










一、单个无人机路径规划模型介绍
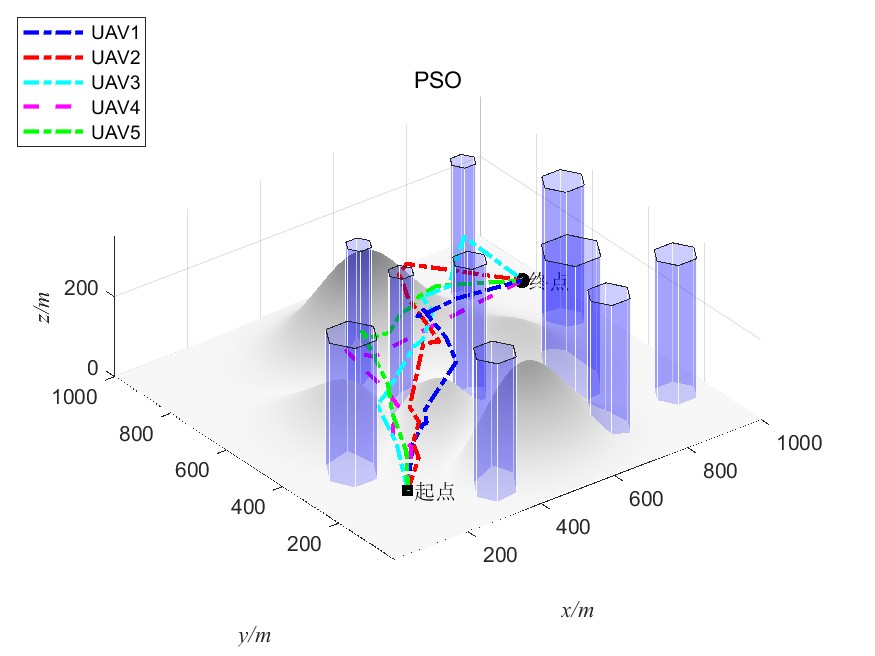
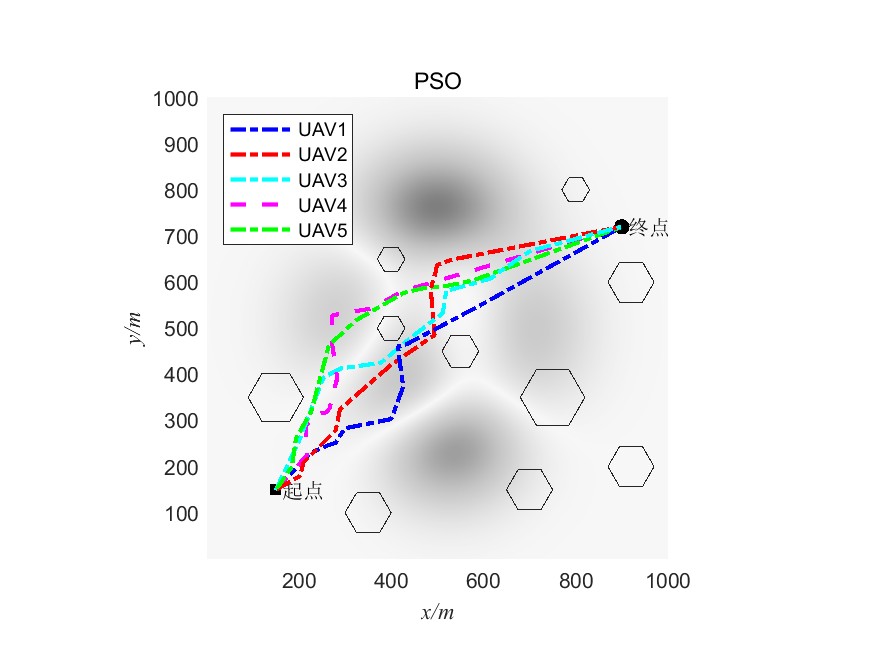
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行时间和节省能量消耗。

二、无人机集群模型介绍
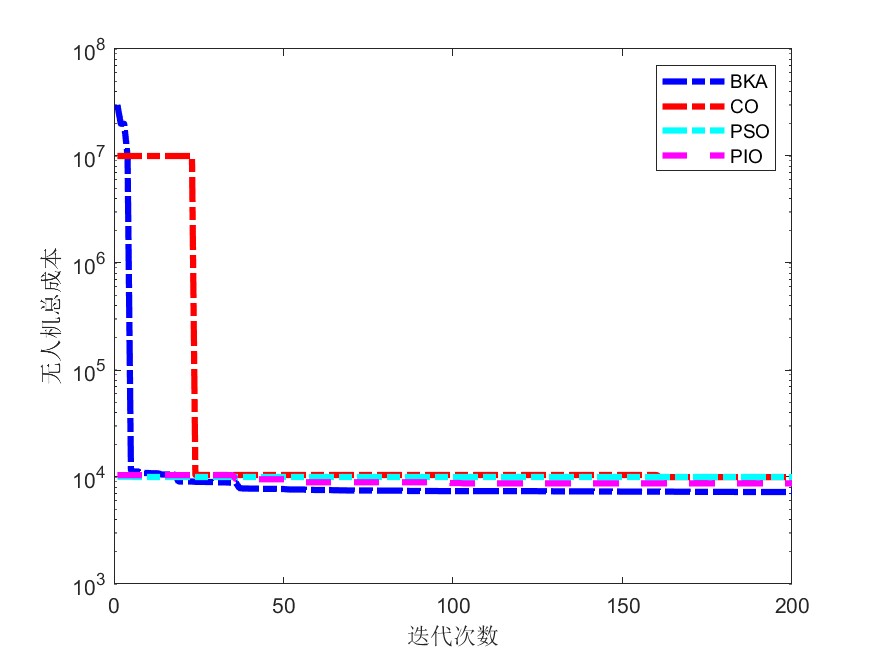
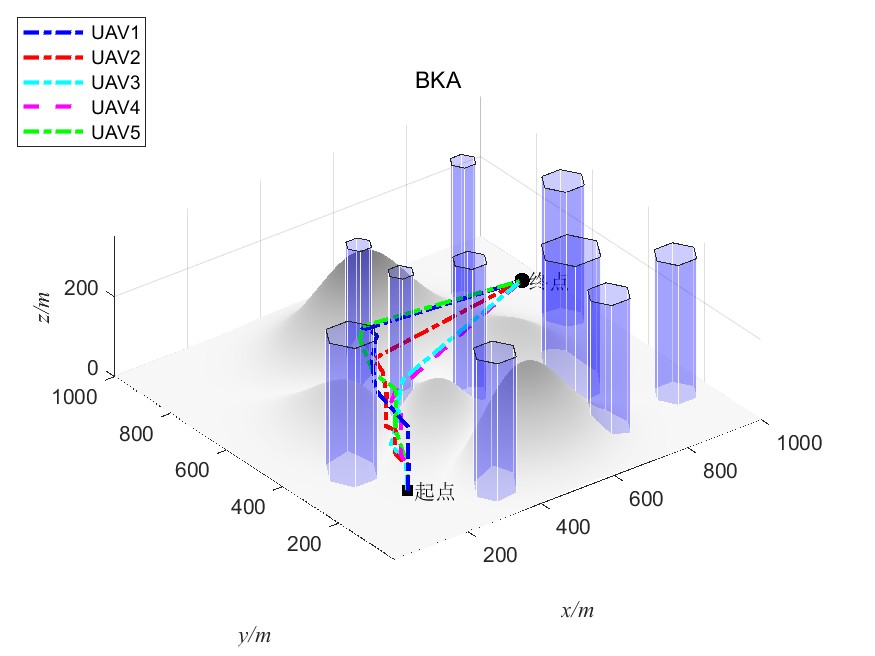
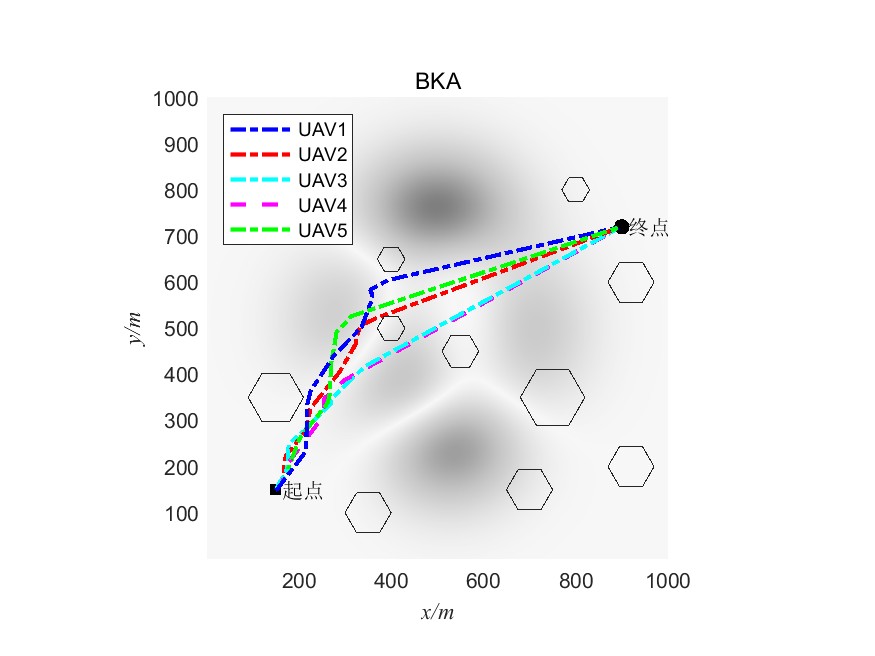
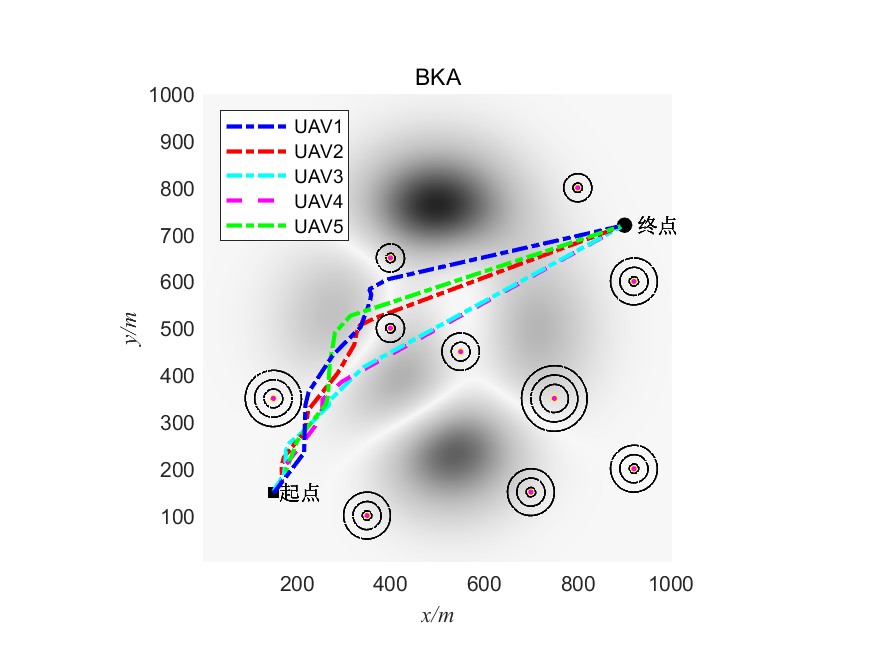
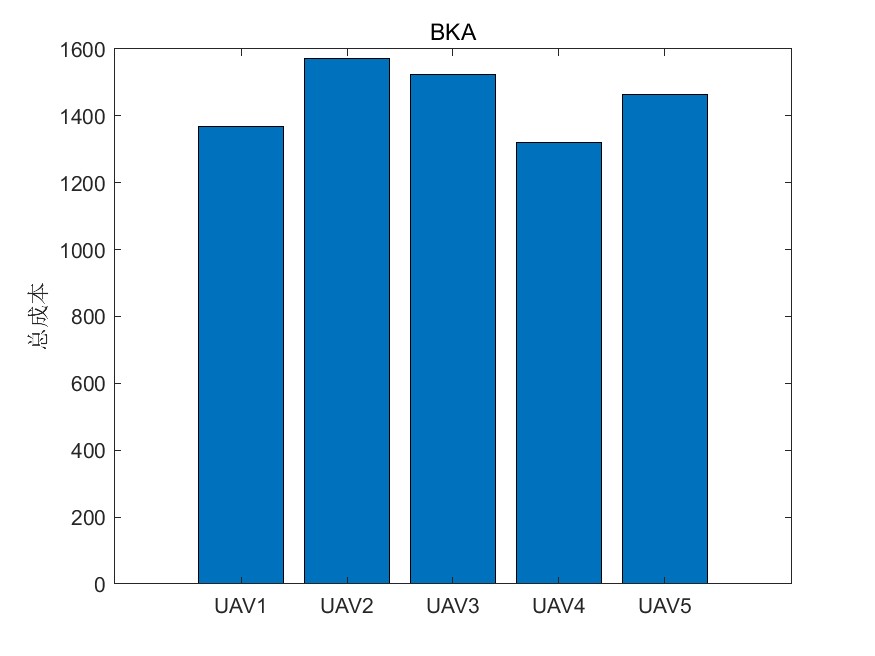
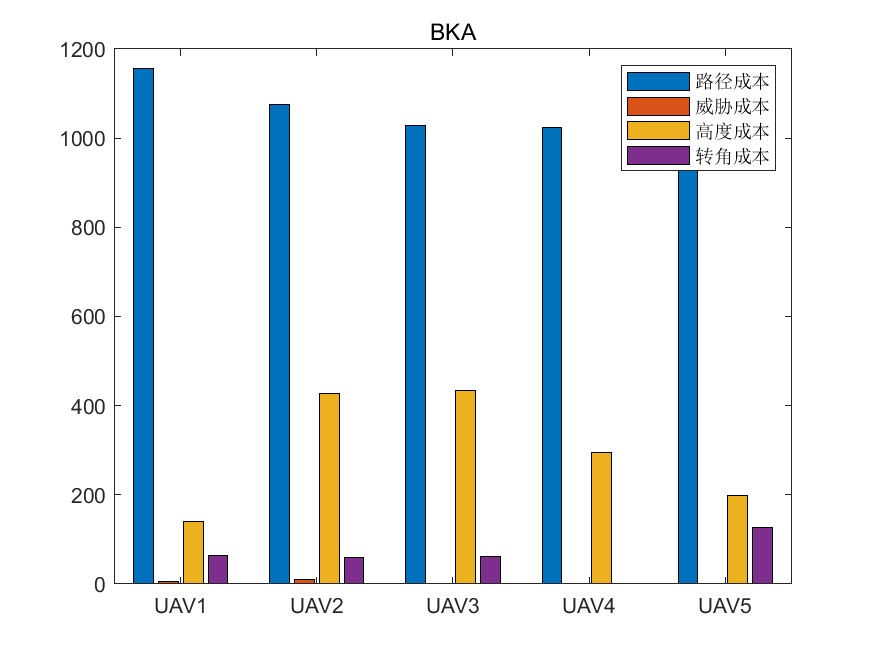
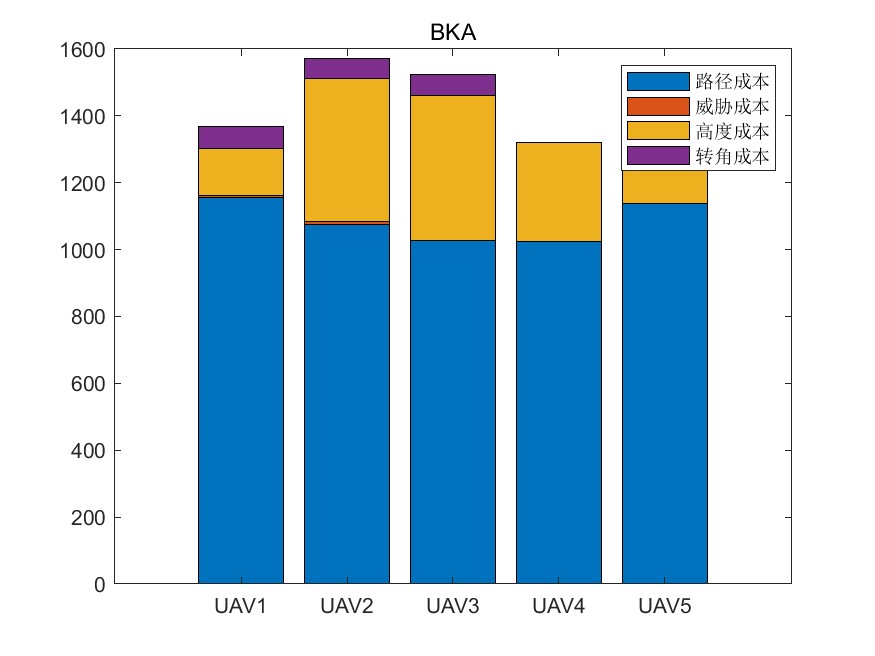
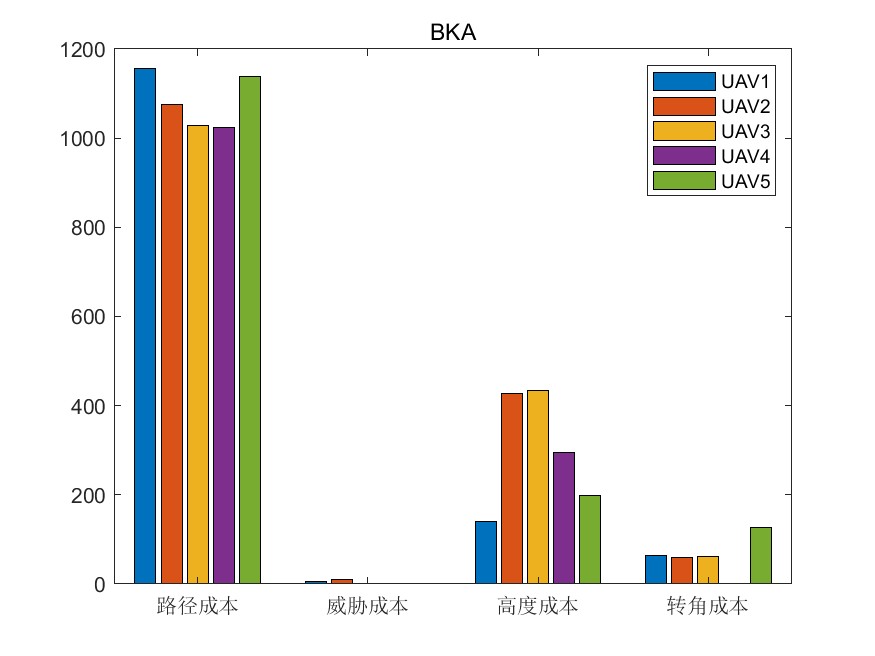
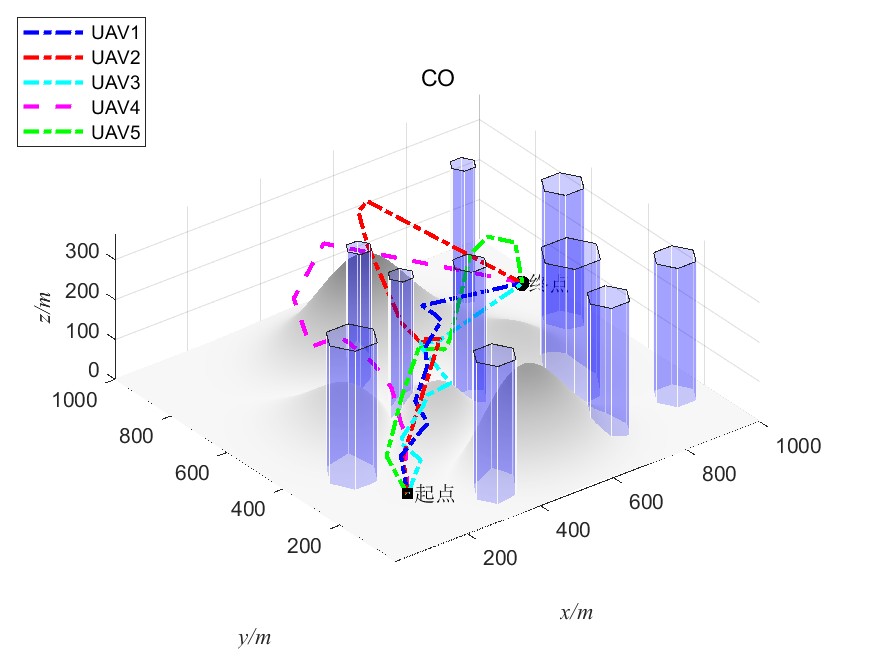
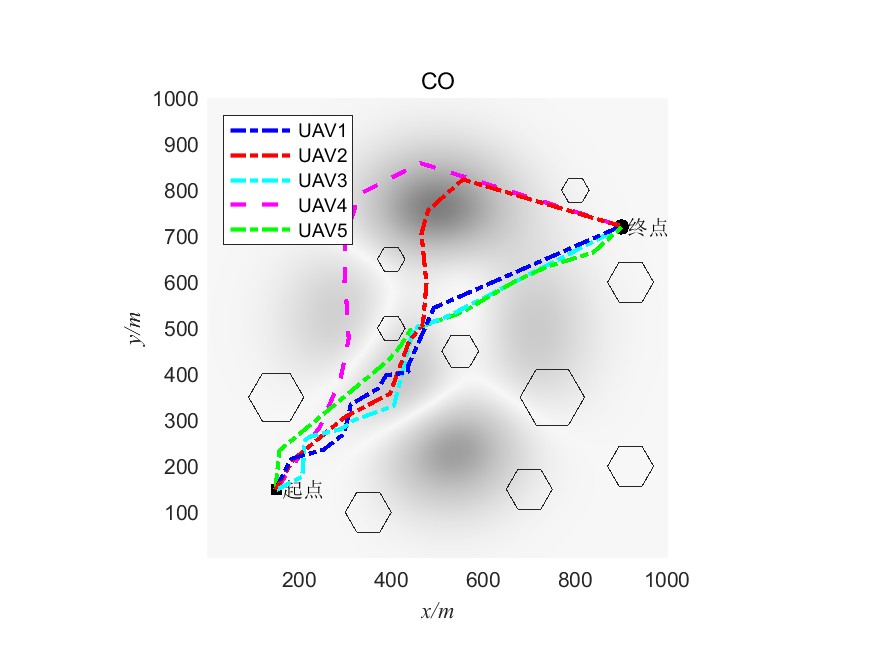
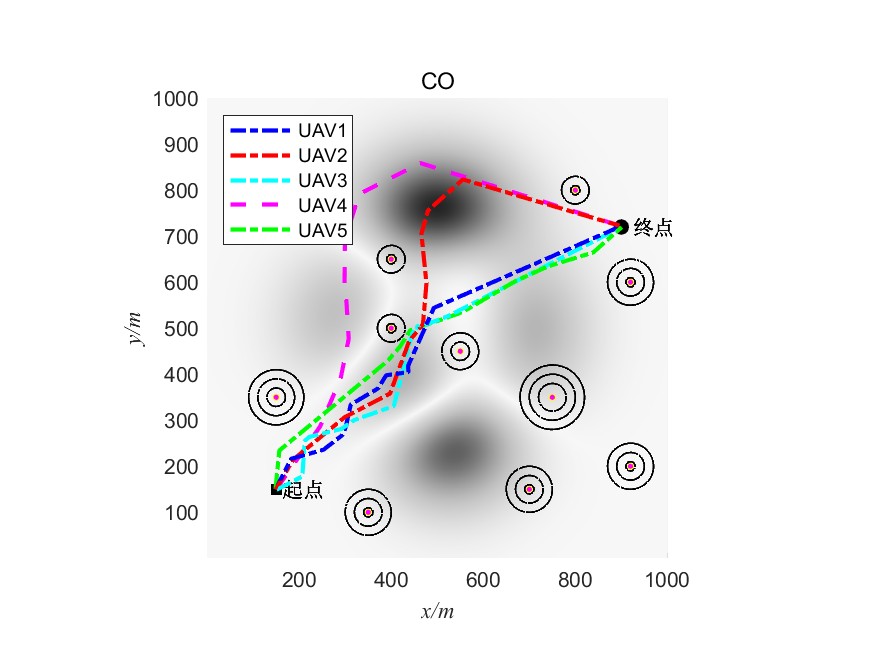
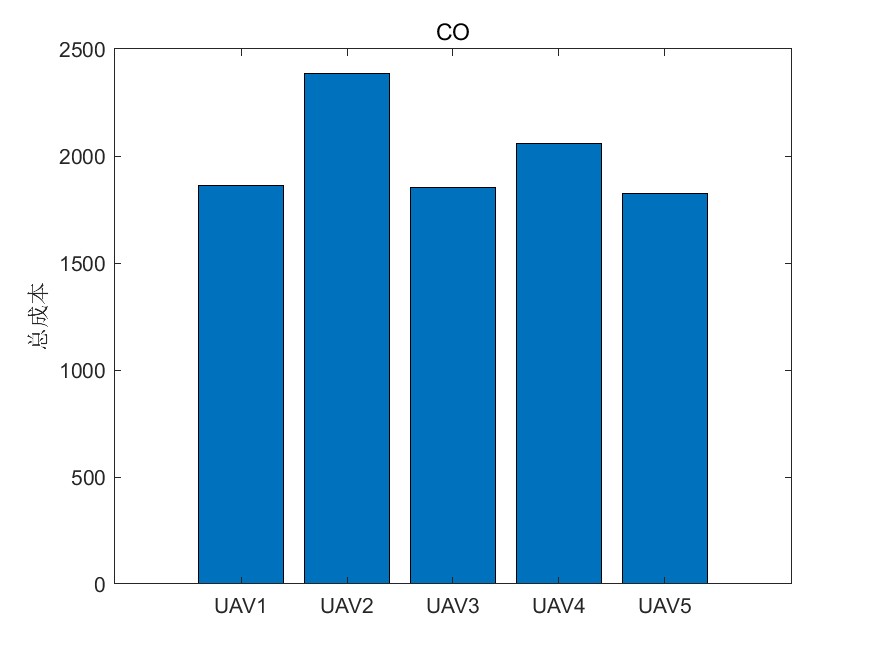
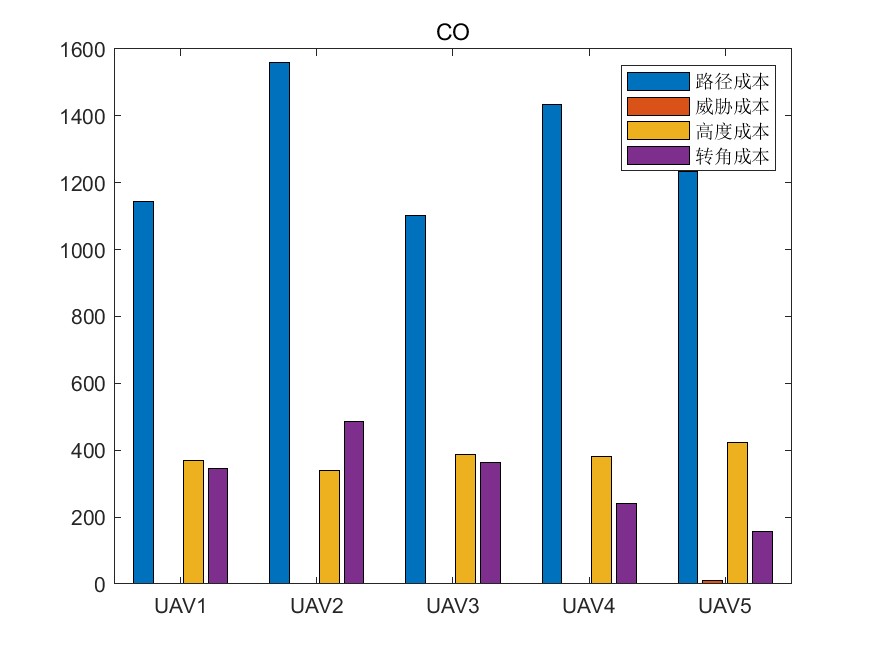
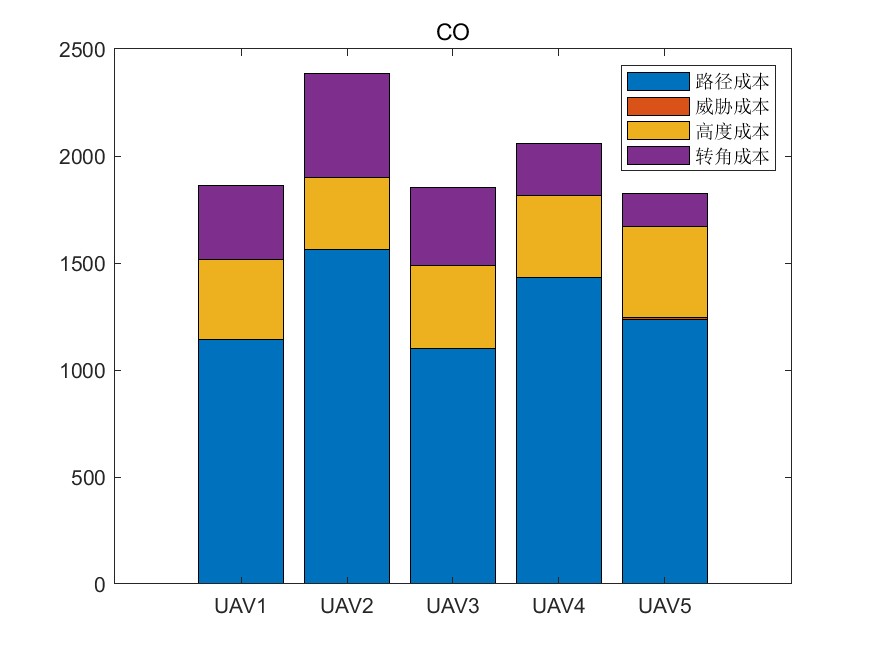
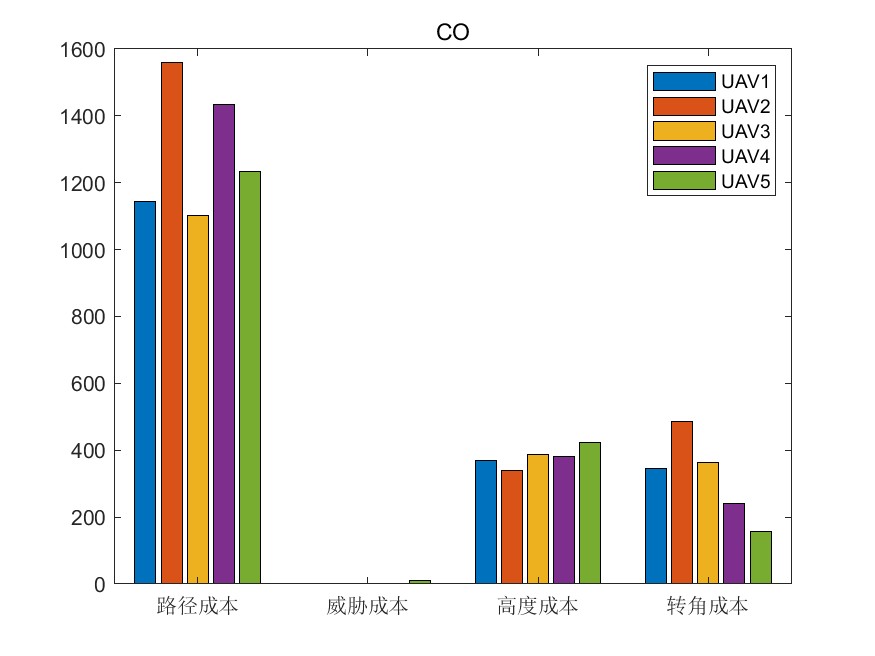
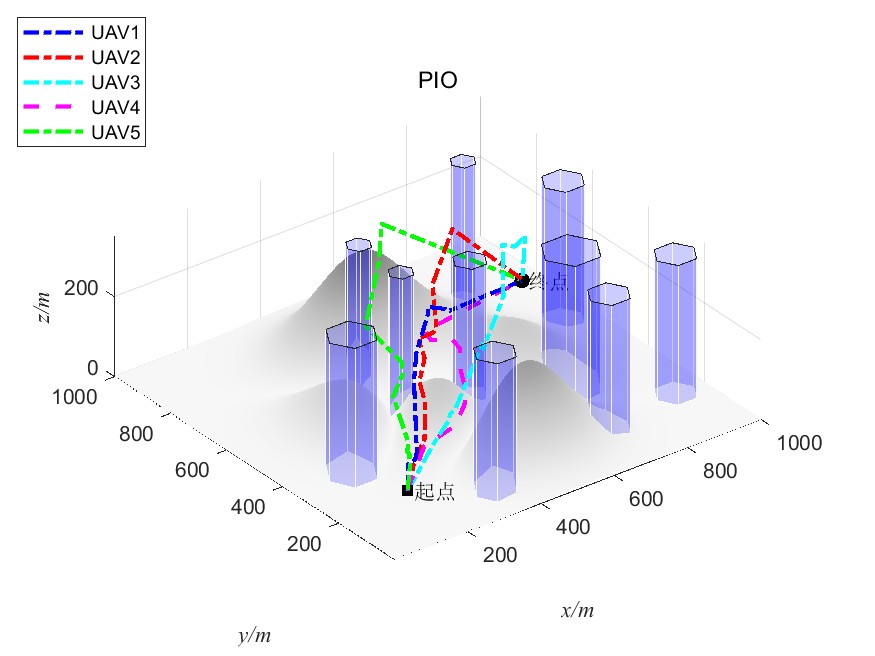
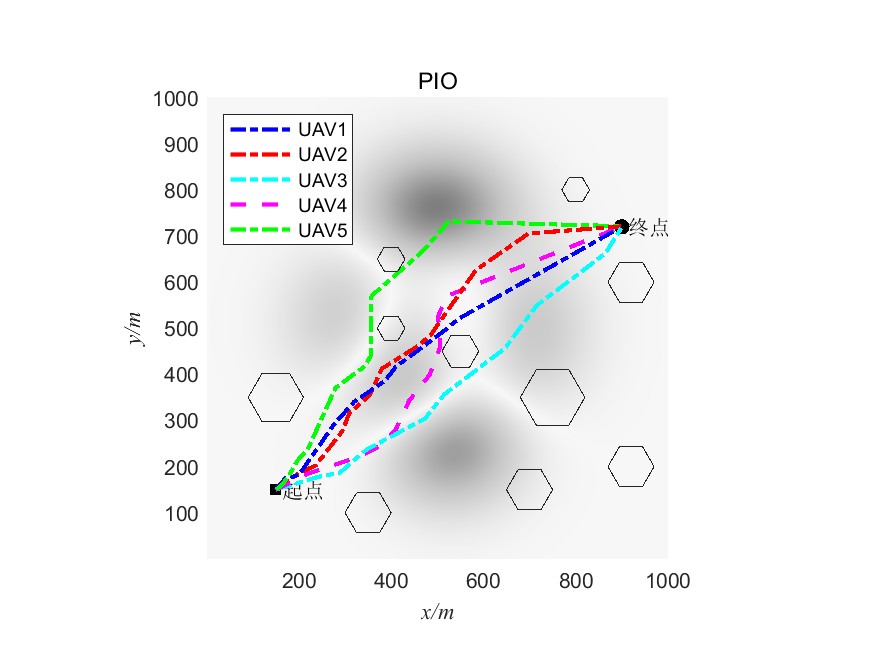
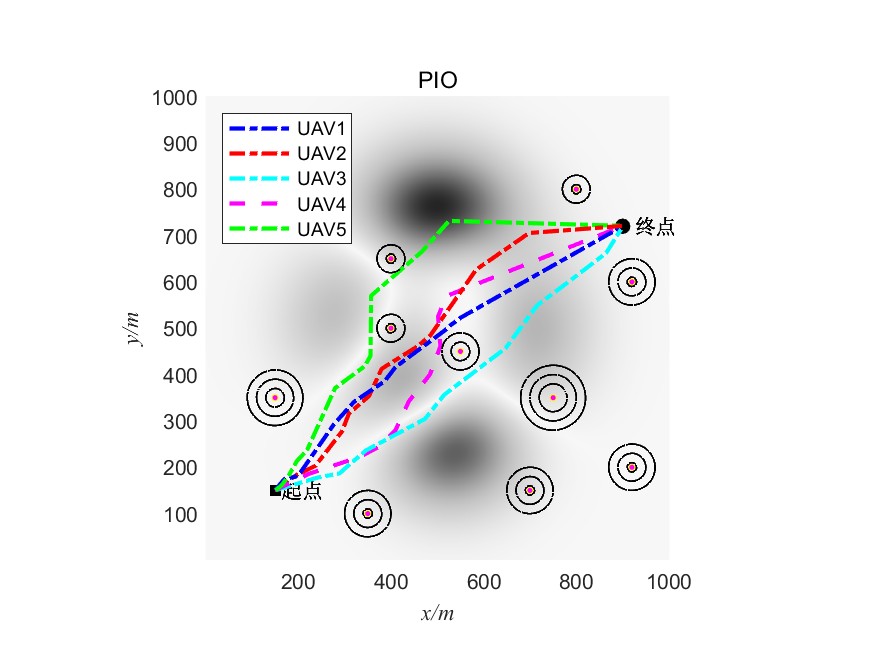
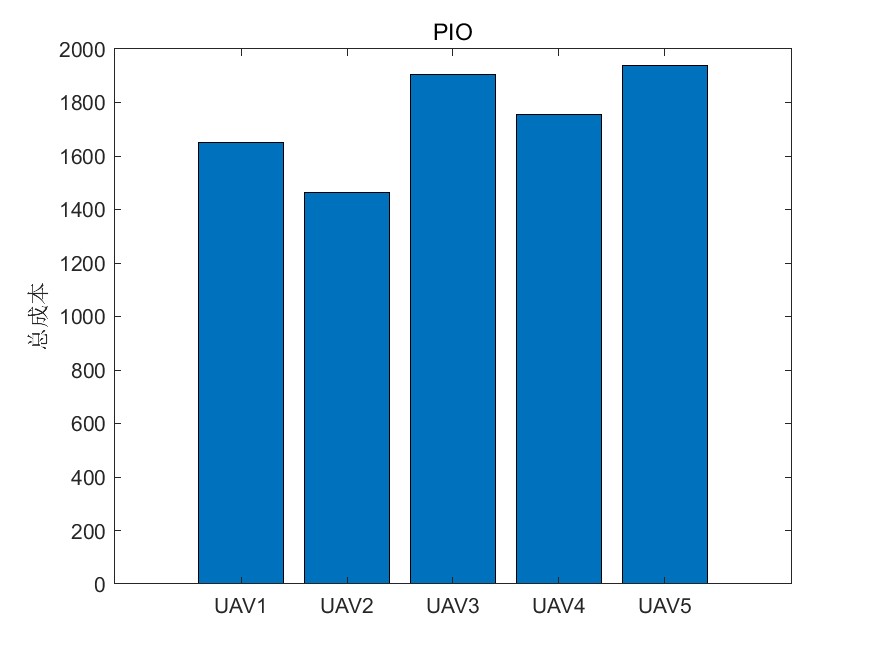
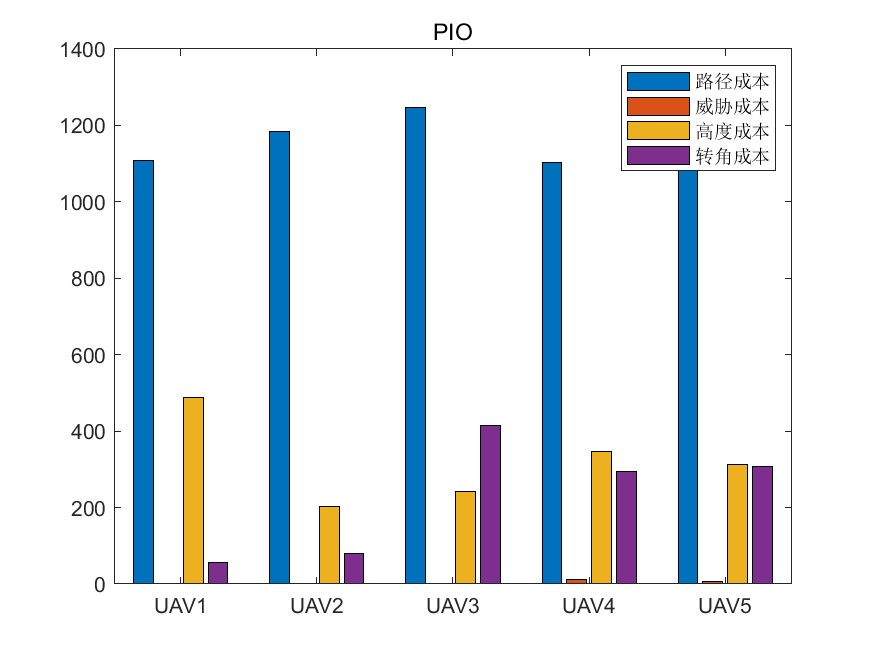
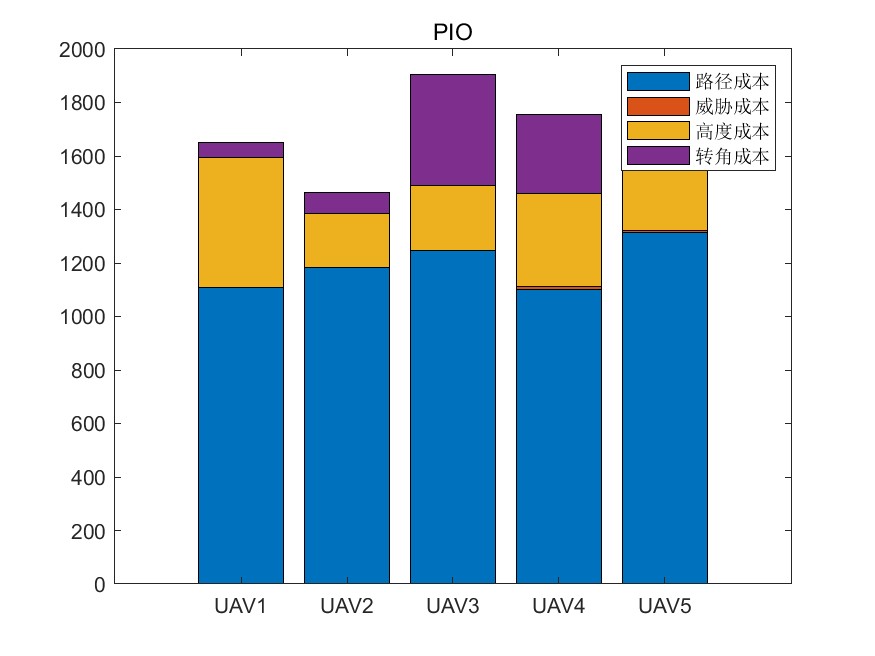
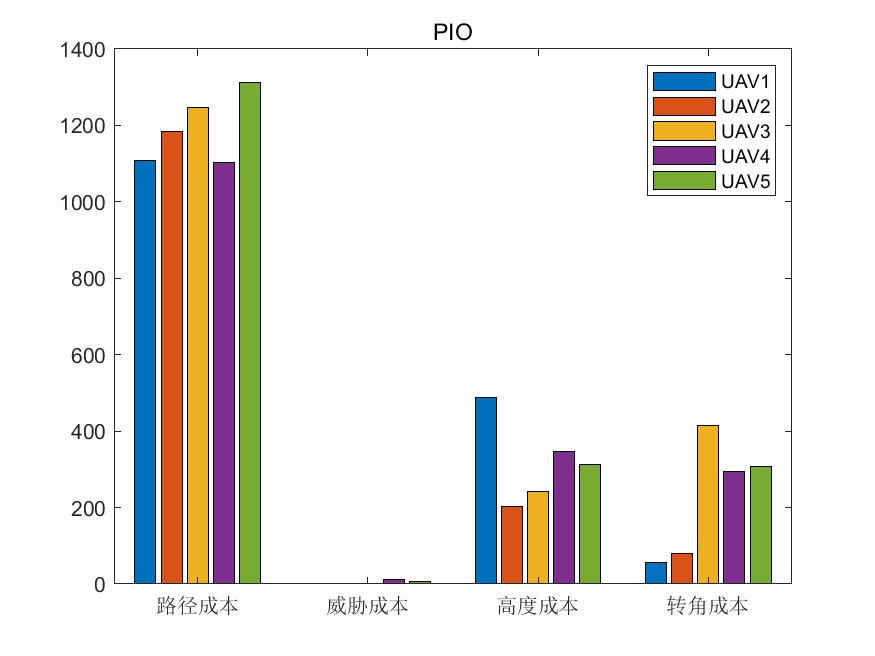
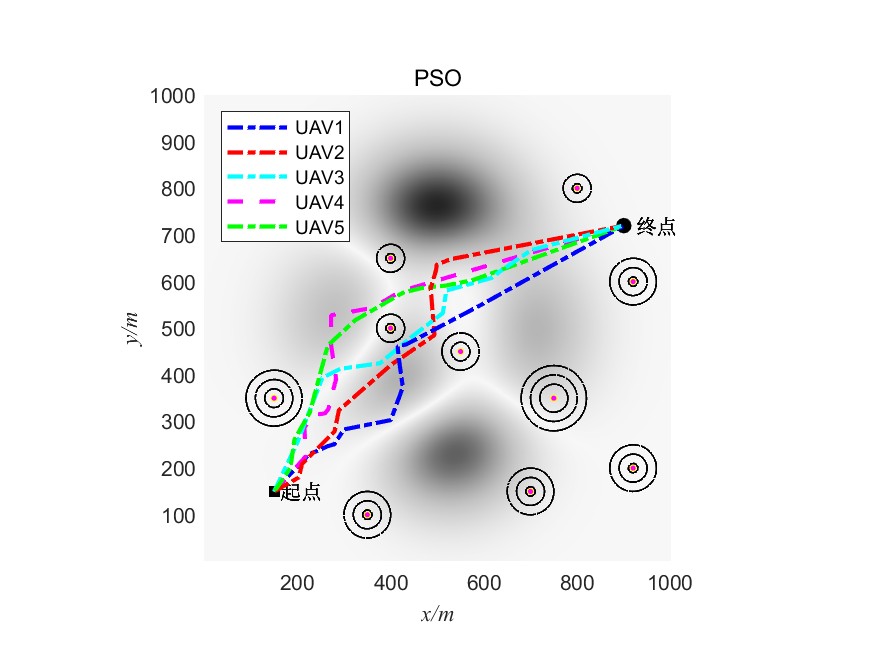
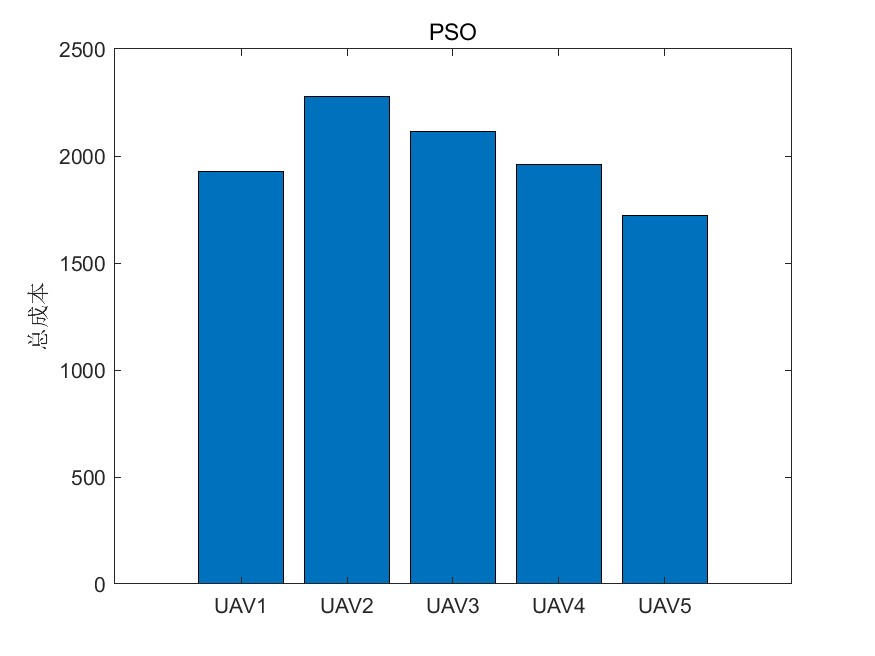
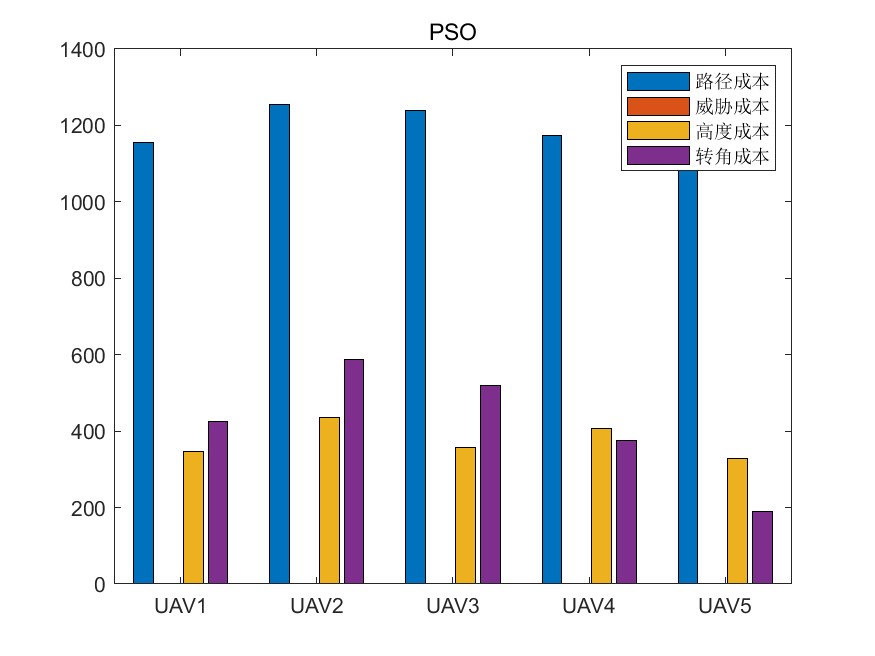
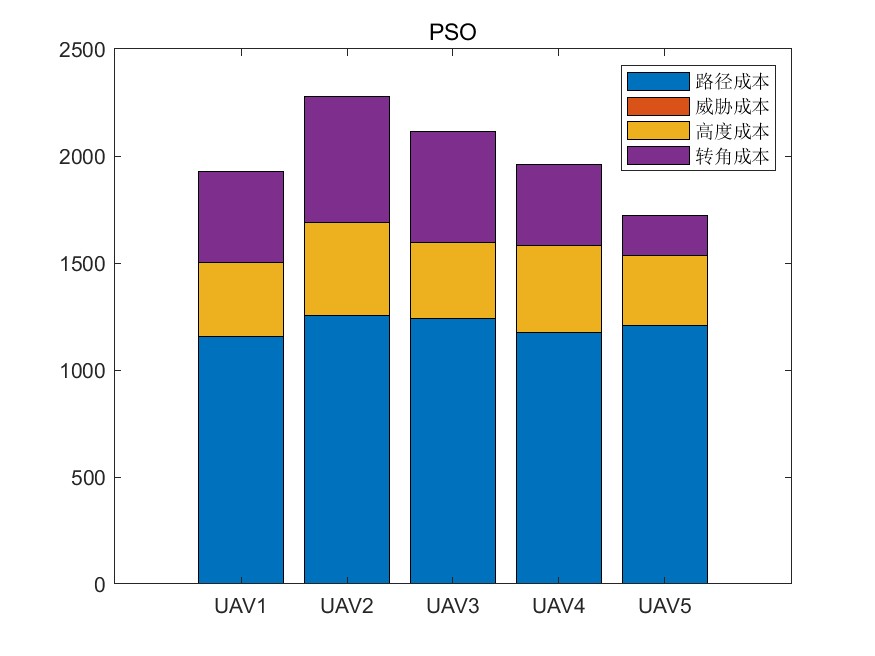
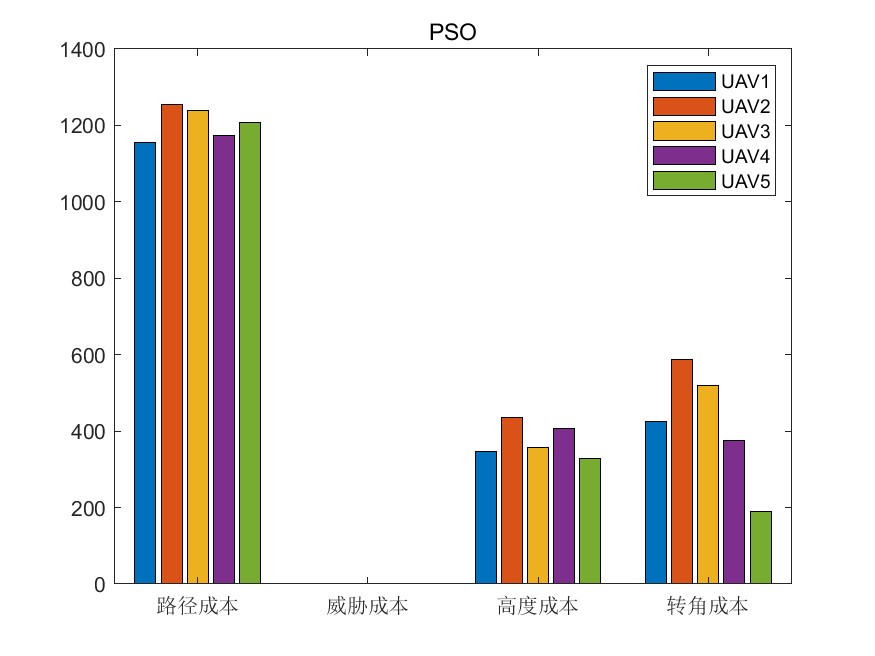
本文中以5个无人机构成无人机集群,采用优化算法同时规划五个无人机的路径,每个无人机的成本由路径成本、威胁成本、高度成本和转角成本四个部分构成。无人机集群的总成本为5个无人机成本之和。
三、四种算法求解无人机集群路径规划
3.1四种算法介绍
3.1、黑翅鸢优化算法BKA
-
原理
- 黑翅鸢优化算法是受黑翅鸢这种猛禽的狩猎行为启发而提出的。黑翅鸢在狩猎过程中展现出独特的策略,如盘旋搜索、俯冲攻击等。算法模拟了这些行为来进行优化搜索。
- 该算法通常包括多个阶段,如全局搜索阶段和局部搜索阶段,以平衡算法的探索和开发能力。
-
特点
- 具有较好的全局搜索能力,能够在搜索空间中广泛地探索潜在的最优解区域。
- 能够自适应地调整搜索策略,根据搜索进程动态地在全局搜索和局部搜索之间切换。
- 对于复杂的优化问题,可能表现出较强的鲁棒性和适应性。
3.2、猎豹优化算法CO
-
原理
- 猎豹优化算法基于猎豹在自然界中的狩猎行为。猎豹以其高速奔跑、灵活转向和精准追捕能力而闻名。算法模仿猎豹的这些特性,通过快速的搜索和精确的定位来寻找最优解。
- 通常包括速度更新和位置更新两个主要步骤,以模拟猎豹的运动。
-
特点
- 具有快速的收敛速度,能够在较短的时间内找到较好的解。
- 对于高维度的优化问题,也能表现出一定的有效性。
- 能够有效地避免局部最优解,提高算法的搜索精度。
3.3、粒子群优化算法PSO
-
原理
- 粒子群优化算法是一种基于群体智能的优化算法。它模拟鸟群或鱼群的群体行为,通过个体之间的信息共享和协作来寻找最优解。
- 每个粒子代表一个潜在的解,具有位置和速度两个属性。粒子根据自身的历史最优位置和群体的全局最优位置来更新自己的速度和位置。
-
特点
- 算法简单易实现,参数较少,调整方便。
- 具有较快的收敛速度,但可能容易陷入局部最优解。
- 适用于多种类型的优化问题,包括连续函数优化和离散组合优化问题。
3.4、鸽群优化算法PIO
-
原理
- 鸽群优化算法源于鸽子在归巢过程中的导航行为。鸽子能够利用地球磁场、地标等信息准确地找到回家的路。算法模拟鸽子的归巢行为,通过地图和指南针算子、地标算子等步骤来进行优化搜索。
-
特点
- 具有较好的全局搜索能力和收敛速度。
- 对于复杂的多模态优化问题,能够有效地找到多个最优解。
- 算法的稳定性较高,不容易受到初始值的影响。
3.5部分代码
close all
clear
clc
dbstop if all error
global model
model = CreateModel(); % 创建模型
F='F1';
[Xmin,Xmax,dim,fobj] = fun_info(F);%获取函数信息
pop=50;%种群大小(可以自己修改)
maxgen=100;%最大迭代次数(可以自己修改)
for i=1:length(algorithName)
Algorithm=str2func(algorithName{i});
[fMin,bestX,ConvergenceCurve] = Algorithm(pop, maxgen,Xmin,Xmax,dim,fobj);
result(i).fMin=fMin;
result(i).bestX=bestX;
result(i).ConvergenceCurve=ConvergenceCurve;
result(i).BestPosition=BestPosition;
result(i).BestFit=BestFit;
result(i).UAVfit=UAVfit;
end
save result result3.6部分结果
部分结果
四、完整MATLAB代码
见下方名片


















 92
92

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









