







目录
准备
 https://class.guyuehome.com/detail/v_61ca6c7ce4b07eba4cefbc6e/3?from=p_61c9287be4b09ac9b9113173&type=6&parent_pro_id=
https://class.guyuehome.com/detail/v_61ca6c7ce4b07eba4cefbc6e/3?from=p_61c9287be4b09ac9b9113173&type=6&parent_pro_id=以下为讨论区链接
 https://www.guyuehome.com/Bubble/circleDetail/id/79
https://www.guyuehome.com/Bubble/circleDetail/id/79Github:https://github.com/guyuehome/guyueclass/tree/main/simulation&control
码云:https://gitee.com/guyuehome/guyueclass/tree/main/simulation&control
课程框架

预备知识
 抓取算法的分类与应用场景
抓取算法的分类与应用场景
概述


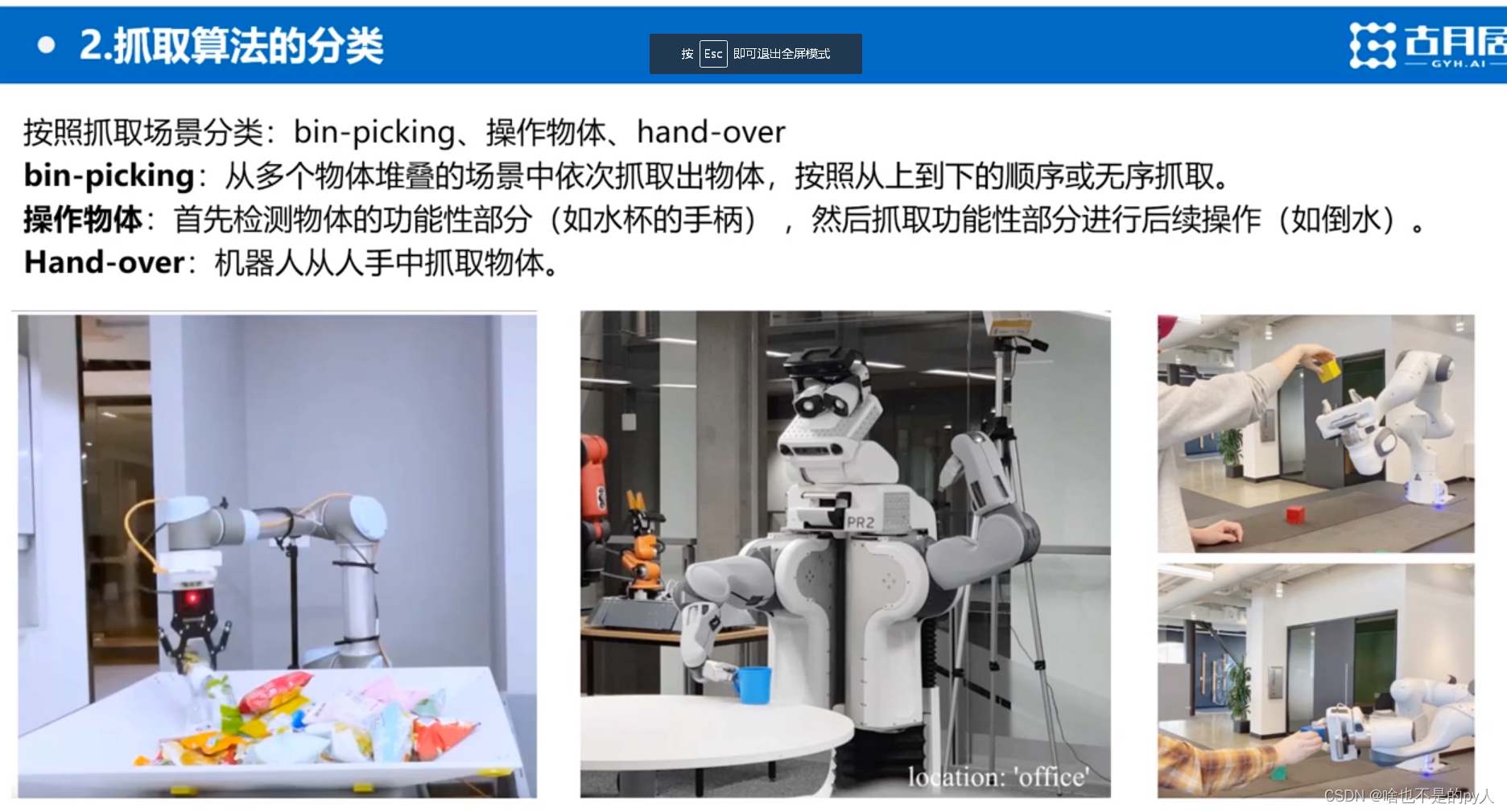
bin-picking:把盒子里的杂乱物体抓取出来
hand-over:从人手中接物体
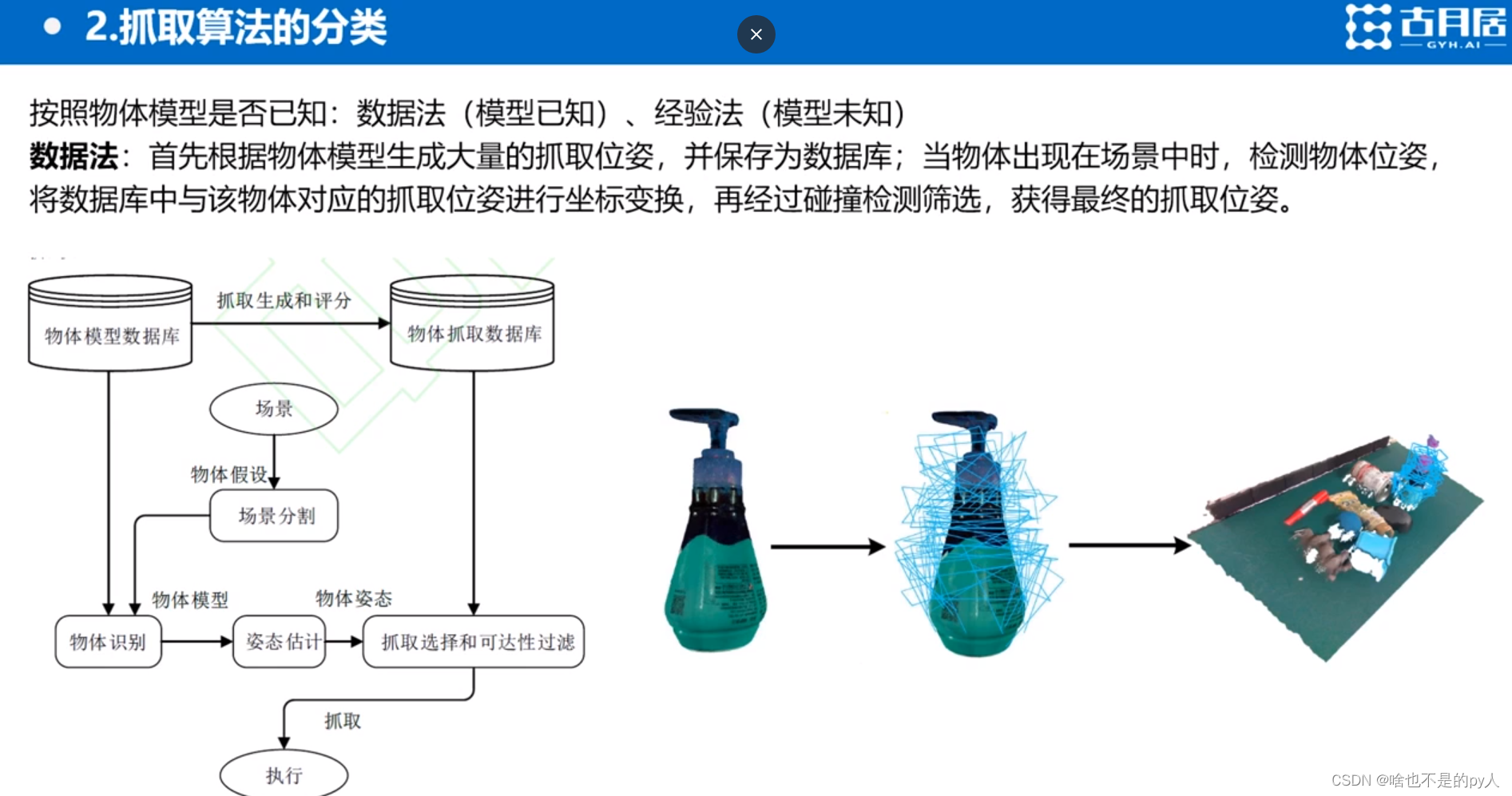
1.现根据数据集生成大量抓取位姿,并保存为数据库
2.是检测物体的位姿:四元数
3.坐标变换:要把数据库中的坐标变换位姿变换到实际的位姿,形状不变旋转坐标
4.再通过碰撞检测完成任务
算法分类

举例:
经验法
1.用数据集(Dex-Net)训练出抓取算法(包含对应抓取位姿的成功率)
2.输入抓取物的视觉信息
3.对输入的物体匹配给出几种抓取位姿,并进行给出抓取成功率
4.输出置信度最高的抓取位姿进行抓取


基于彩色图像抓取:容易被相同颜色的图像迷惑
左下角的图是去年cvpr的以点云输入最终输出7dof的抓取

需要操作物体的一般都是要6dof抓取位姿
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









