






在adams中d的含义,带d代表转动量,不带d代表位移量。
STEP 函数为运动副添加驱动
STEP(x,x0,h0,x1,h1)
x:自变量,可以是时间或时间的任一函数
x0 :自变量的STEP函数开始值,可以是常数、函数表达式或设计变量;
x1 :自变量的STEP函数结束值,可以是常数、函数表达式或设计变量;
h0 : STEP函数的初始值,可以是常数、设计变量或其它函数表达式;
h1 : STEP函数的最终值,可以是常数、设计变量或其它函数表达式。
e.g.
1.旋转副驱动(角位移):
STEP(time,1,0d,2,20d)+STEP(time,6,0d,12,-40d)意义: 1秒到2秒:角度从从0递增至20; 2秒到6秒:保持电机输出数值为20不变; 6秒到12秒:由20递减40,结果为-20。
2.移动副(线位移)
STEP(time,1,0,2,20)+STEP(time,6,0,12,-40)意义: 1秒到2秒:位置从0递增至20; 2秒到6秒:保持电机输出数值为20不变; 6秒到12秒:由20递减40,结果为-20。
此处的单位为adams中开始设定的单位。
3.周期运动
STEP(MOD(time,12)0,0,2,20)+STEP(time,6,0,12,-20)意义: 0秒到2秒:位置从0递增至20; 2秒到6秒:保持电机输出数值为20不变; 6秒到12秒:由20递减20,结果为0。由此可知,这是一个周期为12的,梯形变化曲线。
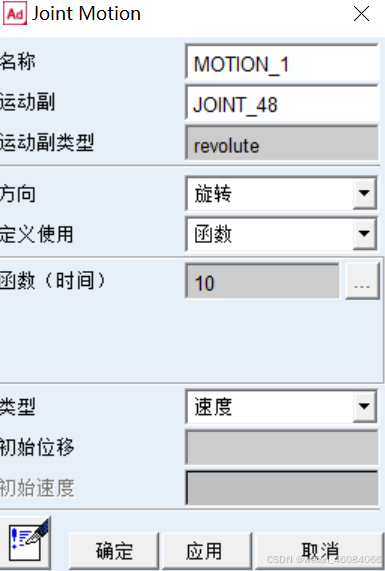
4.恒转速运动
直接在adams中设置一个具体数值即可,例如10r/min,此处设置10即可。
5.设置非周期性的运动,可以联合MATLAB进行设置,因为非周期的运动无法用一个确定的表达式进行表达,因此,建议将机电耦合的速度响应结构联立到adams中;
6.三角函数式驱动
可直接在adams中书写
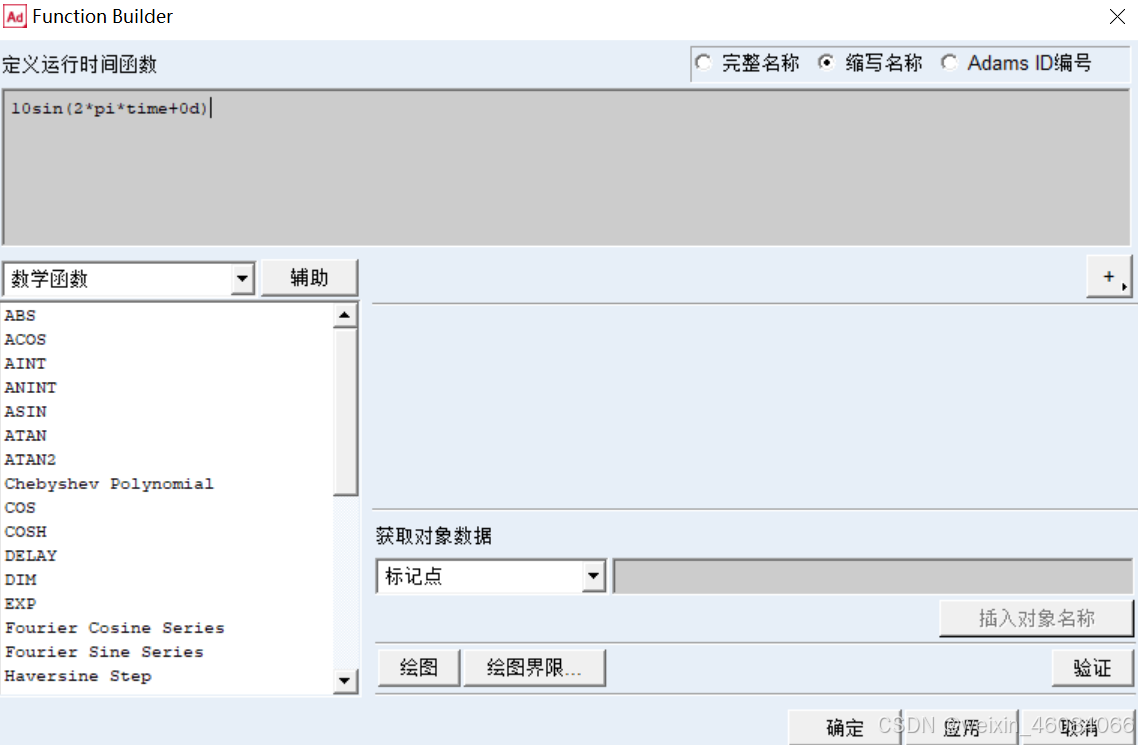
例如,上面的意义为,频率为1Hz,初始相位为0,幅值为10的正弦函数变化规律的运动。因10后面没有加d,代表的是位移量,若是求角度量,则在10后面添加d。
7.其他曲线型,类似三角函数型进行编写即可。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









