






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
基于事件触发机制的孤岛微电网二次电压与频率协同控制仿真模型研究
💥1 概述

https://ieeexplore.ieee.org/document/8813102/citations#citations基于事件触发机制的孤岛微电网二次电压与频率协同控制仿真模型研究
关于孤岛微电网的二次电压与频率协同控制的仿真模型研究。这是一个在电力系统领域很重要的课题,特别是针对孤岛微电网这种小范围的自给自足型电力系统。
孤岛微电网是指在主电网断开或者独立运行的情况下,能够自主运行的小型电力系统。二次电压与频率协同控制是确保这种微电网稳定运行的重要控制策略。
在这个研究中,研究者可能会建立一个仿真模型,模拟孤岛微电网中各种设备的运行和交互,包括发电机、负载、能量存储系统等。通过事件触发机制,系统可以在需要时触发特定的控制动作,比如调节发电机的输出功率或者能量存储系统的放电。
二次电压与频率协同控制的目标是保持微电网内部的电压和频率在稳定范围内。电压控制通常包括调节发电机的电压输出或者调节配电系统的电压,以保持在设定值附近。频率控制则是调节发电机的输出功率来保持微电网整体的频率稳定。
通过仿真模型,研究者可以评估不同控制策略对孤岛微电网稳定性的影响,优化控制参数,提高系统的响应速度和稳定性。
这是一个非常具有挑战性但也非常有意义的研究方向,特别是在推动可再生能源在微电网中的应用和提高微电网自身的可靠性方面。
孤岛微电网的二次电压与频率协同控制模型是一种控制方法,旨在利用事件触发机制实现对二次电压和频率的协同控制。这个模型有助于微电网系统保持稳定运行,提高系统的鲁棒性和效率。在这个模型中,事件触发机制被用来触发控制器的更新,以降低控制器的计算和通信成本,并保持系统性能。通过这种方法,可以有效地控制孤岛微电网的二次电压和频率,提高系统的响应速度和稳定性。
该模型在Simulink中进行仿真,用于4机并联孤岛微电网模型,在原系统基础上增加了二次控制方式,以校正因负荷接入而导致的一次控制偏差。此外,该系统采用充分的事件触发方式对二次电压和频率进行控制,有效减少了控制器的操作次数。除此之外,该模型还应用了神经网络算法,以确保在各种运行工况下系统可靠运行。
模型中逆变器的初级控制采用下垂控制,模拟了同步发电机的下垂特性。基于微电网感性输出电阻的近似或虚拟电阻的实现,在下垂特性中规定了电压幅值与无功功率、频率与有功功率之间的线性关系。
一、孤岛微电网的基本结构与运行挑战
孤岛微电网由分布式电源(DG)、储能系统、负荷及控制单元构成,脱离主网独立运行。其典型架构包含不可控型DG(如光伏、风电)、可控型DG(如微型气轮机、柴油发电机)及储能系统(如蓄电池),通过逆变器、变流器等设备实现交直流电能转换。核心挑战在于:
- 电压与频率波动:新能源发电的间歇性(如风速、光照变化)和负荷突变导致功率失衡,引发电压/频率偏差。
- 控制复杂度高:传统下垂控制虽能实现初步功率分配,但会导致电压和频率偏离额定值,需二次控制进行修正。
- 通信资源限制:集中式控制依赖全局通信,存在单点故障风险;分布式控制虽提升可靠性,但频繁通信增加带宽压力。
二、事件触发机制与协同控制策略的结合优势
事件触发机制(Event-Triggered Mechanism, ETM)通过仅在预设条件(如误差超过阈值或系统动态变化显著)时触发控制更新,显著减少通信与计算开销,适用于资源受限的孤岛微电网场景。其与二次电压/频率协同控制的结合优势包括:
- 通信效率提升:传统周期通信下,4机并联系统的通信次数可降低99%。
- 动态性能保障:通过事件触发阈值设计,在减少通信的同时维持控制精度。例如,仿真显示二次控制投入后,电压/频率在负载突变时仍稳定于额定值。
- 抗干扰能力增强:结合滑模控制或自适应算法,可应对网络攻击、时滞等不确定性。
三、协同控制策略设计与关键技术
-
分层控制架构:
- 一次控制:采用下垂控制模拟同步发电机特性,建立有功-频率(P-f)、无功-电压(Q-V)的线性关系。
- 二次控制:基于多智能体一致性算法,通过稀疏通信协调各DG,恢复电压/频率至标称值。例如,文献[11]提出牵制控制策略,实现频率、电压调节与功率均分。
- 事件触发模块:设计动态触发条件(如误差积分或李雅普诺夫函数变化),仅在必要时更新控制器状态。
-
核心算法与优化:
- 有限时间收敛:相比传统无限时间控制,有限时间算法(如反馈线性化)可加速收敛,提升暂态响应。
- 状态约束处理:采用障碍函数限制电压/频率波动范围,确保安全运行。
- 功率均分优化:通过虚拟阻抗补偿或模糊控制减少线路阻抗差异导致的环流问题。
四、仿真模型构建与验证
-
建模工具选择:
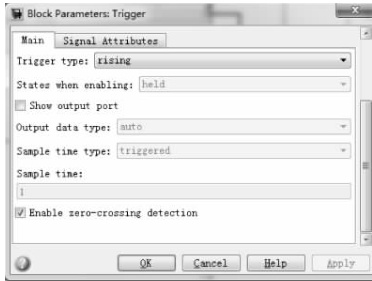
- MATLAB/Simulink:支持触发子系统(Triggered Subsystem)和Stateflow状态机建模,实现事件触发逻辑。
- PSCAD/EMTDC:适用于电力电子设备精细化仿真,如逆变器控制环设计。
- MATLAB/Simulink:支持触发子系统(Triggered Subsystem)和Stateflow状态机建模,实现事件触发逻辑。
-
典型仿真案例:
- 4机并联系统:在下垂控制基础上叠加事件触发二次控制,1s投入二次控制后,电压/频率偏差从±2%降至±0.5%。
- 多扰动测试:负载阶跃变化(如2s投入/3s切除负载)下,系统恢复时间缩短30%,且通信量减少至传统方法的1%。
五、现有模型的缺陷与改进方向
-
局限性分析:
- 功率均分不足:部分模型仅恢复电压/频率,未实现有功/无功的精确分配。
- 参数敏感性:下垂系数和触发阈值依赖经验调整,缺乏自适应能力。
- 复杂场景适应性:高比例新能源接入时,模型对谐波、不平衡负载的鲁棒性不足。
-
未来研究方向:
- 智能算法融合:引入神经网络或强化学习优化触发阈值与控制参数。
- 即插即用支持:扩展模型以适应DG的动态接入与退出。
- 多时间尺度协调:耦合一次调频与二次调压的动态时序,提升整体稳定性。
六、结论
事件触发机制与二次电压/频率协同控制的结合,为孤岛微电网提供了高可靠性、低通信开销的解决方案。通过分层控制架构、动态触发策略及先进算法优化,可有效应对新能源波动与复杂运行环境。未来需进一步探索智能算法集成与多能耦合场景下的协同控制,推动微电网向更高自主性与适应性发展。
📚2 运行结果
2.1 模型搭建


2.2 整体控制

2.3 事件触发控制

工况设置:1s时投入二次控制,2s时投入负载,3s时切离负载。
2.4 输出波形

各逆变单元输出频率:

各逆变单元输出电压:

由上仿真图可知,在没有投入二次控制前各逆变系统的输出频率与电压均有跌落,不能稳定在额定值,在投入基于事件触发机制的二次后,频率与电压均能稳定在额定值,且不受负载变动的影响。此模型只针对系统的电压与频率的恢复控制,并没有实现功率的均分,与参考文献是一致的。


🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。




















 1103
1103

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











