









目录
前言
需求说明:
需要在realsense的路径下导入Kinova的驱动接口

需要导入的包在这里
 步骤:
步骤:
1.sys导入目标文件夹的路径
2.直接import需要的文件或者函数及类
import sys
sys.path.append('/home/pxing/codes/Kinova/kinova_ws/src/kinova_task/scripts')
from kinova_ctrl import KinovaCtrl
references:python 导入其他目录下的模块_wzg2016的博客-CSDN博客
报错解决:
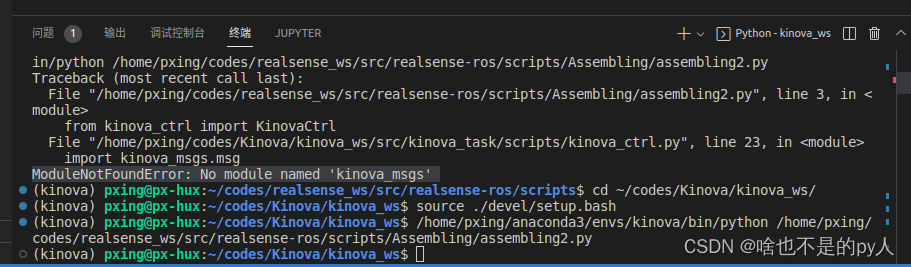
这个报错是因为在这个运行终端里没有ros的环境变量
需要source一下需要运行的ros包的环境变量
(kinova) pxing@px-hux:~/codes/realsense_ws/src/realsense-ros/scripts$ cd ~/codes/Kinova/kinova_ws/
(kinova) pxing@px-hux:~/codes/Kinova/kinova_ws$ source ./devel/setup.bash然后就可以运行了
















 232
232











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









