







文章目录
摘要
对于三维点云补全,倒角距离(CD)和地球移动距离(EMD)是最常用的性能标准。CD试图找到两组点之间的最小距离,而EMD评估点云的重建质量。以下介绍点云补全常用的几个性能标准。
参考学习框架来自于综述《Comprehensive Review of Deep Learning-Based 3D Point Cloud Completion Processing and Analysis》
一、Chamfer Distance (CD)
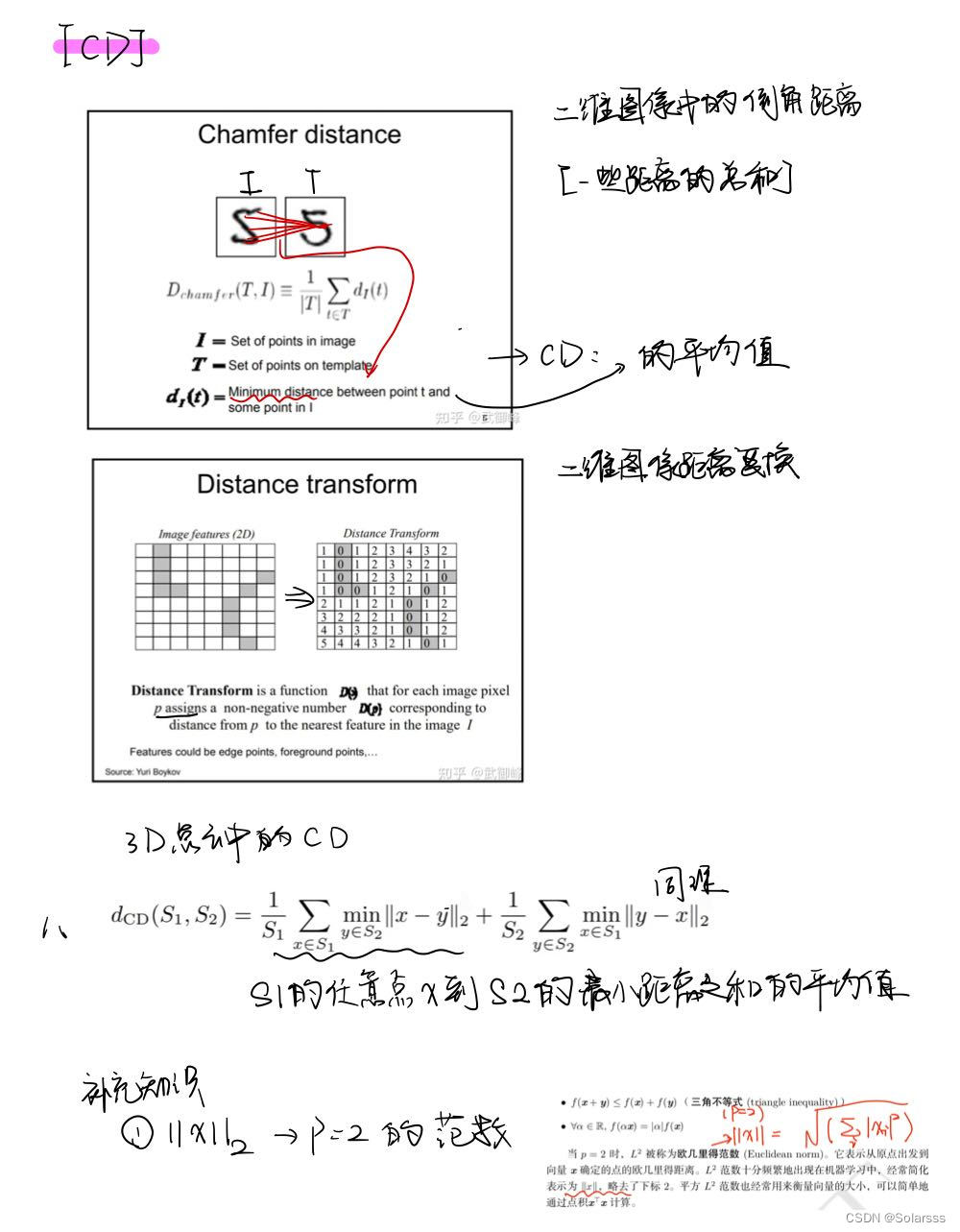
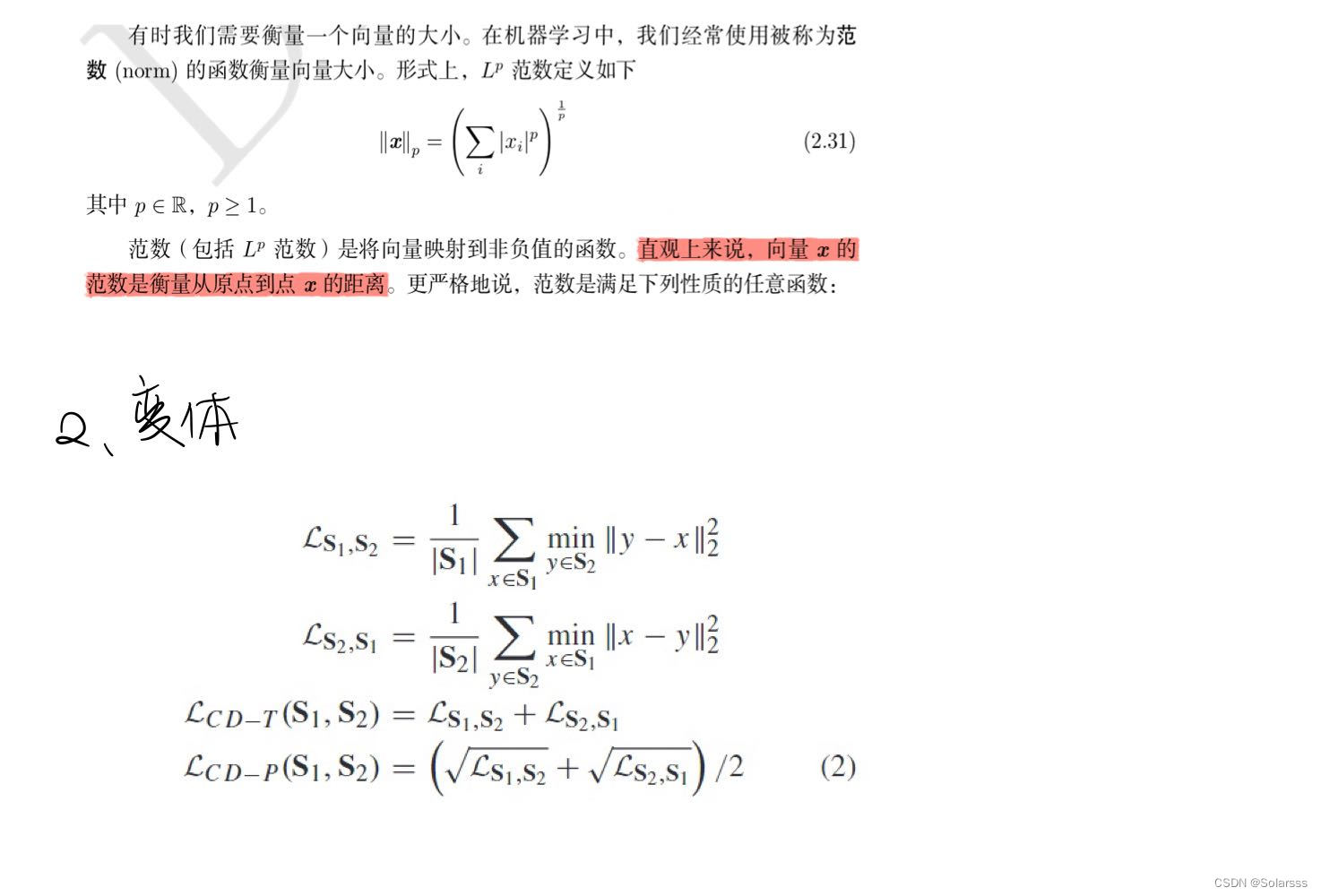
如果该距离越大,说明两组点云的差异越大; 距离越小,说明重建效果越好。
二、Earth Mover’s Distance (EMD)
EMD 旨在找到一个双射 φ : S1 → S2 以最小化对应点与部分点和完整点之间的平均距离。与 CD 不同,S1 和 S2 的大小需要相同。

三、Fidelity Error (FD), Maximum Mean Discrepancy (MMD) and Consistency
保真度误差(FD)、最大平均差异(MMD)和一致性
PCN提出了保真度误差(FD)、一致性和最小匹配距离(MMD)作为评价指标。保真度用于衡量输入保留的程度,它计算输入中点与输出中的相应最近邻之间的平均距离。MMD 用于衡量模型的输出重建典型汽车的程度。一致性旨在估计模型的输出与输入的变化的一致性
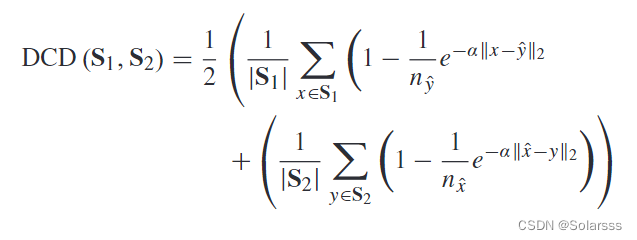
四、Density-Aware Chamfer Distance (DCD)
密度感知倒角距离(DCD)
DCD源自 CD,它可以检测密度分布的差异。DCD既关注整体结构,又关注局部几何细节。
五、F-Score
Tatarchenko 等人提出的 F 分,是评估对象表面之间的距离,并被视为精度和召回率之间的调和平均值。精度计算重建点在与地面真实值一定距离内的百分比,代表重建的准确性。另一方面,召回计算到重建一定距离内地面实况上的点的百分比,表示重建的完整性。距离阈值可用于控制 F 分数的严格性。F-score 可以评估正确重建的点或表面积的百分比,其定义如下:

其中 P(d) 和 R(d) 分别表示距离阈值 d 的精度和召回率。
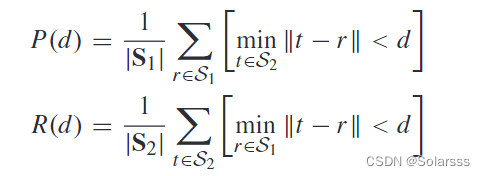
其中 S1 是正在评估的重构点集,S2 是基本事实。|S1| 和 |S2|分别是 S1 和 S2 的点数。
六、Uniformity
均匀性通常用于评价已完成点云的分布均匀性,可表示为:

其中 Q i (i = 1, 2,., M) 是一个点子集,使用半径 √ p 的最远采样和球查询从输出 S1 的补丁裁剪。术语 U 不平衡和 U杂波分别解释了全局和局部分布均匀性。
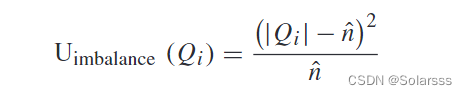
其中 ^n = p|S1| 是 Q i 中的预期点数。
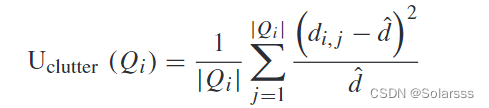
其中 di, j 表示到 Q i 中第 j 个点的最近邻居的距离,如果 Q i 具有均匀分布,则 ^d 大致为

。

















 820
820

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









