






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
一、6自由度欠驱动自主水下机器人(AUV)的基本概念与结构组成
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
6自由度欠驱动自主水下机器人反馈线性化仿真研究
一、6自由度欠驱动自主水下机器人(AUV)的基本概念与结构组成
-
六自由度定义
6自由度指AUV在三维空间中的运动能力,包括三个平移自由度(纵荡Surge、横荡Sway、垂荡Heave)和三个旋转自由度(横摇Roll、纵摇Pitch、转艏Yaw)。各自由度的运动特性如下:- 平动自由度:沿x(Surge)、y(Sway)、z轴(Heave)的直线运动。
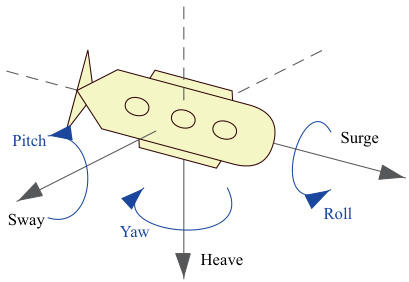
- 旋转自由度:绕x轴(Roll)、y轴(Pitch)、z轴(Yaw)的转动。
- 平动自由度:沿x(Surge)、y(Sway)、z轴(Heave)的直线运动。
-
欠驱动特性
欠驱动指控制输入数少于自由度数的系统。例如,AUV可能仅配置4个推进器(8个输出量)以实现6自由度控制,导致需通过冗余推力分配和姿态协同间接控制部分自由度。实际应用中,横滚(Roll)常通过配平抑制,仅需5自由度控制。 -
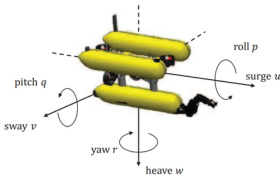
推进系统结构
- 典型推进器布局:
采用冗余推进器(如四推进器)实现6自由度控制,通过推力分配优化算法(如能耗最小化)解决无穷多解问题。例如,等腰三角形布置的导流罩可增强垂荡控制稳定性。 - 浮力调节机构:用于上浮/下潜和纵倾角控制,减少推进器能耗。
- 典型推进器布局:
二、反馈线性化方法在水下机器人控制中的应用原理
-
核心步骤
- 输入-状态线性化:
-
确定相对阶(输出对输入的导数次数);
-
构造非线性变换 z=T(x),将状态方程线性化;
-
设计反馈控制律 u=α(x)+β(x)v 。
- 输入-输出线性化:
类似步骤,但仅线性化输出动态方程。
- 输入-输出线性化:
-
优势与挑战
- 优势:将非线性系统转化为线性系统,简化控制器设计。
- 挑战:
- 依赖精确动力学模型,对参数误差敏感;
- 需保证零动态稳定性,避免内部发散。
- 改进方向
- 模糊反馈线性化:结合模糊逻辑动态调整控制器参数,提升鲁棒性。
- 自适应观测器:补偿模型误差和外部扰动(如水流),降低对模型精度的依赖。
三、动力学建模与仿真工具
- MATLAB/Simulink应用
- 动力学建模:通过Simulink搭建6自由度非线性模型,集成质量矩阵、科里奥利力、流体阻尼等参数。
- 控制算法设计:利用Control System Toolbox设计PID、滑模或强化学习控制器。
- 实时仿真:支持硬件在环(HIL)测试,生成C/C++代码直接部署至嵌入式系统。
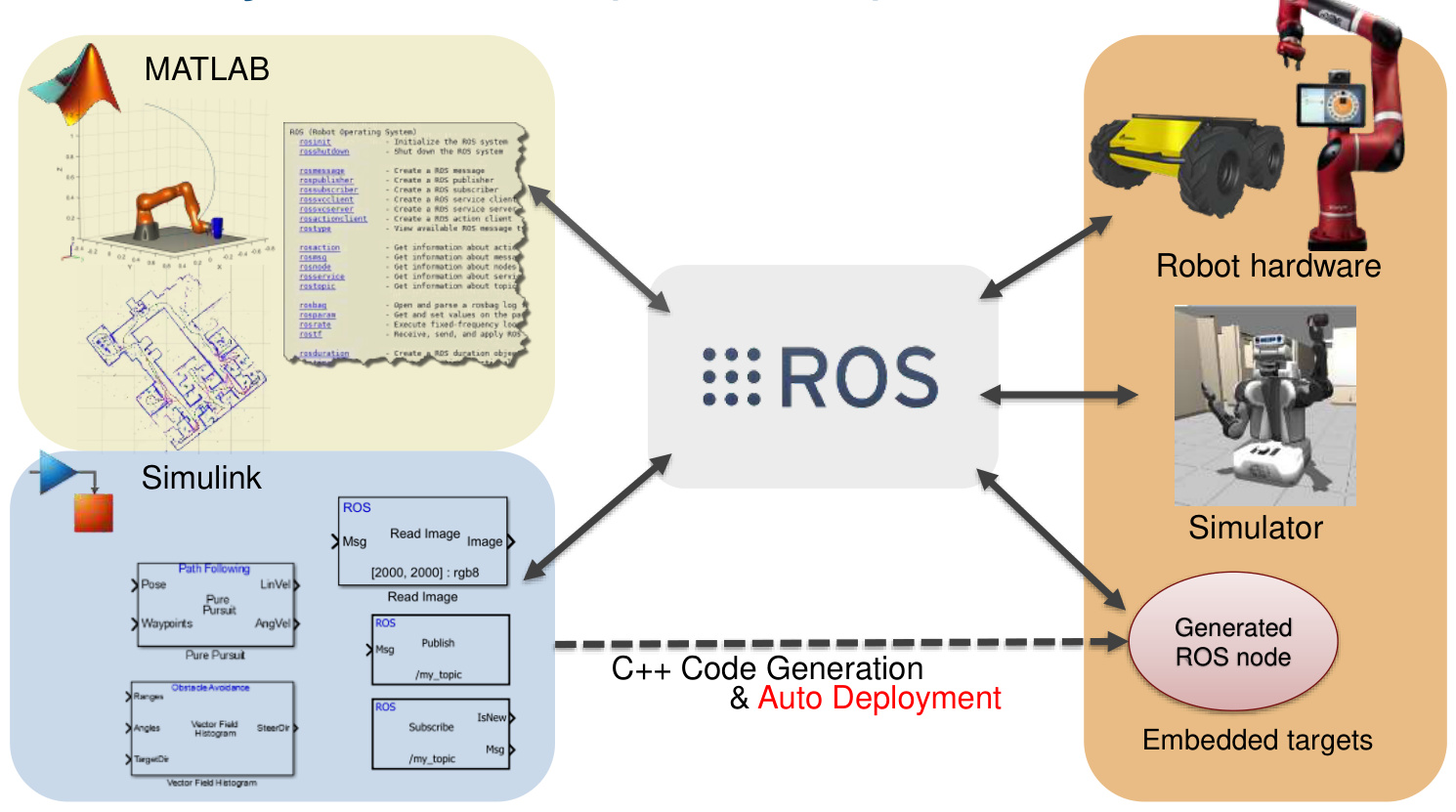
2. ROS集成
- Gazebo仿真:结合ROS Gazebo插件模拟水下环境(如水动力、推进器噪声)。
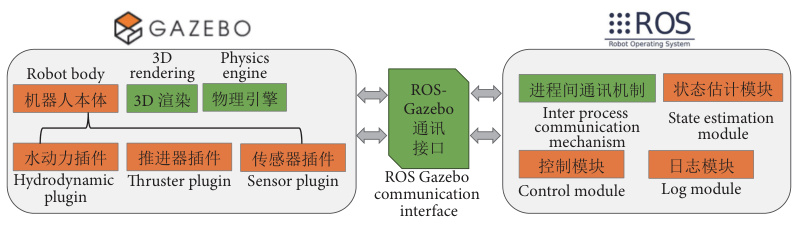
- 多工具协同:MATLAB通过ROS Toolbox订阅/发布话题,实现与Gazebo的实时数据交互。
四、现有研究案例与参数获取方法
-
典型案例
- UX-1机器人:基于反馈线性化的轨迹跟踪控制器,在10m×6m×5m水箱中验证,性能优于LQR控制器。
- USM镇定控制:模糊反馈线性化结合自适应扩张状态观测器,湖试中6维均方根误差降低至0.1–1.0量级。
-
模型参数辨识方法
- 试验法:通过水池试验获取水动力参数(如阻尼系数)。
- CFD仿真:计算流体动力学分析推进器推力与流场关系。
- Kane方程建模:避免复杂相互作用力计算,提升建模效率(如X舵AUV)。
五、反馈线性化在AUV中的实现步骤
-
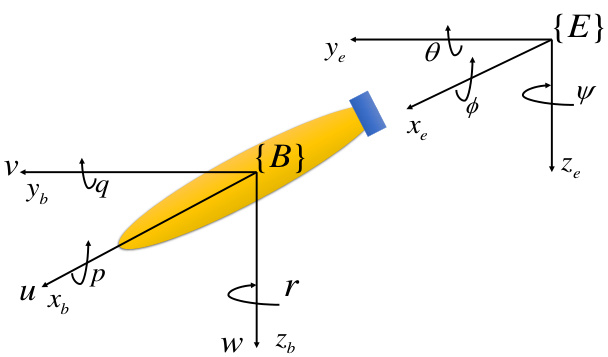
动力学模型构建
基于牛顿-欧拉方程建立6自由度非线性模型:
其中 M 为惯性矩阵,C 为科里奥利力,D 为阻尼矩阵,g 为恢复力。
-
坐标变换与解耦
通过非线性变换将模型分解为线性子系统和零动态,例如将纵荡、横荡、转艏通道解耦。 -
控制律设计
设计反馈控制律补偿非线性项,例如:
其中 v 为线性化后的虚拟控制输入。
六、典型仿真配置方案
-
MATLAB/Simulink流程
- 模型搭建:使用Simscape Multibody构建机械结构,Simulink设计控制算法。
- ROS集成:通过ROS Toolbox连接Gazebo,实现传感器数据(如IMU、声呐)的实时交互。
- 代码生成:使用Embedded Coder生成ROS节点代码,部署至NVIDIA Jetson等嵌入式平台。
-
多工具协同案例
- 路径跟踪仿真:
-
Gazebo模拟水下环境与AUV动力学;
-
MATLAB设计反馈线性化控制器;
-
ROS传递控制指令并记录轨迹数据。
七、总结与展望
反馈线性化为欠驱动AUV控制提供了系统化解耦方案,但其依赖模型精度和实时计算能力仍是挑战。未来方向包括:
- 自适应与鲁棒融合:结合L1自适应控制增强抗扰能力;
- AI增强设计:利用强化学习优化反馈线性化参数;
- 分布式架构:支持多AUV协同控制,提升任务复杂度。
通过MATLAB/Simulink与ROS的深度集成,可实现从模型验证到实际部署的全流程闭环,加速水下机器人技术的工程化应用。
📚2 运行结果
部分代码:
Vd = M\(tau -g1 -D1*V-C1*V);
Xdd = J(1:3,1:3)*Vd(1:3) + J(1:3,1:3)*S(V(4:6))*V(1:3);
Xdot(1:6) = Xd;
Xdot(7:12) = Vd;
ux1 = -0.01*1000*cos(10*t) + 100*(-0.01*100*sin(10*t) - Xdd(1)) + 100*(0.01*10*cos(10*t) - Xd(1)) + 1000*(0.01*sin(10*t) - x);
uy1 = 0 + 1*(0 - Xdd(2)) + 1*(0.01 - Xd(2)) + 1*(0.01*t - y);
uz1 = 0 + 1*(0 - Xdd(3)) + 1*(0.01 - Xd(3)) + 1*(0.01*t - z);
Rnb = J(1:3,1:3);
Rbn = inv(Rnb);
us = Rbn*[ux1;uy1;uz1];
ux = us(1);
uy = us(2);
uz = us(3);
% u = 0;
% v = 0;
% w = 0;
% p = 0;
% q = 0;
% r = 0;
% theta = 0;
% phi = 0;
% ux = 0;
% uy = 0;
% uz = 0;
Xdot(13) = fd1(f1,f2,f3,p,phi,q,r,theta,u,ux,uy,uz,v,w);
Xdot(14) = fd2(f1,f2,f3,p,phi,q,r,theta,u,ux,uy,uz,v,w);
Xdot(15) = fd3(f1,f2,f3,p,phi,q,r,theta,u,ux,uy,uz,v,w);
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]张利军,齐雪,赵杰梅,等.垂直面欠驱动自治水下机器人定深问题的自适应输出反馈控制[J].控制理论与应用, 2012, 29(10):6.
[2]陈天明.基于事件触发的欠驱动水下机器人轨迹跟踪控制研究[D].燕山大学,2023.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取




















 931
931

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











