




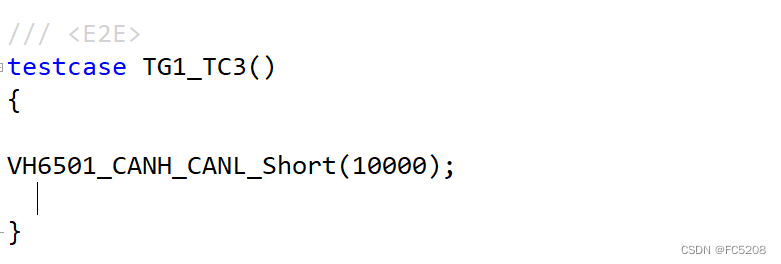
一.代码
void VH6501_CANH_CANL_Short(int time)//CANH_CANL互短
{
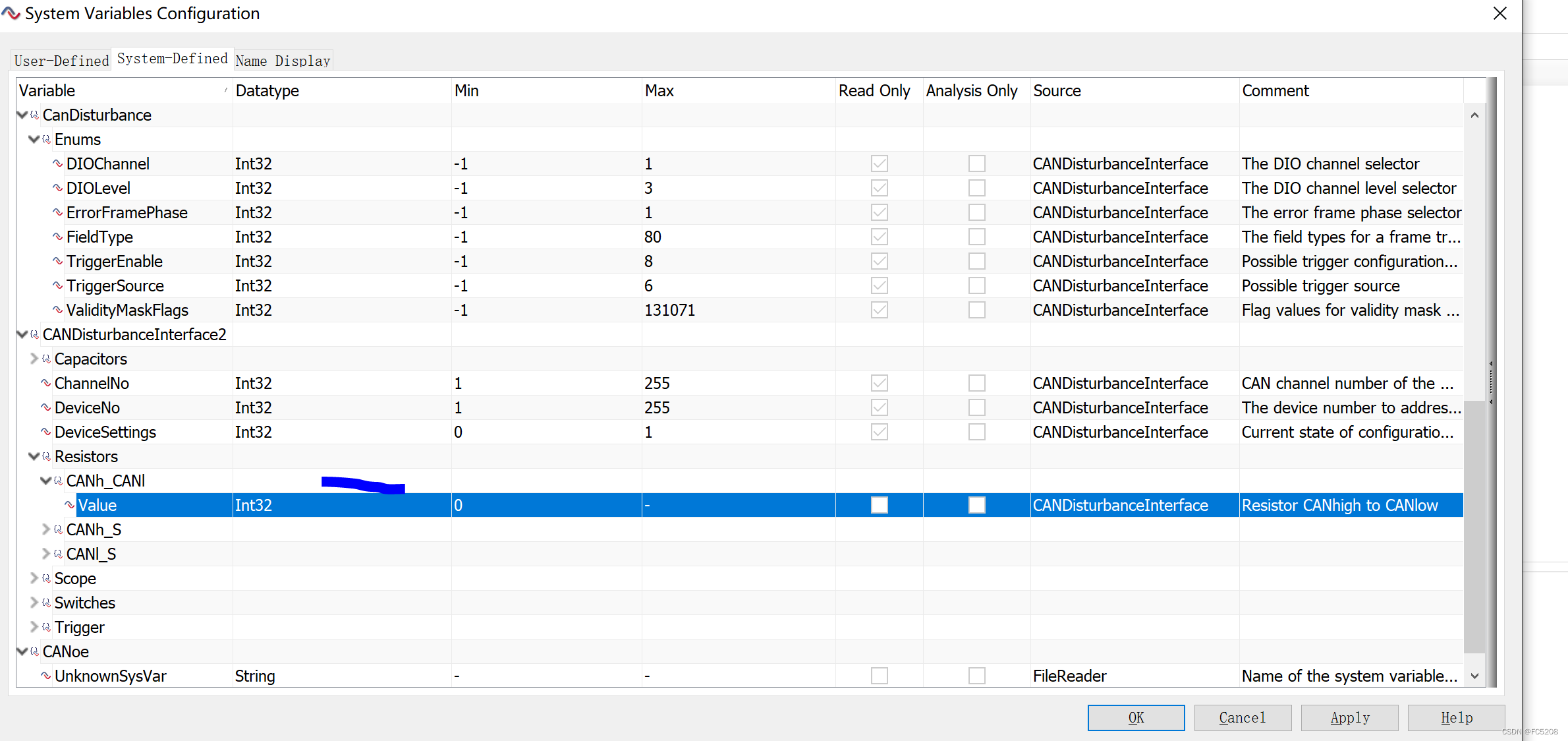
@CANDisturbanceInterface2::Resistors::CANh_CANl::Value = 0;
delay_1ms(time);
@CANDisturbanceInterface2::Resistors::CANh_CANl::Value = 0x7FFFFFFF;
resetCan();
}
二.系统变量定义
10S
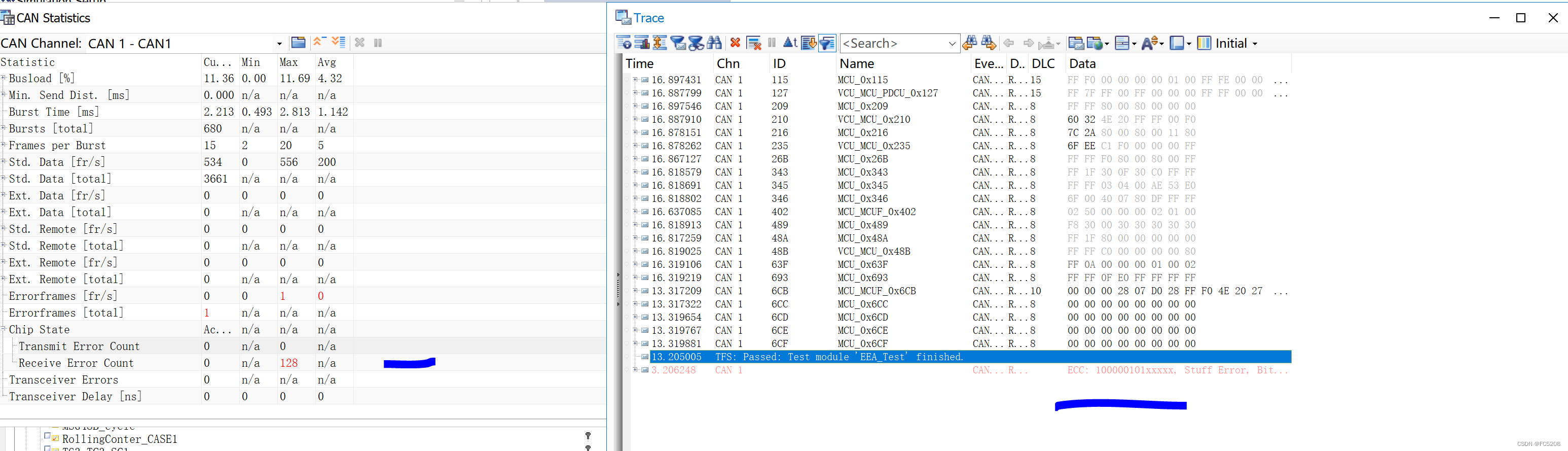
三.实验 结果: 通过OK
二. BUSOFF 快恢复以及慢回复 快恢复50 ms 满恢复200ms
1.前提条件
励志:
这辈子你可以回头看,但别往回走了,因为逆行全责。
有一起学习的么?


















 6826
6826

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









