







目录
准滑动模态控制原理
在滑动模态控制系统中,如果控制结构的切换具有理想的开关特性,则能在切换面上形成理想的滑动模态,这是--种光滑的运动,渐进趋近于原点。但在实际.工程中,由于存在时间上的延迟和空间上的滞后等原因,使得滑动模态呈抖振形式,在光滑的滑动上叠加了抖振。理想的滑动模态是不存在的,现实中的滑动模态控制均伴随有抖振,抖振问题是影响滑动模态控制广泛应用的主要障碍。
所谓准滑动模态,是指系统的运动轨迹被限制在理想滑动模态的某一△邻域内的模态。从相轨迹方面来说,具有理想滑动模态的控制是使一定范围内的状态点均被吸引至切换面。而准滑动模态控制则是使一定范围内的状态点均被吸引至切换面的某一△邻域内,通常称此△邻域为滑动模态切换面的边界层。
在边界层内,准滑动模态不要求满足滑动模态的存在条件,因此准滑动模态不要求在切换面上进行控制结构的切换。它可以是在边界层上进行结构变换的控制系统,也可以是根本不进行结构变换的连续状态反馈控制系统。准滑动模态控制在实现上的这种差别,使它从根本上避免或削弱了抖振﹐从而在实际中得到了广泛的应用。
在连续系统中﹐常用的准滑动模态控制有以下两种方法:
1. 用饱和函数sat( s)代替理想滑动模态中的符号函数sgn(s)。
其中△称为“边界层”。饱和函数sat(s)如图1所示。饱和函数的本质为:在边界层外,采用切换控制;在边界层之内,采用线性化反馈控制。
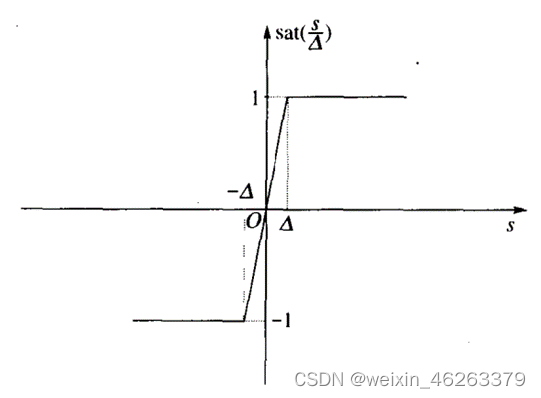
图1 饱和函数
2.将继电特性连续化,用连续函数q(s))取代sgn(s)。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 4285
4285











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











