%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 均匀面阵方向图的三种不同的表达式
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clc;
close all;
clear all;%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 参数设置
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% theta是俯仰角 fine是方位角
c=3e8;% 光速
f=3e10;% 载波频率
lamda=c/f;% 波长
d=lamda/2;% 阵元间距
M=8;
N=8;%8*8的矩阵
% 波束指向角度(theta0,fine0)
theta0=30;
fine0=200;
bujing=0.5;
theta=0:bujing:90;% 俯仰角取值范围
fine=0:bujing:360;% 方位角取值范围
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 第1种表达式
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%-----------权值
W =[];for m=1:M
for n=1:N
x =(m-1)*sind(theta0)*cosd(fine0)+(n-1)*sind(theta0)*sind(fine0);% 波程差
W(m,n)=exp(1j*2*pi*f*d*x/c);
end
end
W1=reshape(W,[],1);% 将8*8的矩阵变成64*1的向量
%---------方向矢量计算
E=[];for p =1:length(theta)for q =1:length(fine)for m=1:M
for n=1:N
%-------权值扫描
x =(m-1)*d*sind(theta(p))*cosd(fine(q))+(n-1)*d*sind(theta(p))*sind(fine(q));V(m,n)=exp(1j*2*pi*f*x/c);% 方向矢量的求解
end
end
V1=reshape(V,[],1);% 将8*8的矩阵变成64*1的向量
E1(p,q)=W1'*V1;% 相控阵天线的方向图
Beam_F1(p,q)=abs(E1(p,q));
end
end
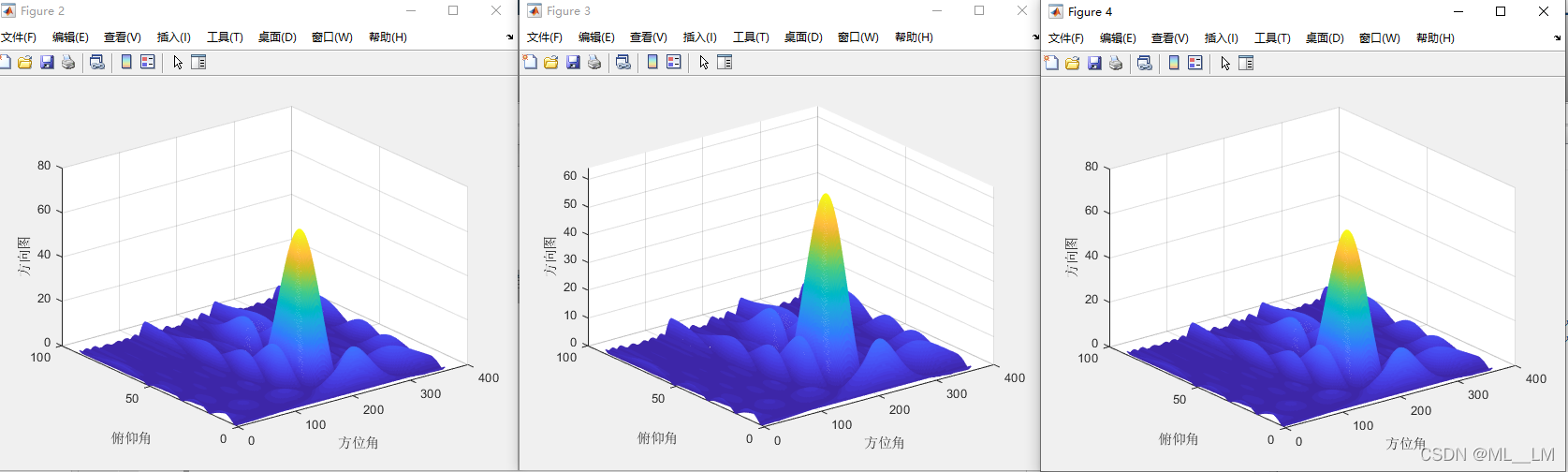
figure(4)mesh(fine,theta,Beam_F1);xlabel('方位角');ylabel('俯仰角');zlabel('方向图');%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 第二种表达式
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%for p=1:length(theta)% 俯仰角取值范围
for q=1:length(fine)% 方位角取值范围
%64个阵元功率叠加
for m=1:M
for n=1:N
r(m,n)=exp(1i*2*pi/lamda*((m-1)*d*(sind(theta(p))*cosd(fine(q))-sind(theta0)*cosd(fine0))...+(n-1)*d*(sind(theta(p))*sind(fine(q))-sind(theta0)*sind(fine0))));
end
end
E(p,q)=sum(sum(r));% 将64个阵元的合成场强放到对应的扫描角度上
end
end
Beam_F2=abs(E);% 取实部
figure(2)mesh(fine,theta,Beam_F2); hold on;xlabel('方位角');ylabel('俯仰角');zlabel('方向图');%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 第三种表达式
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%for p=1:length(theta)% 俯仰角取值范围
for n=1:length(fine)% 方位角取值范围
t1=2*pi/lamda*d*(sind(theta(p))*cosd(fine(n))-sind(theta0)*cosd(fine0));beam1(p,n)=sin(M/2*t1)/sin(1/2*t1);
t2=2*pi/lamda*d*(sind(theta(p))*sind(fine(n))-sind(theta0)*sind(fine0));beam2(p,n)=sin(N/2*t2)/sin(1/2*t2);f3(p,n)=beam1(p,n)*beam2(p,n);
end
end
Beam_F3=abs(f3);% 取实部
figure(3)mesh(fine,theta,Beam_F3);xlabel('方位角');ylabel('俯仰角');zlabel('方向图');max(max(Beam_F1-Beam_F2))max(max(Beam_F1-Beam_F3))max(max(Beam_F2-Beam_F3))

























 1112
1112

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









