







 超级会员免费看
超级会员免费看
论文作者:温伯文(作者授权) | 编辑:3DCV
添加微信:dddvision,备注:6D位姿估计,拉你入群。文末附行业细分群

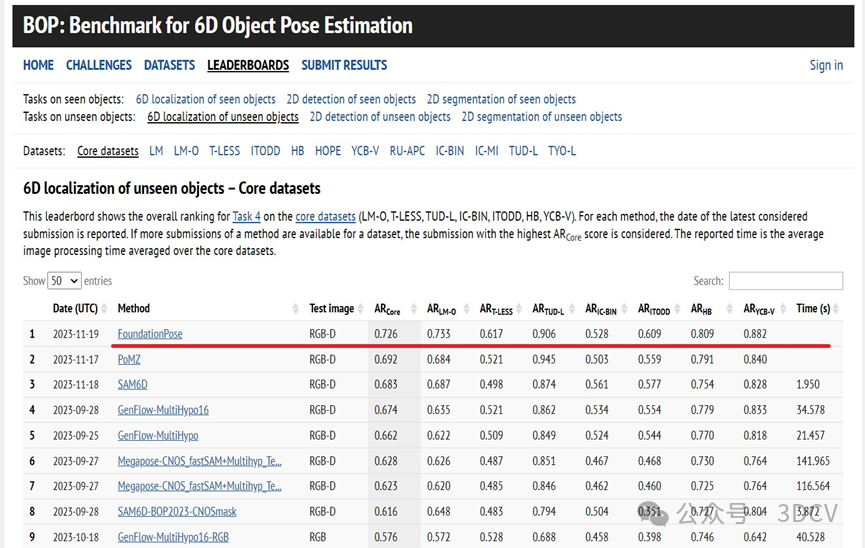
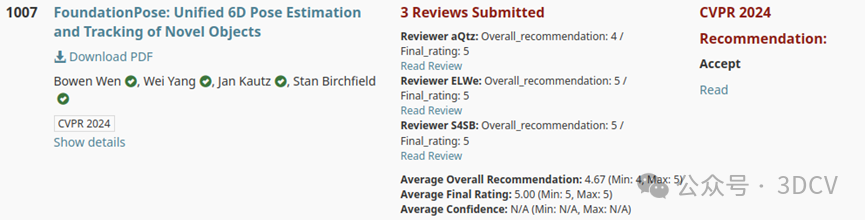
标题:FoundationPose: Unified 6D Pose Estimation and Tracking of Novel Objects
论文地址:https://arxiv.org/abs/2312.08344
项目主页:https://nvlabs.github.io/FoundationPose/
开源代码:https://github.com/NVlabs/FoundationPose
Demo展示
,时长04:12
1.导读
我们提出了FoundationPose,这是一个统一的大模型,用于6D物体姿态估计和跟踪,支持基于模型和无模

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 140
140











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









