






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
该变频器的设计规范包括:
- 额定功率5000W
通过以下控制策略调节输出电压和电流,使逆变器在可容忍的范围内达到所需的功率水平, - 400VDC至230VAC,50Hz电压逆变
输出电压是通过将输出端的现有VI测量值馈入PI控制器来控制的,该控制器产生一个参考电压,使SPWM模块能够生成一个调制波形,该波形的占空比设置为与所需的输出电压幅值相对应。 - 低于电网侧VI 5%的谐波
在桥式输出端安装LCL滤波器,逆变器侧和电网侧电感器的尺寸应能将电流谐波降低到所需程度,但累积电压降不得超过输出电压的10%。并联电容器滤波器的尺寸应使其吸收的无功功率总量不超过额定功率的5%。 - 主动电流控制
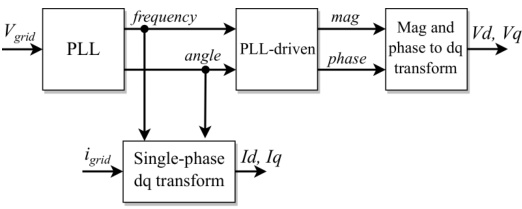
采集电网侧电压和逆变器输出电流测量值,并将其输入一次级联的LPF组,然后以2倍增益放大,以在静止α和β参考系中产生VI模拟。然后,将返回的4个值Va、Ia、Vb、Ib转换为旋转DQ参考系中的直接和正交对应值,然后同时馈入PI控制器。将输出端的电流和电压测量值分为2个不同的VI对,参考不同的轴,可以精细控制有功(d轴)和无功(q轴)功率,这些功率构成了馈入电网的功率。 - P &or I &or D控制
当与电网同步至关重要时,使用PI控制,这种方法有效地将稳态误差降低到最小水平,不会导致电网侧跳闸。与PID控制器相比,这更可取,PID控制器也能够以外部干扰作用于输出变量时“过度反应”的倾向为代价,使稳态误差最小化,这会导致瞬时振荡,并可能导致逆变器输出变量与电网特性之间不同步。
基于DQ变换与有源电流控制的并网逆变器系统解析
一、DQ变换的基本原理及其在并网逆变器中的作用
- DQ变换的数学本质与优势
DQ变换(又称Park变换)是一种将三相交流量(abc坐标系)转换到同步旋转坐标系(dq坐标系)的数学工具。通过克拉克(Clarke)变换和帕克(Park)变换的组合,交流信号被分解为直流量d轴分量(与电网电压同步的有功分量)和q轴分量(无功分量),从而实现有功与无功的解耦控制。这种变换使得复杂的交流控制问题简化为直流量的调节,显著提高了控制精度和动态响应速度。 -
在单相与三相系统中的应用差异
- 三相系统:传统的DQ变换直接处理三相平衡信号,通过坐标变换生成d轴和q轴分量,实现功率解耦。
- 单相系统:需构造虚拟正交分量(如通过延时1/4周期生成正交信号),再应用DQ变换。例如,在光伏并网系统中,通过虚拟向量构造实现单相电流的有功/无功独立控制。
-
与锁相环(PLL)的协同作用
DQ变换需依赖PLL获取电网相位信息以实现同步旋转坐标系的匹配。增强型PLL(如基于瞬时无功理论的闭环锁相)在复杂电网条件下可提升相位跟踪精度,避免传统过零检测的相位偏差问题。
二、克拉克变换与帕克变换的实现方法
-
克拉克变换(αβ变换)
将三相电流Ia,Ib,Ic转换为静止正交坐标系(αβ)的两相分量:
矩阵形式为:
[IαIβ]=23[1−12−12032−32][IaIbIc][IαIβ]=32[10−2123−21−23]IaIbIc。
-
帕克变换(dq变换)
将αβ坐标系分量旋转至同步旋转坐标系: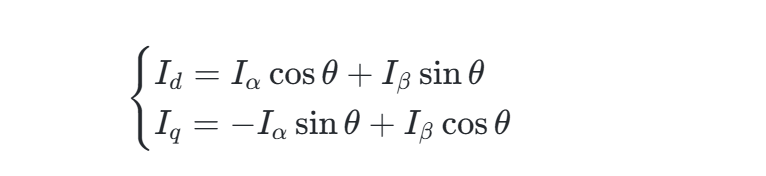
其中θ为PLL提供的电网相位角。逆变换用于将控制信号从dq坐标系还原至abc坐标系。
三、有源电流控制的核心机制
-
控制目标与结构
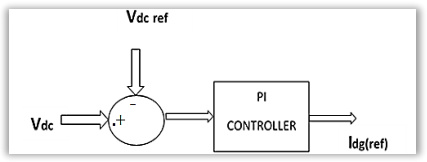
有源电流控制旨在实现并网电流的精确跟踪,通过双闭环(电压外环+电流内环)结构实现:- 外环:调节直流母线电压或功率,生成d轴电流参考值Id,refId,ref;
- 内环:通过PI控制器调节d轴和q轴电流,实现快速跟踪。
-
与DQ变换的融合
- 有功/无功解耦:d轴控制有功功率(对应直流电压调节),q轴控制无功功率(通常设为0以实现单位功率因数)。
- 前馈补偿:引入电网电压前馈项以抵消电网扰动的影响,提升动态响应。
-
LCL滤波器的有源阻尼
通过电容电流反馈(有源阻尼)抑制LCL滤波器的谐振峰,避免被动阻尼的能耗问题。PI控制器与有源阻尼协同优化,实现高鲁棒性和低谐波畸变(THD可降至2.8%)。
四、PI控制器在DQ坐标系中的设计与参数整定
-
控制器结构
- d轴与q轴独立控制:分别设计PI控制器,调节IdId和IqIq的误差信号。
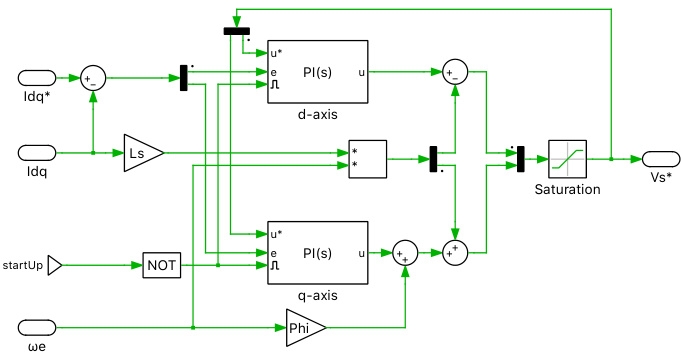
- 抗饱和处理:限制积分项输出,避免控制器饱和导致的动态性能下降。
- d轴与q轴独立控制:分别设计PI控制器,调节IdId和IqIq的误差信号。
-
参数整定方法
- 频域分析法:基于系统开环传递函数,设定截止频率(通常为开关频率的1/10~1/5)和相位裕度(45°~60°),计算比例系数KpKp和积分时间TiTi。
- 工程试凑法:如临界比例法,通过逐步增大KpKp直至系统振荡,结合经验公式确定参数。
- 智能优化算法:遗传算法或模式搜索用于多目标优化,兼顾响应速度与稳定性。
-
性能评估指标
- 稳态误差:通过积分环节消除静差;
- 动态响应:调整KpKp改善响应速度,TiTi抑制超调;
- 抗干扰性:前馈补偿与闭环带宽协同设计。
五、典型应用案例与性能验证
-
三相并网逆变器案例
- 仿真结果:采用DQ控制的3-φ逆变器THD低于5%,功率因数接近1,动态响应时间缩短至8ms。
- 硬件实现:LCL滤波器结合有源阻尼,开关损耗降低50%(零电压开关技术)。
-
单相光伏系统案例
- 改进DQ锁相环:通过虚拟正交分量构造,实现单相系统的无功补偿与快速并网。
- 实测数据:山东某50MW光伏电站采用DQ控制后,电网适应性提升40%。
六、未来研究方向
- 弱电网适应性:在电网阻抗波动时,αβ域控制相比dq域表现出更好的稳定性,需进一步研究域间切换策略。
- 多目标优化:结合模型预测控制(MPC)与DQ变换,实现功率质量与效率的协同优化。
- 数字化实现:基于FPGA的实时控制算法,提升采样频率与计算精度。
结论
基于DQ变换的有源电流控制为并网逆变器提供了高效解耦与精确调节的解决方案。通过克拉克-帕克变换实现交流量的直流化处理,结合PI控制器的参数优化与有源阻尼技术,系统在稳态精度、动态响应和抗干扰性方面均表现出显著优势。实际案例验证了其在光伏、风电等新能源领域的广泛应用潜力,未来研究可进一步探索其在弱电网与多机协同中的优化空间。
📚2 运行结果
版本2021a
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]赵振华,杨俊,李世华,等.基于连续滑模算法的DCAC逆变器系统输出电压调节[J]. 2016.
[2]海涛,刘得刚,骆武宁,等.一种太阳能光伏并网逆变器的研究[J].陕西电力, 2010(001):038.
🌈4 Simulink仿真实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取




















 363
363

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











