







相机标定
最近在使用Quanser的地面车做实验,需要用到OptiTrack系统进行定位,记录一下使用过程,供需要的人参考。
本文参考了以下博客:
-
https://blog.csdn.net/banzhuan133/article/details/77938083
-
https://www.pianshen.com/article/93051595787/
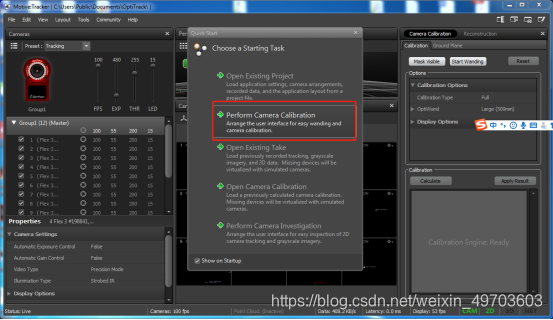
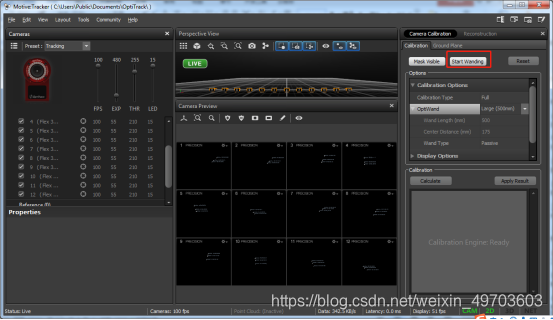
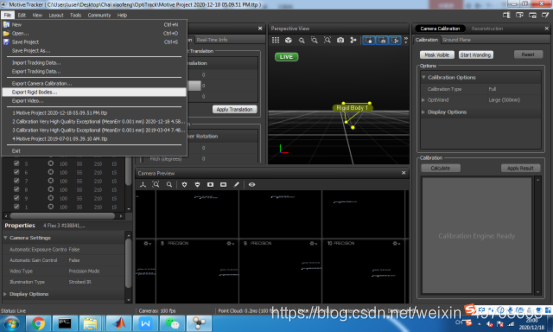
- 打开Motive软件,选择 Perform Camera Calibration
界面如下所示,分为四个区域。
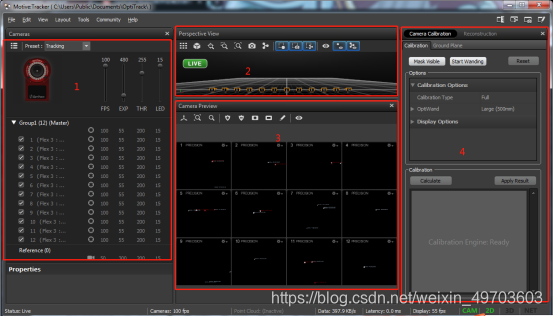
- 区域1:Cameras窗口中可以设置相机的相关参数,依次为FPS(帧频:相机每秒中采集的帧数),EXP(曝光时间),THR(阈值:通过调整阈值可以滤去过亮的干扰点),LED(改变镜头周围LED灯投射的近红外光的亮度),可以同时改变所有相机的参数,也可以单独改变某个相机的参数。
- 区域2:立体图视角
- 区域3:12个相机各自的视野
- 区域4:校正标定参数设置
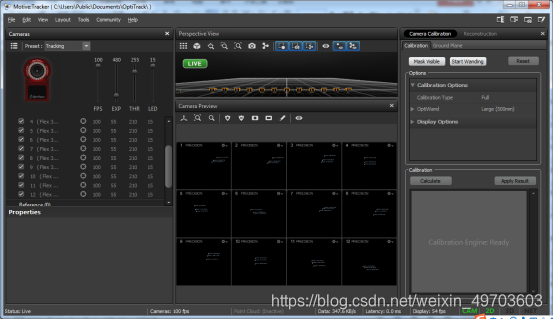
- 通过调整THR,以及对场地内干扰光源进行移除/遮挡,使得场地内只能够识别目标光源
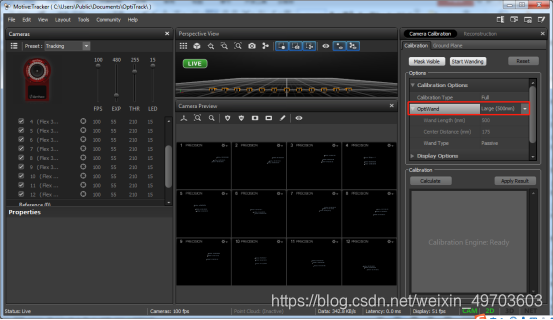
- 选择标定杆型号(大型,500mm)
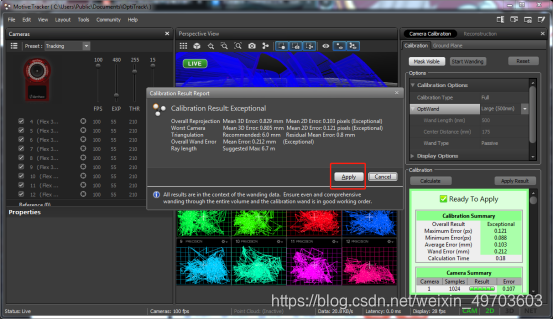
- 点击:start wanding,场地内进行游走,积累标定数据。手持装有标记点的标定杠在所有相机都能捕获的公共区域去进行晃动,尽量保证每一区域都能均匀挥舞到。知道每个相机的标定点个数都达到1000以上,就可以点击Calculate进行计算了。
- Apply, 保存结果
- 这时候我们已经通过计算得到了相机的相对位置,接下来将如下所示水平仪放入场地中央。
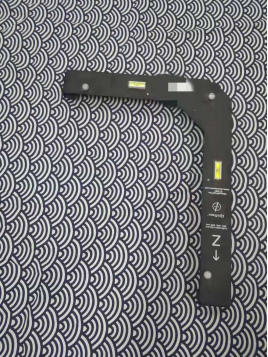
在perspective view视角,选中水平仪三个亮点,然后点击右侧set ground plane
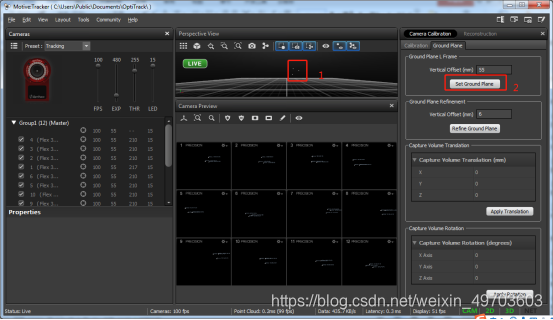
保存标定文件与工程
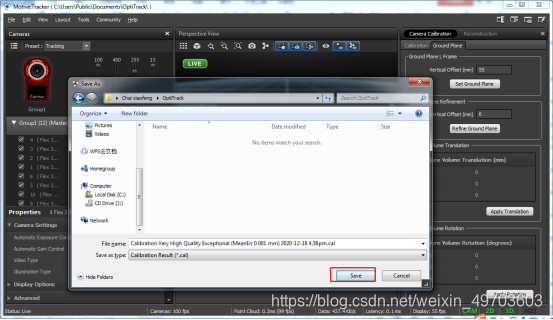
至此相机标定全部完成,以后使用的时候,直接打开本次工程即可。
注意1:场地如果反光,可以通过通过调节相机THR值进行过滤;对于实在无法去除的标志点,可以选择Camera Calibration 窗口中Calibration 选项卡下的Block Visible选项去除画面中无法消除的干扰点。
标定刚体
-
首先将标记球固定在需要定位的物体上,如下所示:

注意2:至少需要三个Mark,图中只有两个,我后来又加了一个。 -
打开上次标定的工程,将目标刚体放入场地中央,在perspective view视角中选中光点,rigid body->creat from selected marks
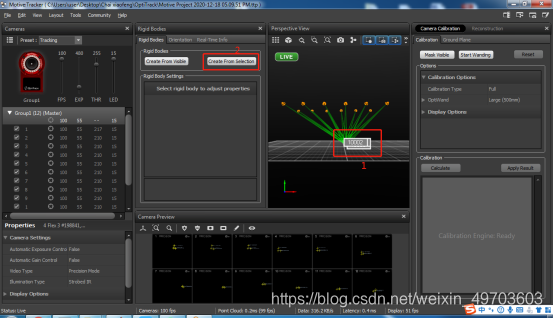
-
设置中心点位置。选中顶点mark,鼠标右击,rigid body->set pivot point to selected marker。
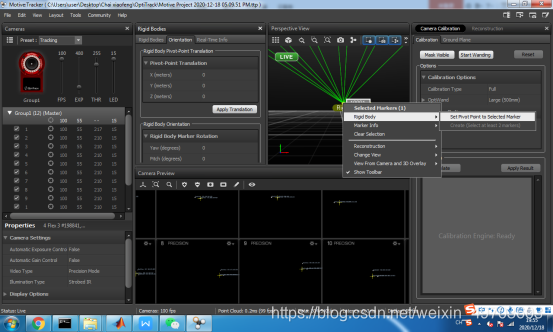
-
将中心点位置下移到真正的中心,左边控制面板orientation,修改y轴为-0.14(顶点距离中心的距离的负值),然后apply translation。
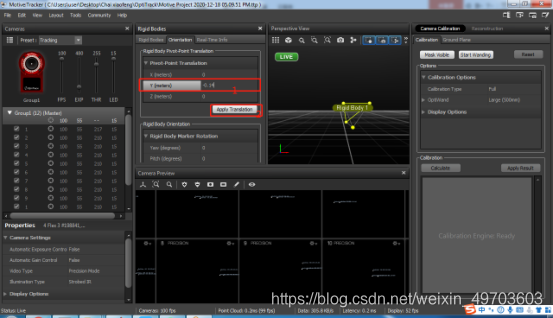
-
保存刚体文件为(.tra格式)

















 1845
1845

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









