






导航任务中,navigation框架下有一些很重要的节点
1、move_base节点:
发布/cmd_vel话题
2、gazebo节点:
发布/odom、/scan话题
一些特殊的经验分享:
1、gazebo订阅/cmd_vel话题,如何修改,让它订阅别的话题
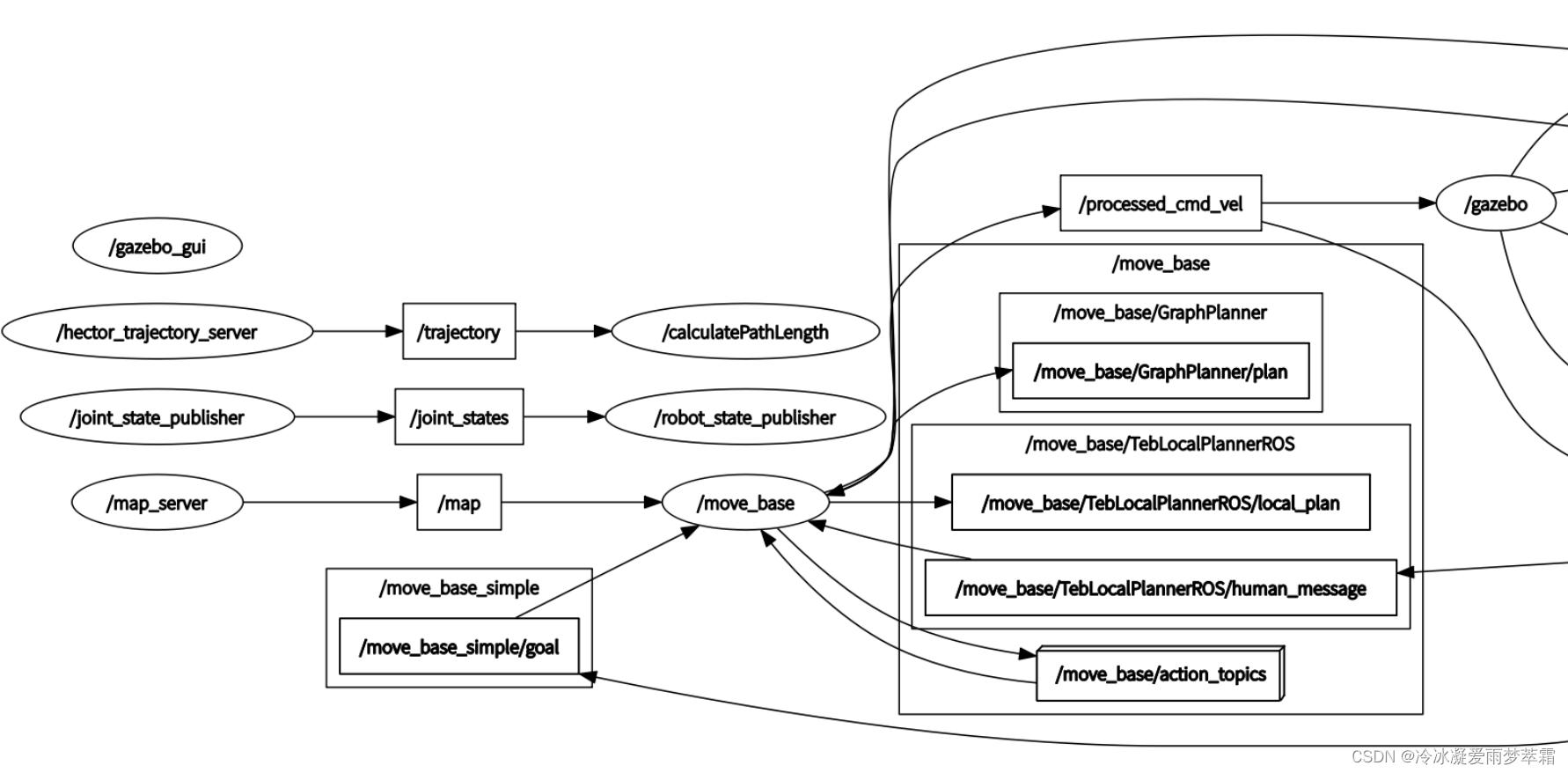
在机器人的urdf里面修改了gazebo中的<controller>commandtopic这个参数,从cmd_vel变为processed_cmd_vel。
2、如何修改move_base节点,让它发布的话题从/cmd_vel变为/processed_cmd_vel
move_base.launch 文件修改remap。
之前因为一些原因,修改了/gazebo节点订阅的/cmd_vel话题。
从下面的rqt_graph图可以看到是成功了。















 1351
1351

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









