



 博客围绕CAN模块展开,介绍了Busoff事件处理,可通过中断或轮询调用指示函数;还涉及CAN时钟模块设置、波特率设置、控制器使能等配置内容,以及数据接收和发送的处理方式,包括中断或轮询等。
博客围绕CAN模块展开,介绍了Busoff事件处理,可通过中断或轮询调用指示函数;还涉及CAN时钟模块设置、波特率设置、控制器使能等配置内容,以及数据接收和发送的处理方式,包括中断或轮询等。
1、 busoff processing:
用于处理Busoff 事件,选择中断或者轮询的方式调用指示函数,通知上层发生了Busoff事件
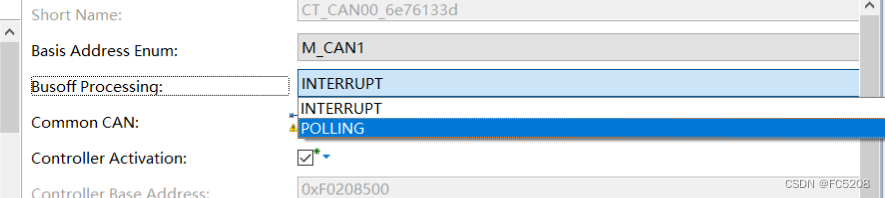
中断和 轮询
2、Clock Frequency[MHZ]
用来设置CAN的时钟模块设置了CPU时钟可以不填写

3、Common can
作用:让两个物理Node合并成一下逻辑关系从而在这个逻辑通道上,从而在这个逻辑通道上使用更多的FULL CAN ,英飞凌芯片不适合
小疑问 这个MO指的是什么? 还有就是他这么能让两个节点进行逻辑上的一个合并
4、controller Actiration:是否使能该控制器
![]()
5、controller Default Baudrate:设置波特率
![]()
6、CPU Clock Processing:应用CAN模块的时钟,此模块在MCU重进行配置
![]()
7、Interrupt priority:CAN模块的中断优先级,发送和接收都是用一个中断优先级
![]()
8、Number of can OBJ:使用的CAN OBJ个数
9、Physical Node:CAN节点
10、Receive Input selection:接收引脚的选择
![]()
11、RX Processing:接收数据的处理方式,中断或轮询

12、TX Processing:发送数据的处理方式,中断或轮询

13、Type of serivce control:中断由哪个CPU来处理


















 225
225

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









