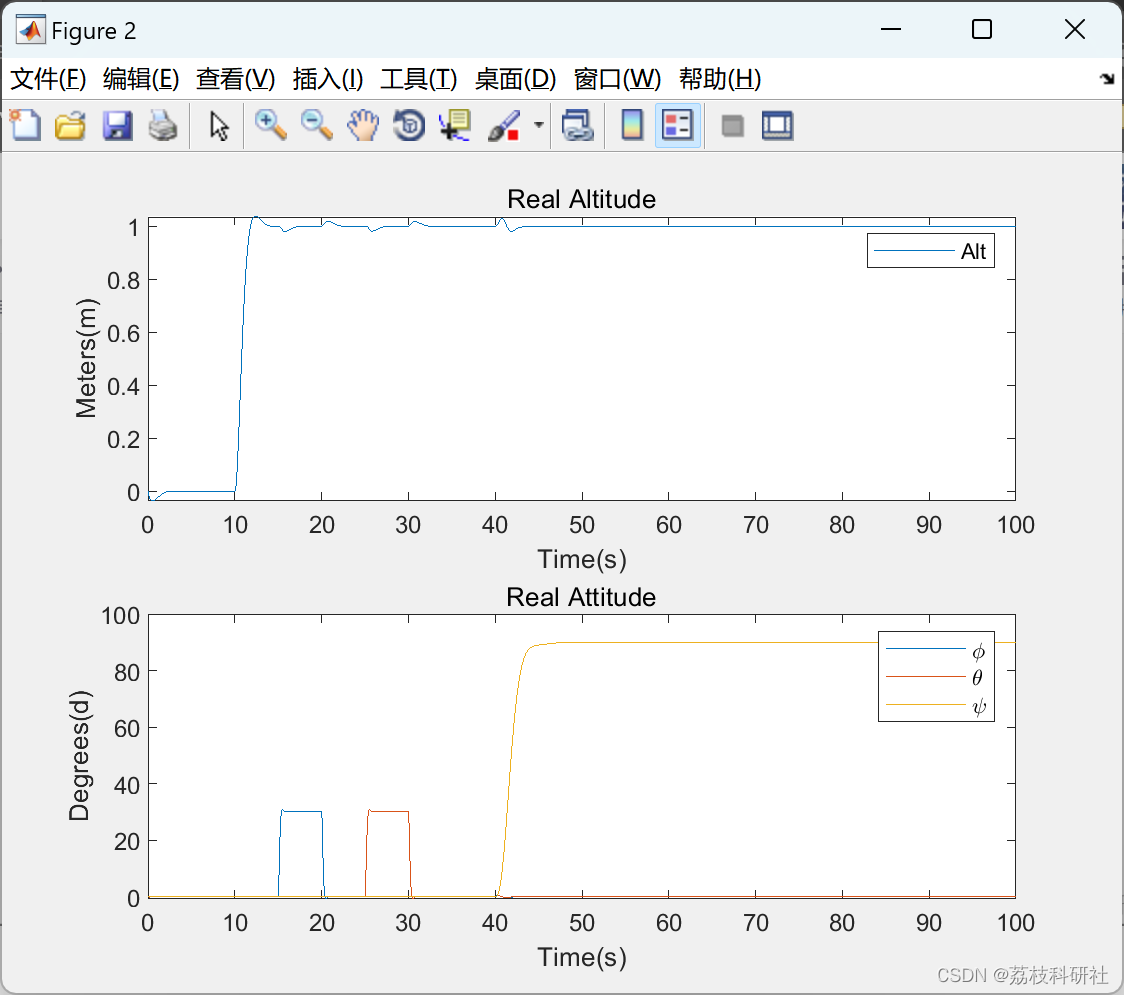
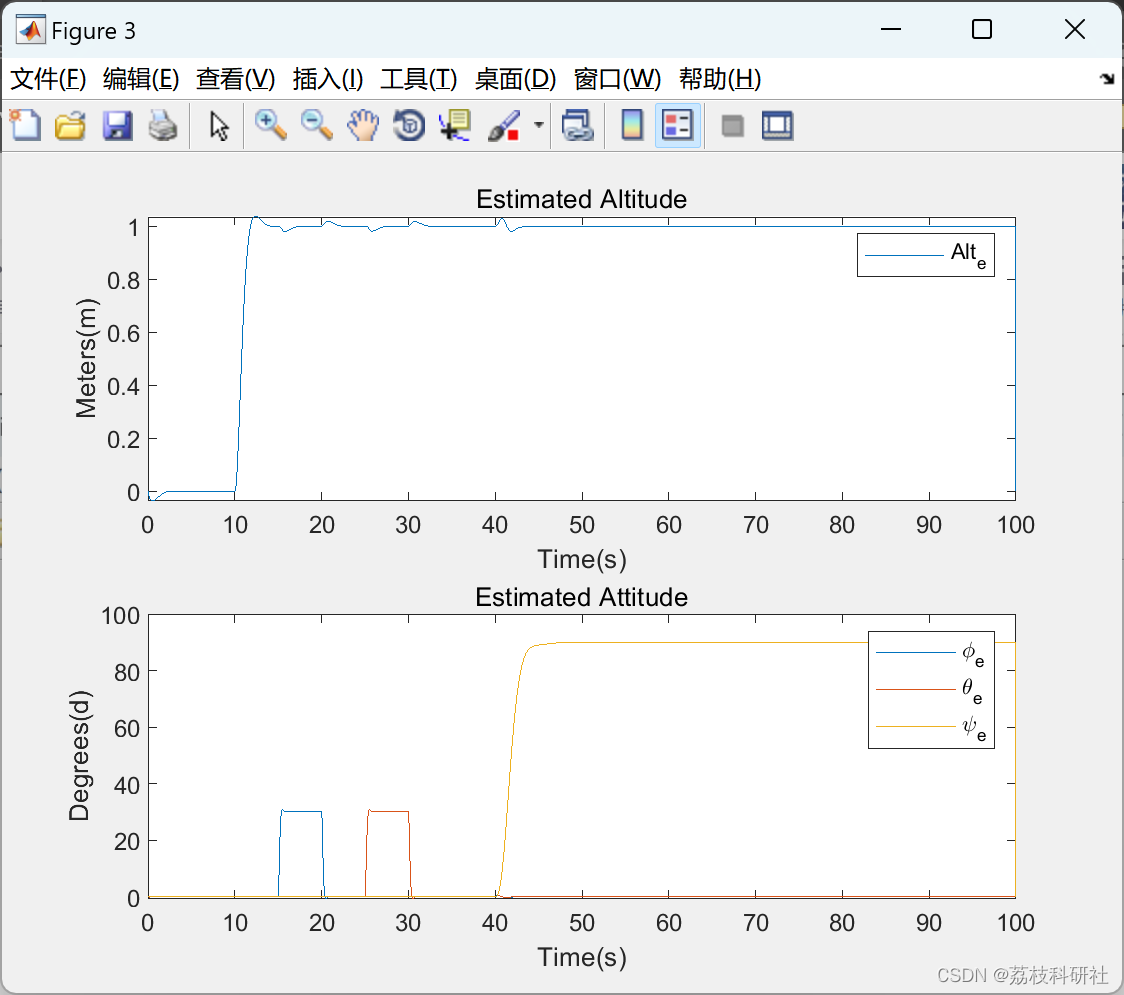
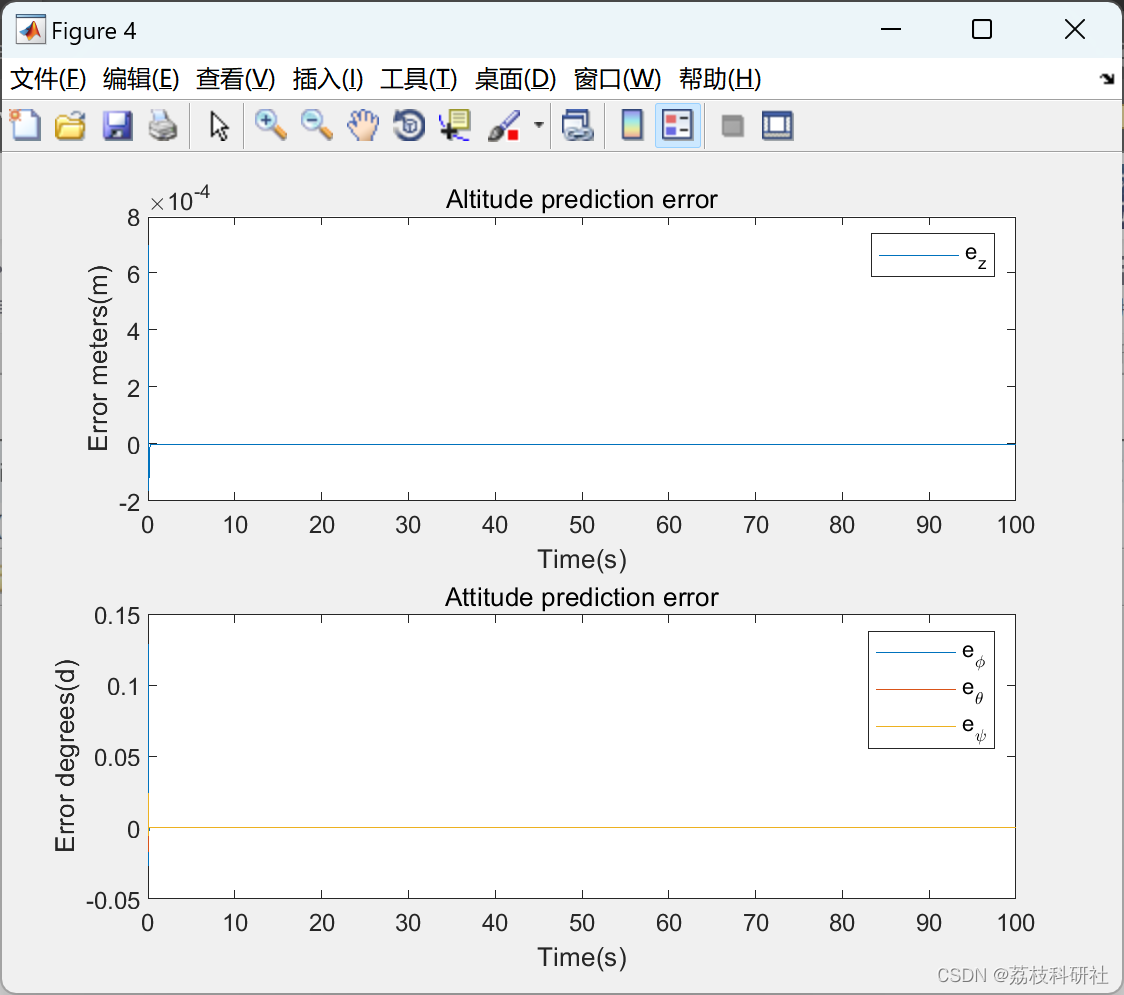
📚2 运行结果

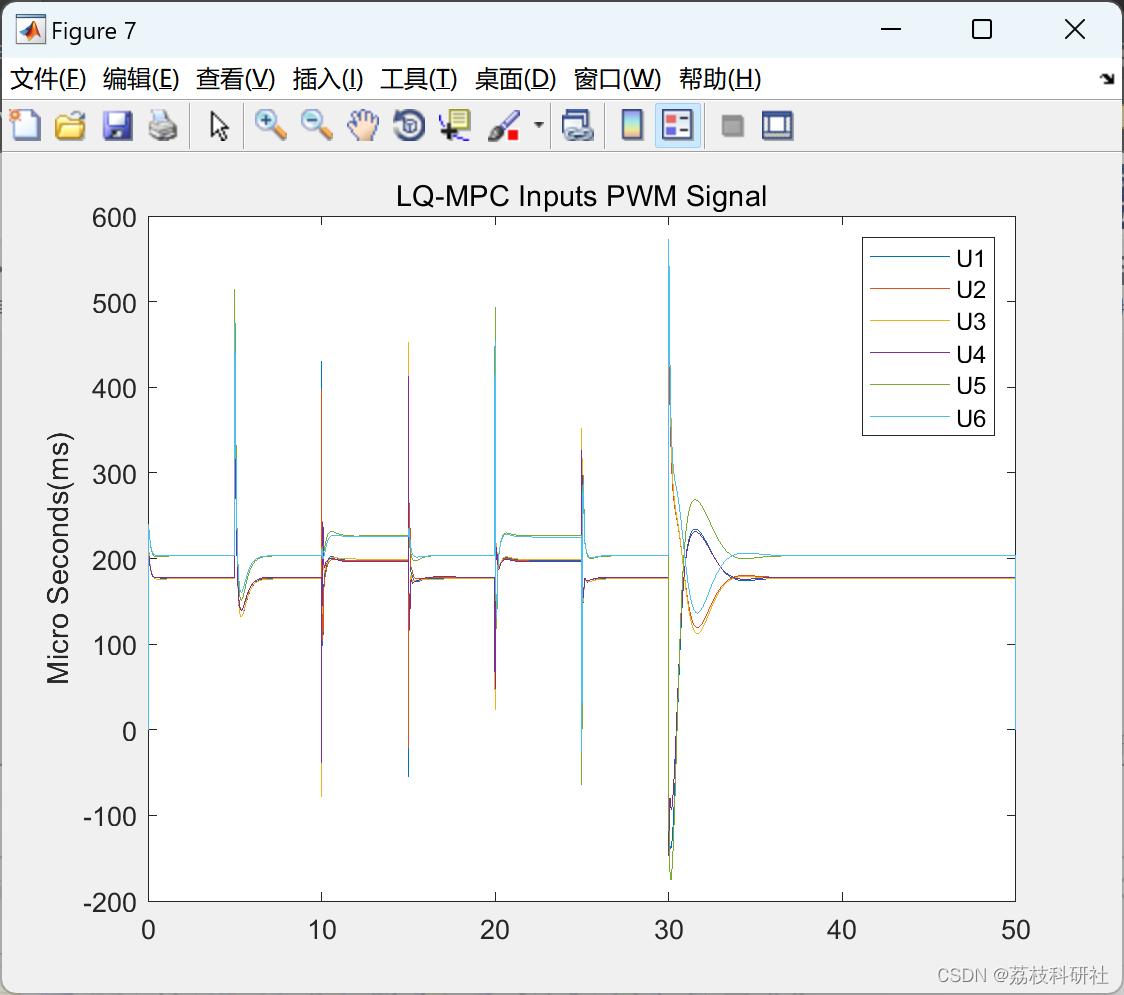
部分代码:
close all; % close all figures
clear; % clear workspace variables
clc; % clear command window
format short;
%% Mass of the Multirotor in Kilograms as taken from the CAD
M = 1.455882;
g = 9.81;
%% Dimensions of Multirotor
L1 = 0.19; % along X-axis Distance from left and right motor pair to center of mass
L2 = 0.18; % along Y-axis Vertical Distance from left and right motor pair to center of mass
L3 = 0.30; % along Y-axis Distance from motor pair to center of mass
%% Mass Moment of Inertia as Taken from the CAD
Ixx = 0.014;
Iyy = 0.028;
Izz = 0.038;
%% Motor Thrust and Torque Constants (To be determined experimentally)
Kw = 0.85;
Ktau = 7.708e-10;
Kthrust = 1.812e-07;
Kthrust2 = 0.0007326;
Mtau = (1/44.22);
Ku = 515.5*Mtau;
%% Air resistance damping coeeficients
Dxx = 0.01212;
Dyy = 0.01212;
Dzz = 0.0648;
%% Equilibrium Input
%W_e = sqrt(((M*g)/(3*(Kthrust+(Kw*Kthrust)))));
%W_e = ((-6*Kthrust2) + sqrt((6*Kthrust2)^2 - (4*(-M*g)*(3*Kw*Kthrust + 3*Kthrust))))/(2*(3*Kw*Kthrust + 3*Kthrust));
%U_e = (W_e/Ku);
U_e = [176.1,178.5,177.2,177.6,202.2,204.5]';
W_e = U_e*Ku;
%% Define Discrete-Time BeagleBone Dynamics
T = 0.01; % Sample period (s)- 100Hz
ADC = 3.3/((2^12)-1); % 12-bit ADC Quantization
DAC = 3.3/((2^12)-1); % 12-bit DAC Quantization
%% Define Linear Continuous-Time Multirotor Dynamics: x_dot = Ax + Bu, y = Cx + Du
% A = 14x14 matrix
A = [0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0;
0, 0, 0, 0, 0, 0, 0, 0, 2*Kthrust*W_e(1)/M, 2*Kw*Kthrust*W_e(2)/M, 2*Kthrust*W_e(3)/M, 2*Kw*Kthrust*W_e(4)/M, 2*Kthrust*W_e(5)/M, 2*Kw*Kthrust*W_e(6)/M;
0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0;
0, 0, 0, 0, 0, 0, 0, 0, L1*2*Kthrust*W_e(1)/Ixx, L1*2*Kw*Kthrust*W_e(2)/Ixx, -L1*2*Kthrust*W_e(3)/Ixx, -L1*2*Kw*Kthrust*W_e(4)/Ixx, 0, 0;
0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0, 0, 0;
0, 0, 0, 0, 0, 0, 0, 0, -L2*2*Kthrust*W_e(1)/Iyy, -L2*2*Kw*Kthrust*W_e(2)/Iyy, -L2*2*Kthrust*W_e(3)/Iyy, -L2*2*Kw*Kthrust*W_e(4)/Iyy, L3*2*Kthrust*W_e(5)/Iyy,L3*2*Kw*Kthrust*W_e(6)/Iyy;
0, 0, 0, 0, 0, 0, 0, 1, 0, 0, 0, 0, 0, 0;
0, 0, 0, 0, 0, 0, 0, 0, -2*Ktau*W_e(1)/Izz, 2*Ktau*W_e(2)/Izz, 2*Ktau*W_e(3)/Izz, -2*Ktau*W_e(4)/Izz, -2*Ktau*W_e(5)/Izz, 2*Ktau*W_e(6)/Izz;
0, 0, 0, 0, 0, 0, 0, 0, -1/Mtau, 0, 0, 0, 0, 0;
0, 0, 0, 0, 0, 0, 0, 0, 0, -1/Mtau, 0, 0, 0, 0;
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, -1/Mtau, 0, 0, 0;
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, -1/Mtau, 0, 0;
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, -1/Mtau, 0;
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Alexander Dada,Mechatronics Engineer.Linear Control for Asymmetric Multirotor Unmanned Aerial Vehicles
[2][1]徐超.多旋翼无人机在山区应急救援中的应用分析[J].南方农机,2023,54(03):4-6+14.
[3]王磊,张启亮,翁明善.基于改进YOLOv4算法的小型多旋翼无人机目标检测[J].探测与控制学报,2022,44(05):125-131.

















 2281
2281











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











