






 RoboticsToolbox是Peter团队为机器人学研发提供的MATLAB软件工具包,包含运动学、动力学等算法。提供了三种安装方式:下载.mltbx文件安装,从GitHub克隆源代码,以及通过MATLABDrive。用户可以根据需求和MATLAB版本选择合适的方法。
RoboticsToolbox是Peter团队为机器人学研发提供的MATLAB软件工具包,包含运动学、动力学等算法。提供了三种安装方式:下载.mltbx文件安装,从GitHub克隆源代码,以及通过MATLABDrive。用户可以根据需求和MATLAB版本选择合适的方法。
为机器人学研究和开发提供一个集成的软件工具包,以便研究人员和工程师能够更方便地开发、测试和控制机器人系统,Peter团队开发了Robotics Toolbox工具箱,Robotics Toolbox通常包括用于运动学、动力学、路径规划、控制等方面的算法和工具。这些工具可以帮助研究人员在仿真环境中设计和验证机器人系统,也可以用于实际的机器人控制。
工具箱介绍和安装方法见链接:https://petercorke.com/toolboxe
官方给了三种安装方法,个人按照安装由易到难依次介绍:
第一种:下载 MATLAB Toolbox 安装文件(.mltbx 类型,强烈推荐)
(1)下载软件包
点击链接,进入官方主页,往下翻,找到Install from .mltbx file,点击下载链接下载RTB10.4.mltbx
https://petercorke.com/toolboxes/robotics-toolbox/ 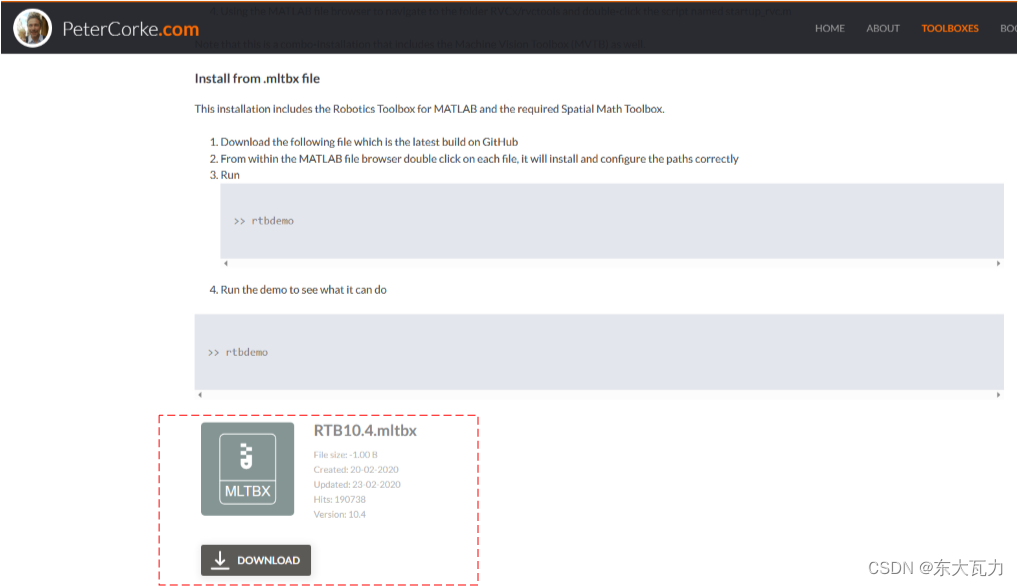
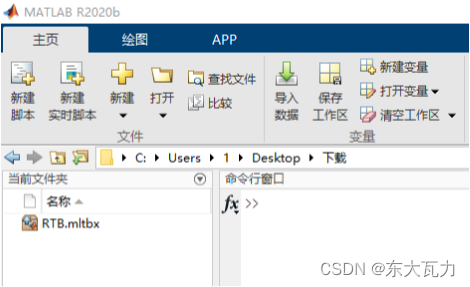
(2)安装
打开matlab,在matlab工作空间找到安装包,双击打开RTB.mltbx,选择合适的文件夹进行安装。
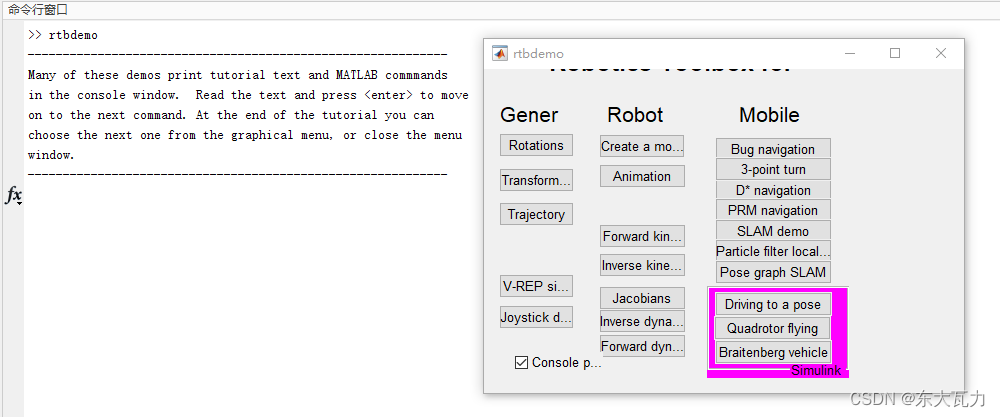
(3)测试
在matlab命令窗口执行如下命令
rtbdemo
第二种:从 GitHub 克隆源文件
从MATLAB命令行克隆以下三个存储库(MATLAB利用git官方教程:https://ww2.mathworks.cn/help/matlab/matlab_prog/clone-from-git-repository.html)
>>git clone https://github.com/petercorke/robotics-toolbox-matlab rtb
>>git clone https://github.com/petercorke/spatial-math smtb
>>git clone https://github.com/petercorke/toolbox-common-matlab common
然后在 MATLAB 中将这些文件夹添加到您的路径中:
>>addpath RTB Common SMTB
这将仅适用于当前会话。您可以在每个会话中重复此命令,通过将它添加到 MATLAB 脚本来自动执行它,或者用于保存当前路径配置以供下次使用。startup.mpathtool
第三种:直接访问共享的 MATLAB Drive 文件夹(适用于 MATLAB19a 及更高版本,不推荐)
这将适用于 MATLAB Online 或 MATLAB 桌面,前提是您具有 MATLAB 驱动器设置。
请注意,这也包括机器视觉工具箱 (MVTB)。
单击下面的相应链接,共享邀请将通过电子邮件发送到与您的 MATLAB 帐户关联的地址:
RVC 第 1 版: https://drive.matlab.com/sharing/0442fc1b-5b9e-45c8-abf9-54cbbd00082a
RVC 第 2 版:https://drive.matlab.com/sharing/e668b3b4-a452-464b-8e6e-77280e6cce21
接受邀请。
名为 RVC1 或 RVC2 的文件夹将出现在您的 MATLAB 驱动器中
使用 MATLAB 文件浏览器导航到文件夹 RVCx/rvctools,然后双击名为 startup_rvc.m 的脚本
请注意,这是一个组合安装,还包括机器视觉工具箱 (MVTB)。

















 2257
2257

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









