







感谢b站up 机器人工匠阿杰
文章仅供个人学习使用
官方消息包
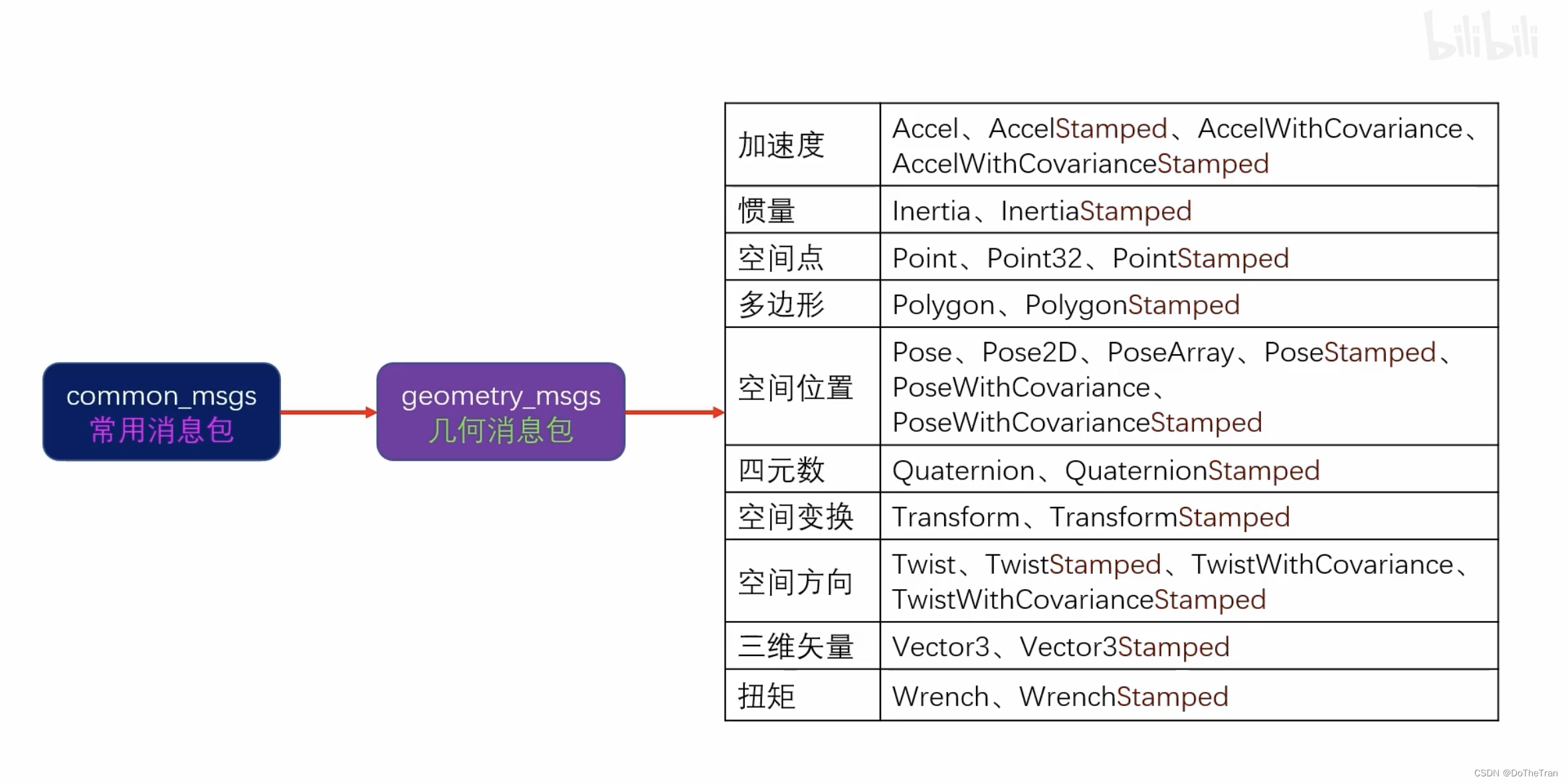
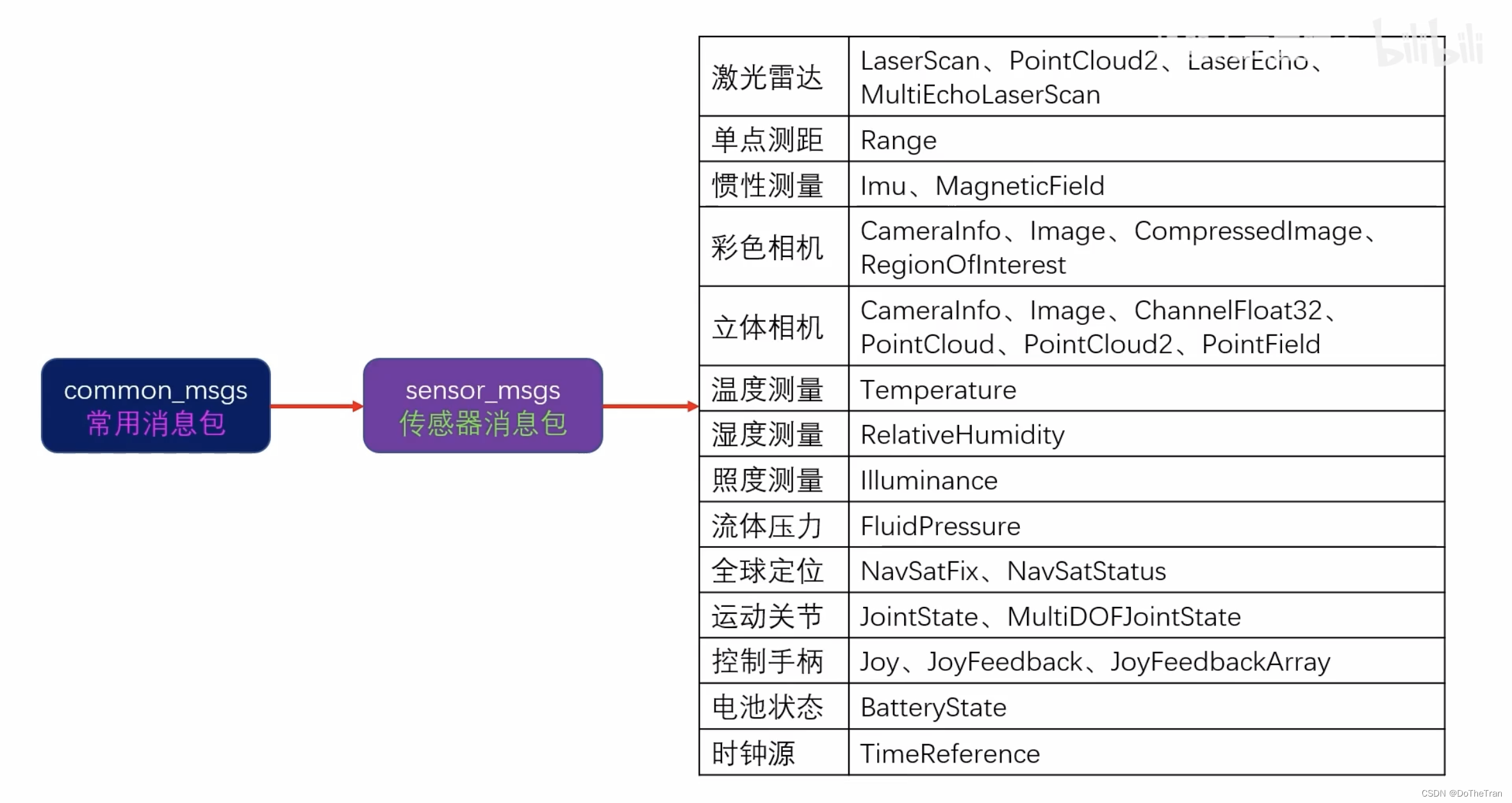
common_msgs
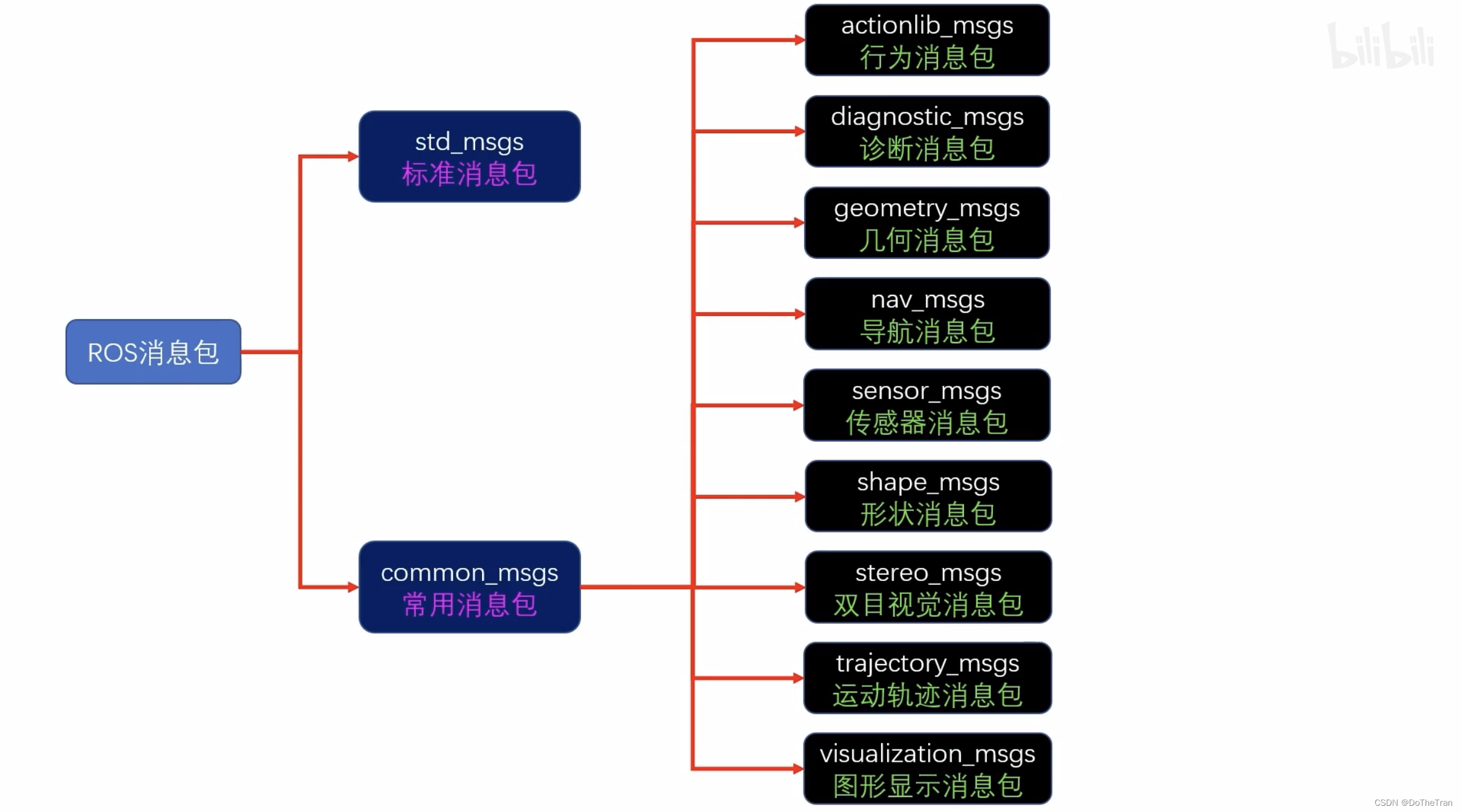
geometry_msgs
sensor_msgs
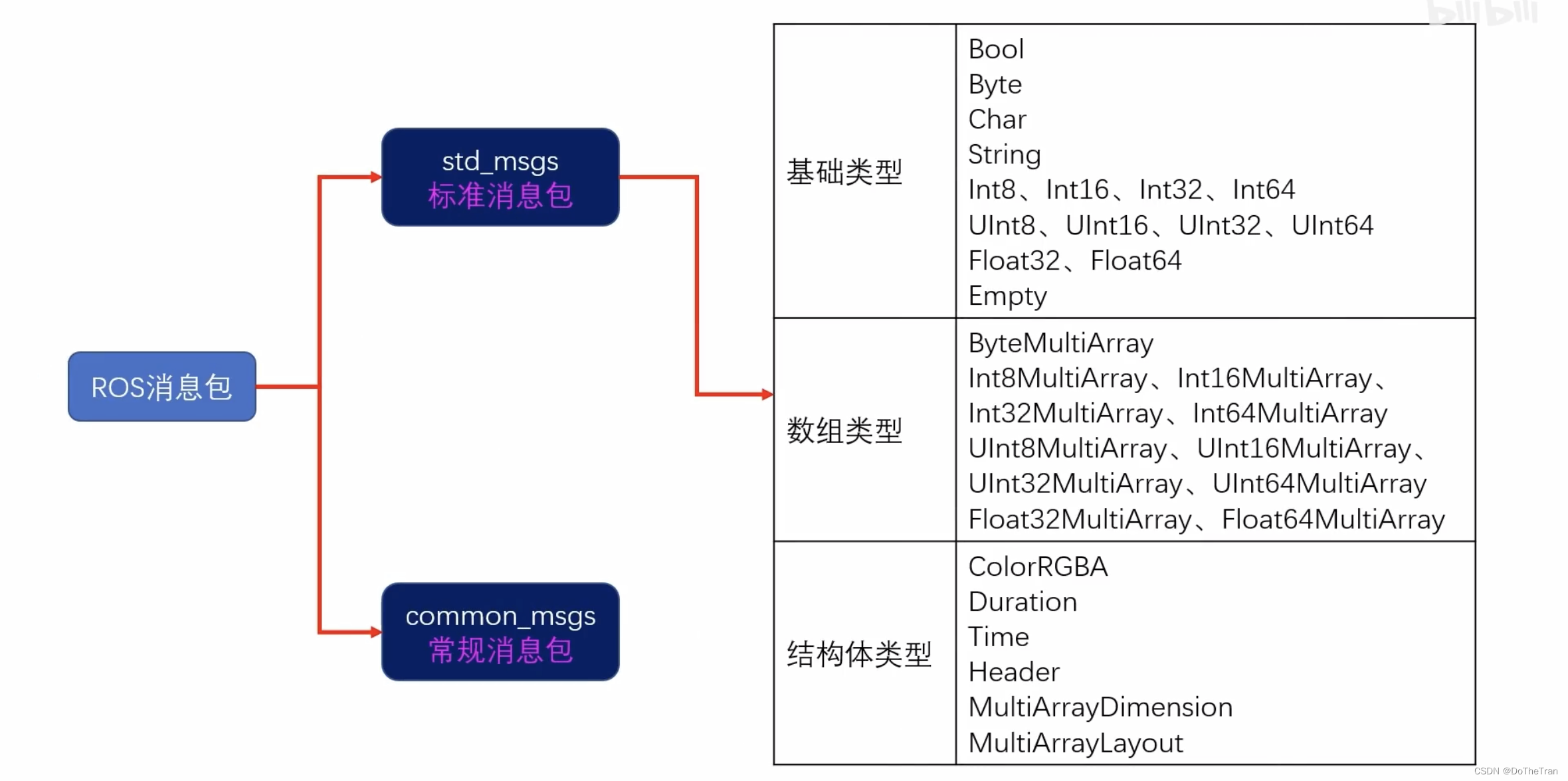
std_msgs
自定义消息包
消息包格式
数据类型 变量名
新建消息包
例:
消息包:my_msgs
消息类型:Some
定义消息包my_msgs 依赖项新增加了message_generation 和 message_runtime
cd ~/catkin_ws/src
catkin_create_pkg my_msgs roscpp std_msgs message_generation message_runtime
消息包的文件夹中,新建msg目录,在其中新建消息类型文件 Some.msg
string name
int data
string test
设置编译规则
在CMakeList中:
找到以下内容,取消注释,将 Message1.msg 替换为Some.msg ,添加消息文件(52行)
add_message_files(
FILES
My.msg
)
找到以下内容,添加新消息类型依赖的其他消息包列表(72行)
generate_messages(
DEPENDENCIES
std_msgs
)
找到catkin_package项,取消CATKIN_DEPENDS 这一行注释(109行),确保message_runtime在其中,让依赖新消息包的其他软件包能够在运行时使用新定义的消息类型
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES imu_pkg
CATKIN_DEPENDS message_generation message_runtime roscpp....
# DEPENDS system_lib
)
保存
在package.xml中
找到依赖项列表(51行)
确保 < build_depend>和< exec_depend>,都列出了message_generation 和message_runtime,缺失就补全:
......
<build_depend>message_generation</build_depend>
<build_depend>message_runtime</build_depend>
......
<exec_depend>message_generation</exec_depend>
<exec_depend>message_runtime</exec_depend>
保存,编译
查看消息包
rosmsg show my_msgs/Some #消息包/消息类型
应用消息类型
编写cpp
添加头文件
#include <my_msgs/Some.h>
将话题中的消息类型设置为新的消息
my_msgs::Some msg;
msg.name = "abc"
msg.data = 123;
msg.test = "@#$";
.......
编译
打开CMakeList
添加依赖项:将 my_msgs 添加到 find_package:
find_package(catkin REQUIRED COMPONENTS
roscpp
sensor_msgs
my_msgs
)
在节点编译规则的末尾,添加以下内容,为节点的编译添加依赖项:
add_dependencies(sensor_node my_msgs_generate_messages_cpp)
打开包的package.xml
将my_msgs添加到build_depend和exec_depend中:
......
<build_depend>message_generation</build_depend>
......
<exec_depend>message_runtime</exec_depend>
运行catkin_make重新编译















 855
855











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









