







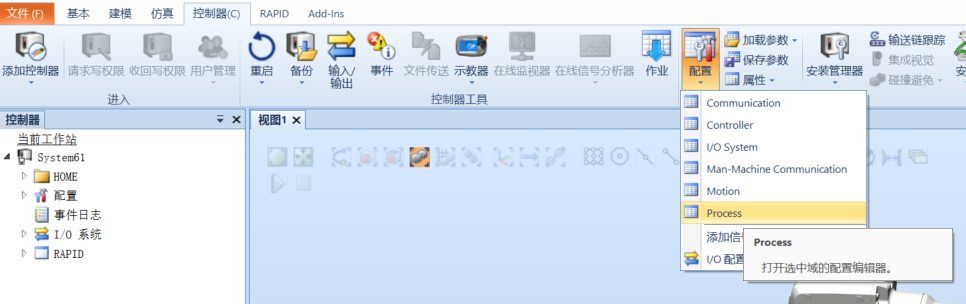
1.基本配置
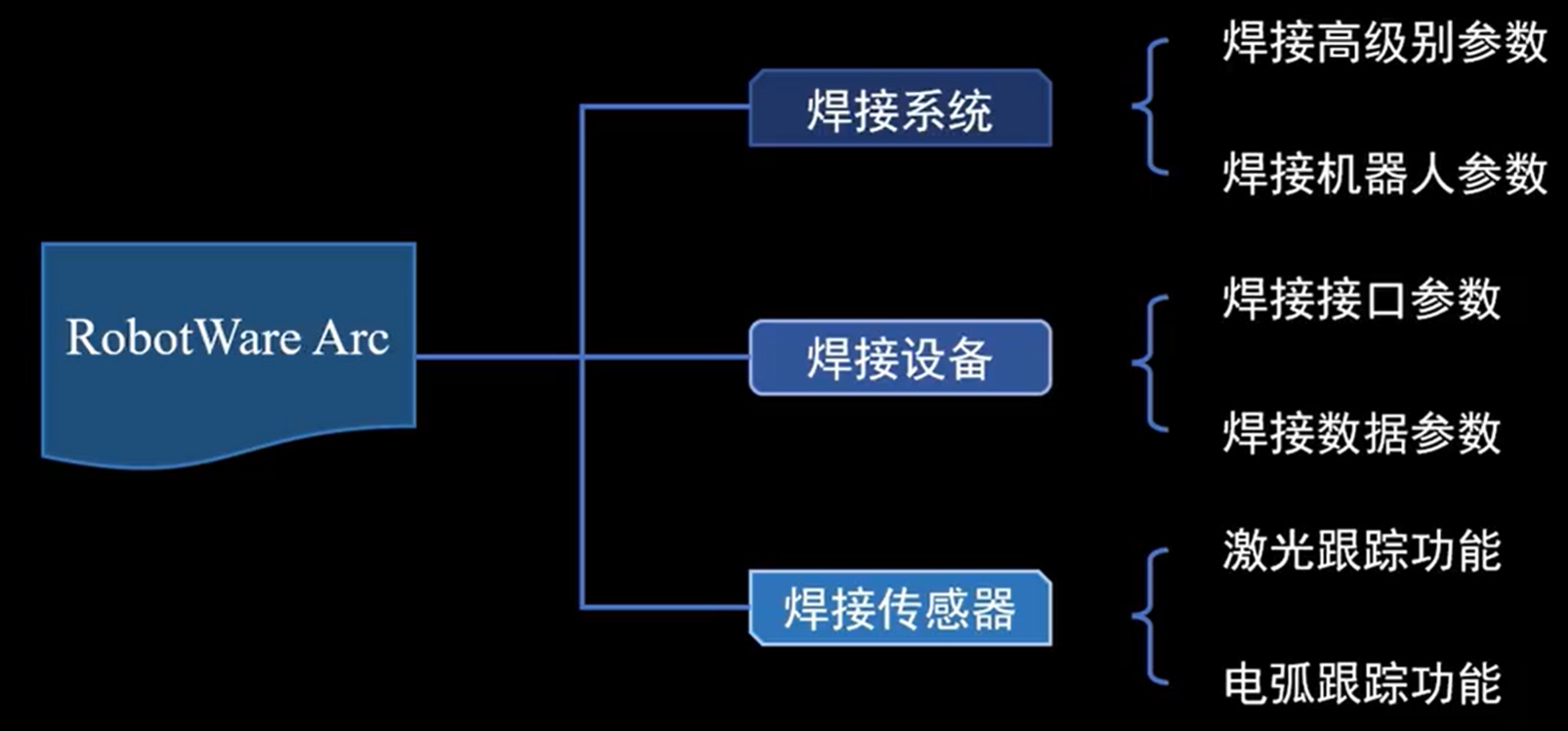
1.2配置Robot Ware Arc
2.焊接语句
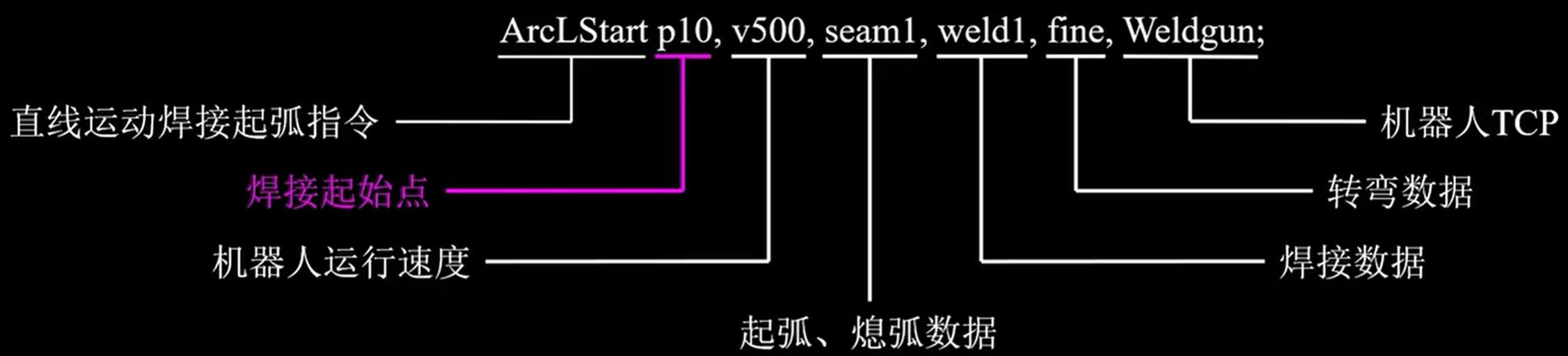
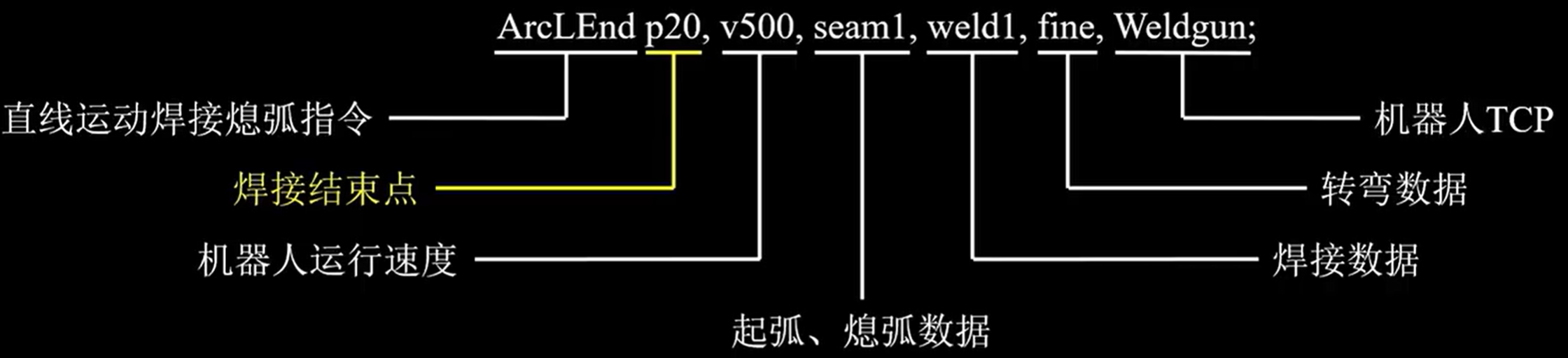
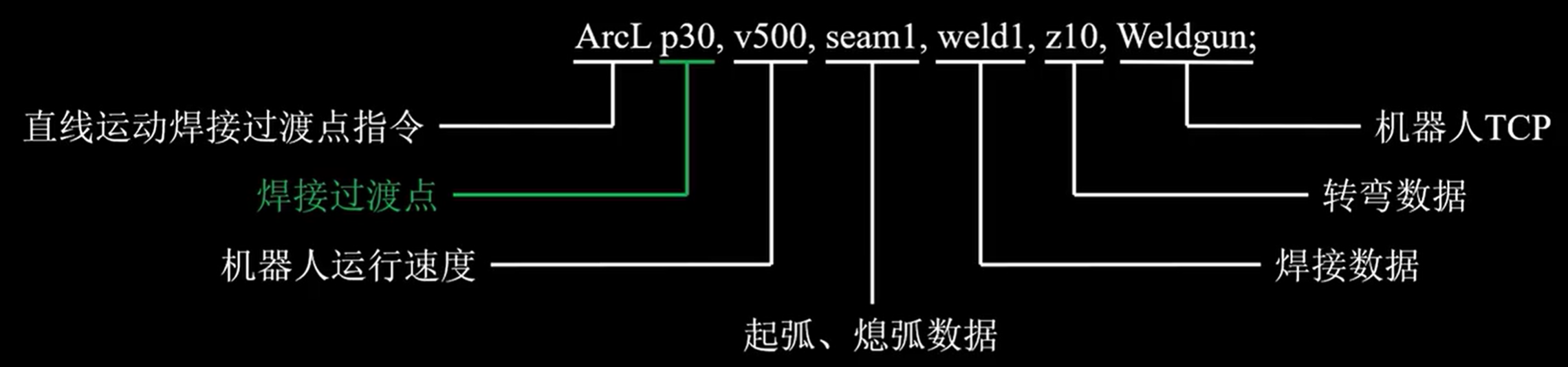
2.1直线焊接语句
过渡点指令必须位于起弧指令与熄弧指令之间,不能单独使用。
2.2直线焊接示例

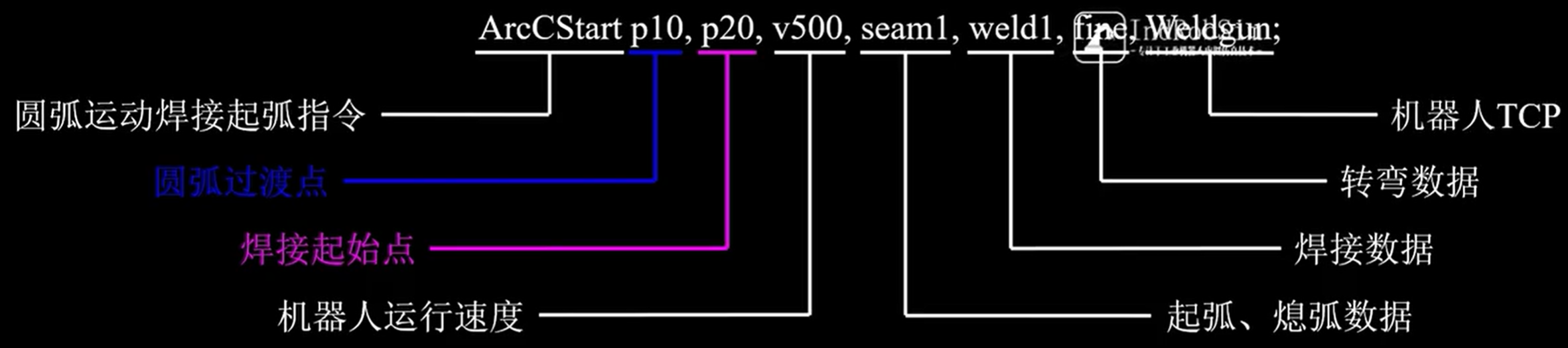
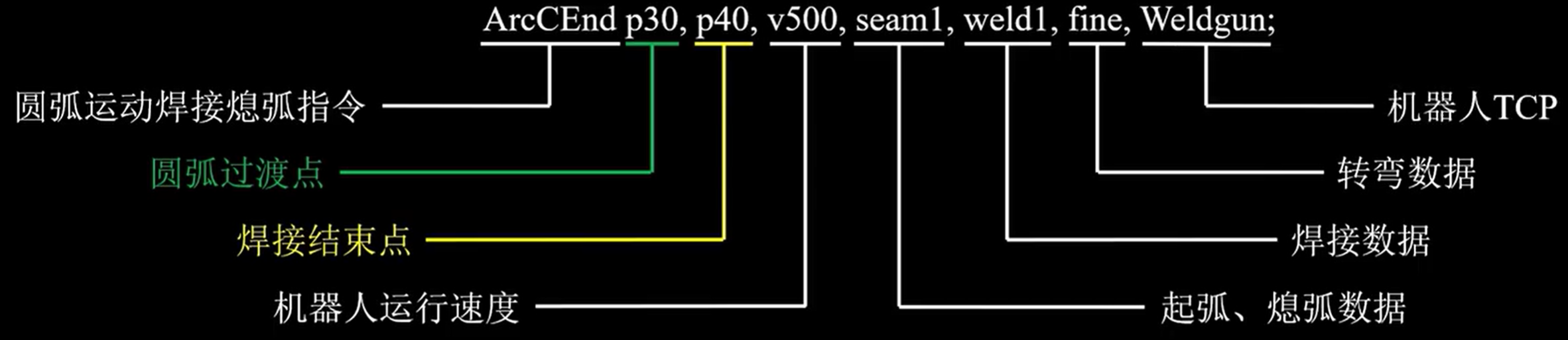
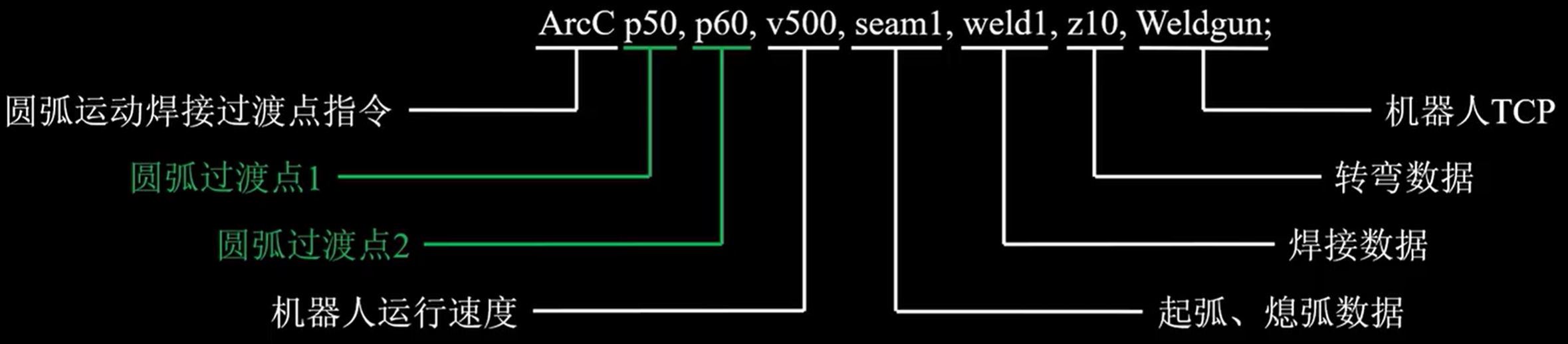
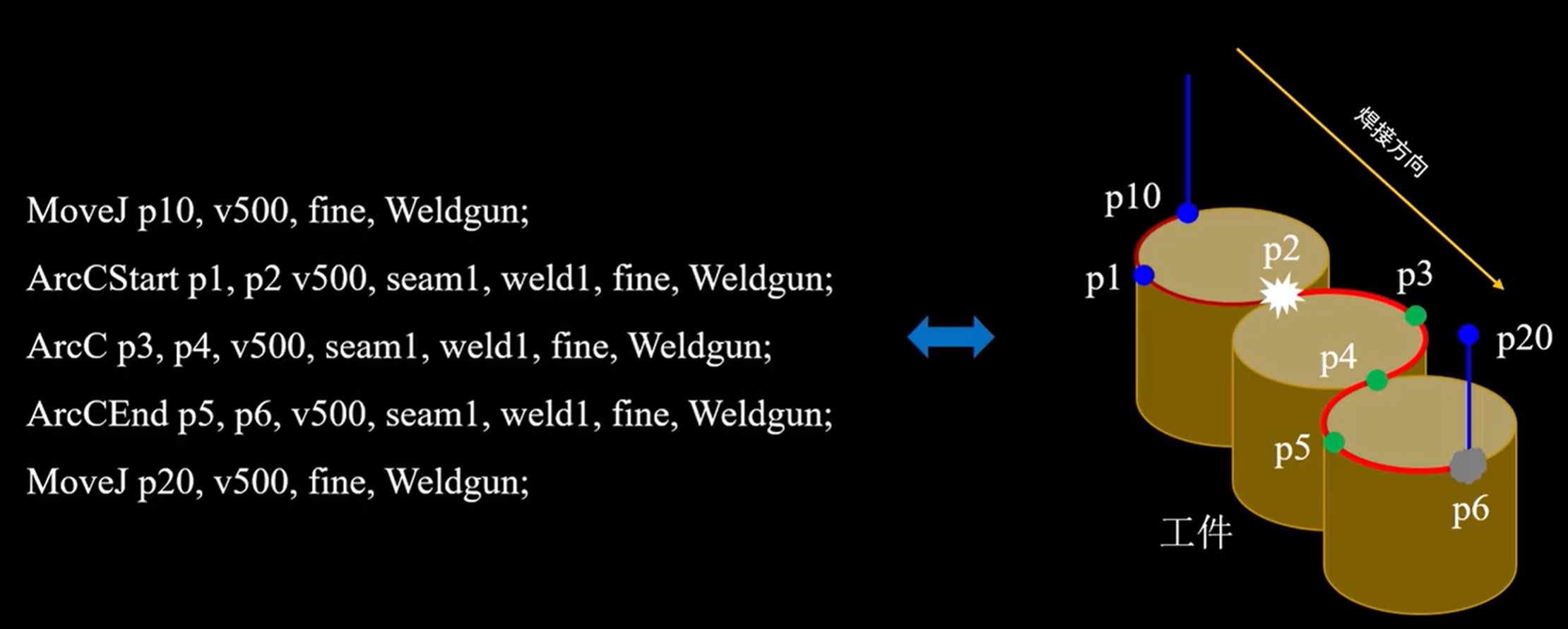
2.3圆弧焊接语句
2.4圆弧焊接示例
2.5摆动参数
关于ABB焊接机器人摆动参数设定
一般情况下,主要设置以下五个参数基本就可以满足常规焊接要求。如下图
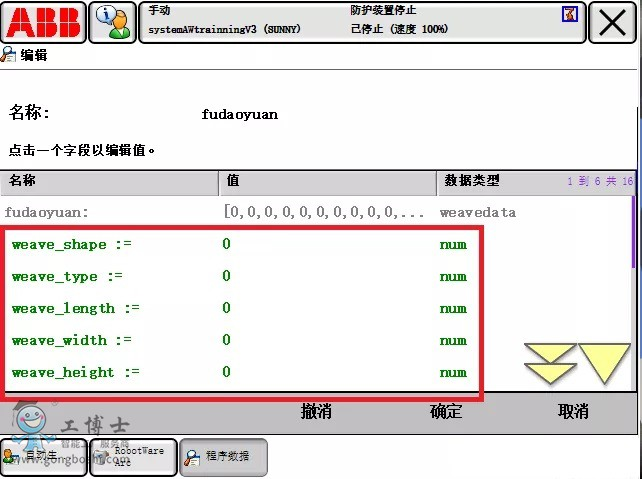
主要设定的五个参数如下:(下面是一些参数的具体定义,按照实际中具体要求设置即可)
(1) Weave shape (摆动的形状)
• 0 no weaving 表示没有摆动
• 1 zigzag weaving 表示Z字型摆动
• 2 V-shaped weaving 表示V字型摆动
• 3 Triangular weaving 表示三角形摆动
(2)Weave type (摆动模式)
• 0 表示机器人的6根轴都参与摆动
• 1 表示5轴和6轴参数摆动
• 2 表示1,2,3轴参与摆动
• 3 表示4,5,6轴参与摆动
(3)Weave length(摆动工具一个周期的距离)
表示一个摆动周期机器人的工具坐标向前移动的距离
(4)Weave Width
表示摆动宽度
(5)Weave height
表示摆动的高度,只有在三角摆动和V字摆动时此参数才有效
备注:一般情况设置以上参数即可,下面的一些参数主要是微调,焊接要求不高的情况下基本可以忽略。
另外关于摆动的其他参数设定定义,根据实际需求进行微调整即可。
Weave data components
dwell_left (摆动过程中在摆动左边时运动的距离)
dwell_right(摆动过程中在摆动左边时运动的距离)
dwell_center (摆动过程中在摆动中间时运动的距离)
weave_dir (摆动倾斜的角度,焊缝的X方向)
weave_tilt (摆动倾斜的角度,焊缝的Y方向)
weave_ori (摆动倾斜的角度,焊缝的Z方向)
weave_bias (摆动中心偏移)

















 943
943

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









