







上一篇介绍了利用李雅普诺夫稳定性理论设计模型参考自适应系统,通过在被控对象前面添加一个可调增益,然后利用李雅普诺夫稳定性理论设计增益
的自适应率
,使得被控对象输出与参考模型输出一致。本文将介绍在系统结构中引入前馈和反馈的结构,然后利用李雅普诺夫稳定性理论设计MRACS。
1、系统介绍
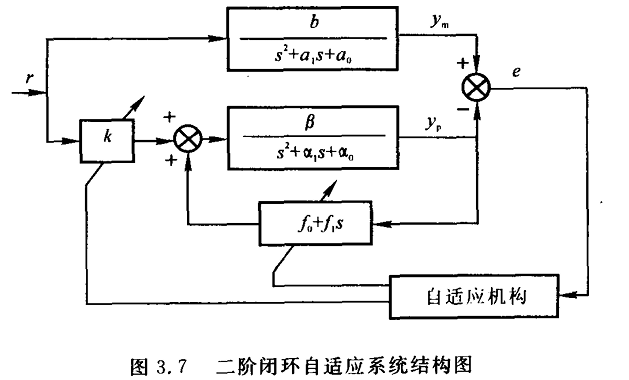
根据被控对象和参考模型的表示形式不同,可以分为利用系统状态变量设计自适应率和利用控制对象的输入输出设计自适应率。状态变量系统框图如下(其实,不管被控对象和参考模型是状态变量形式还是微分方程或者传递函数形式,其本质都是一样的。):
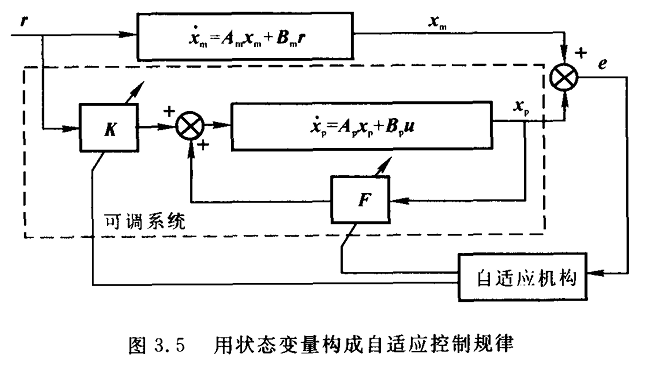
这里以状态变量形式的自适应系统结构框图来解释一下:为什么利用李雅普诺夫稳定性理论设计MRACS,系统结构框图是在被控对象前面增加一个前馈和反馈。
因为被控对象参数是不能直接调整的,要想改变被控对象的动态特性,只能引入前馈和反馈,其中前馈
影响输入矩阵
,反馈
影响系统矩阵
(至于为什么,见第二节自适应率设计)。
2、自适应率设计
2.1 状态方程形式
2.1.1 理论推导
自适应系统结构框图如上,不管系统引入什么框架,记住核心目标就是,使得广义误差 (这里是广义状态误差)为0。
被控对象的输入:
被控对象状态方程:
从这里可以看出,引入反馈影响系统矩阵
,引入前馈
影响输入矩阵
(这里的
,
和原来的不一样)。
广义状态误差:
求导可得,
在理想情况下,广义状态误差满足
,只有满足这样的线性模型,根据李雅普诺夫稳定性理论才能得到广义状态误差在原点渐近稳定。
设前馈和反馈
的理想值分别为
,使得:
可得,
带入误差导数方程可得,
其中,,称为可调参数误差矩阵。
构造李雅普诺夫函数:
这里和利用李雅普诺夫稳定性理论设计模型参考自适应系统选取准则一样,想要广义状态误差趋于0的同时,还希望反馈矩阵
和前馈矩阵
与它们的理想值越接近越好,即
趋于0。
那么可以构建李雅普诺夫函数:
其中, 为对称正定矩阵。
求导可得,
将
先计算前两项,
根据迹的性质,
可得,
带入可得,
要使,令
根据第一个式子可以求得矩阵,再判断其是否正定;
根据第二个式子可得,
根据第三个式子可得,
又,可得
可得,
最后变化规律为
2.1.2 例题
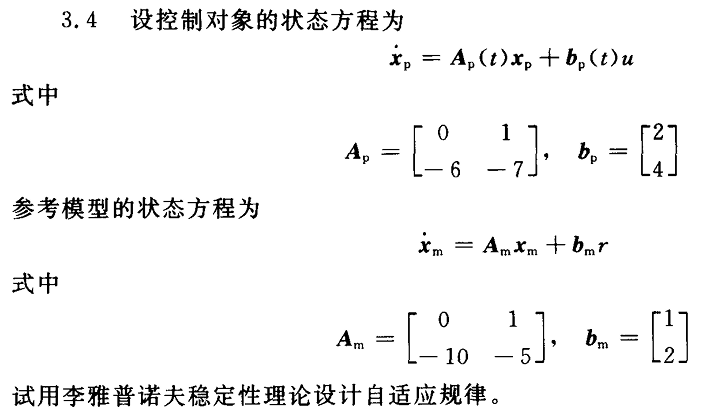
引入前馈增益矩阵和反馈增益矩阵
,可得被控对象的输入
:
被控对象状态方程:
由等式
可得,
设,由
可得,
解得,
可得正定,系统渐近稳定。
由题可得,系统输入维数为1,可设
,
根据公式
可得,
其中,。
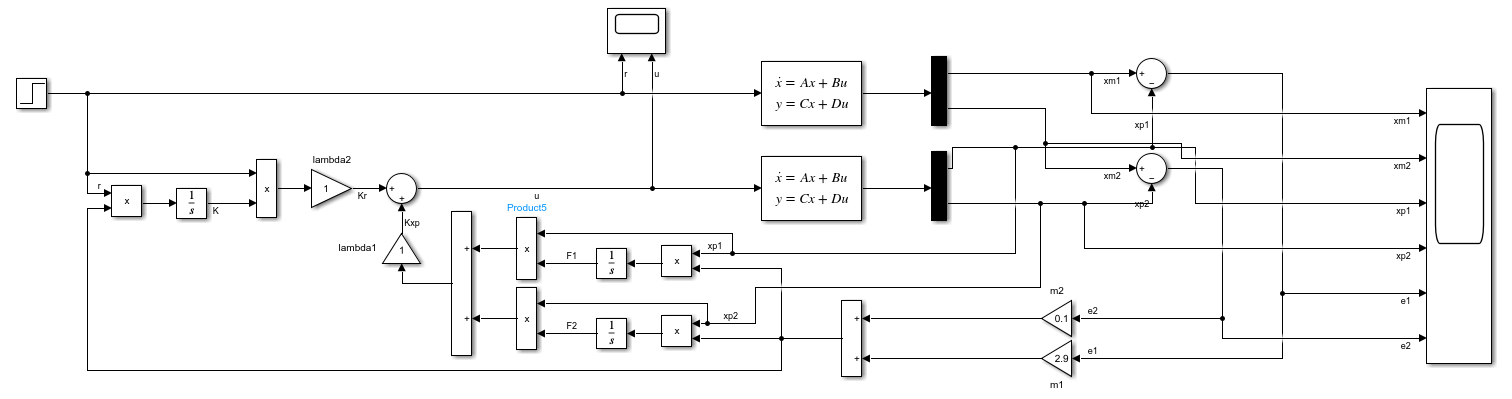
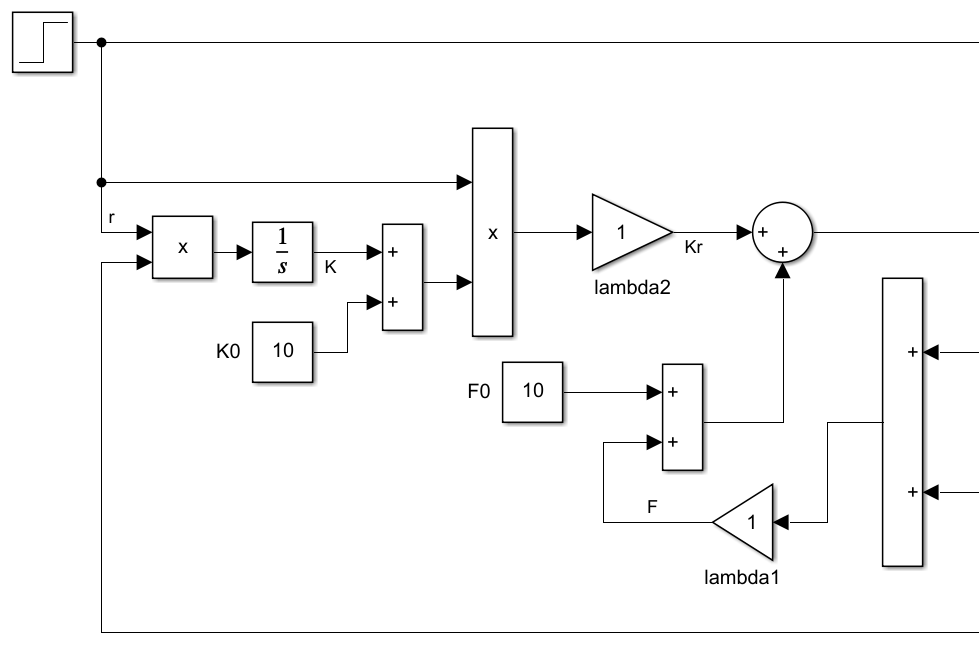
搭建simulink仿真模型为
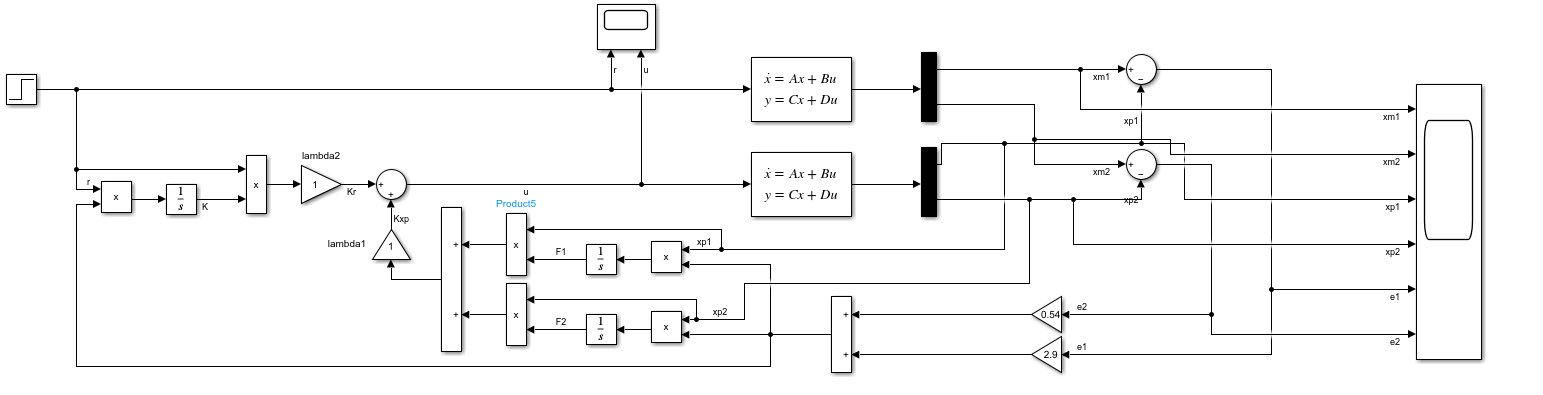
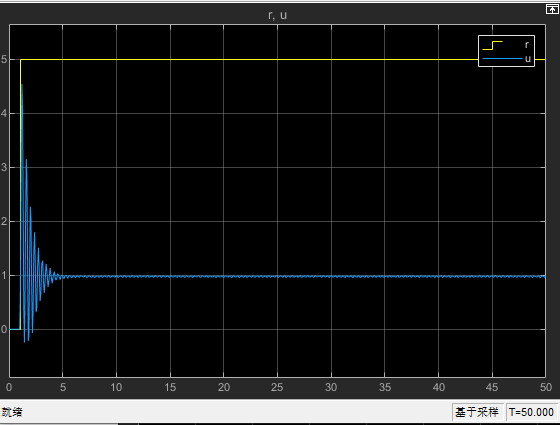
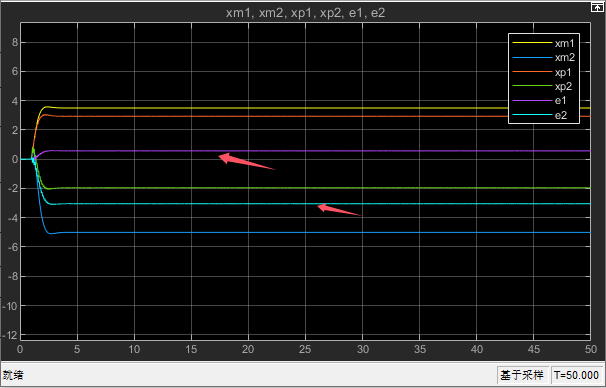
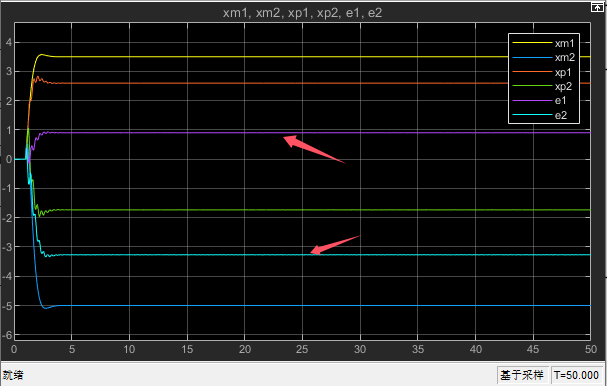
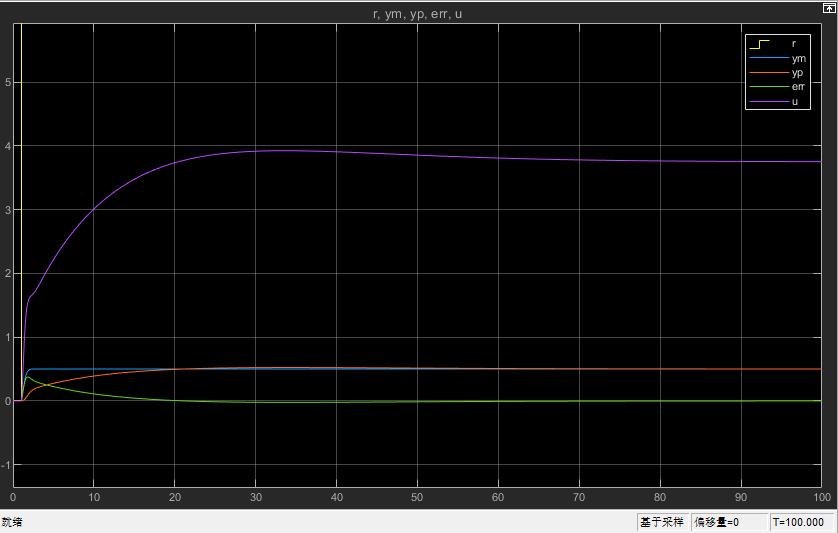
当时,看一下跟踪效果

可以看到箭头所指的两条误差曲线并没有收敛到0。
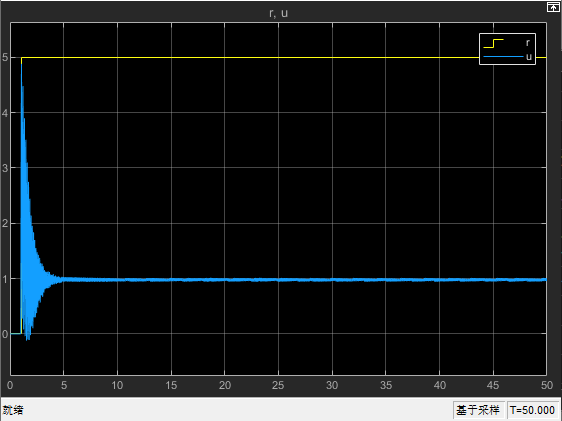
此时,对应的输入为
下面将探讨是哪一个因素影响误差:
我们来调整一下
可以看到误差最后收敛的数值没有改变。
可以看到,改变并不能使误差收敛到0,反而误差收敛到具体的数值与其无关,这两个参数只会影响到系统的输入,即影响系统收敛的速度。
我们从前馈矩阵和反馈矩阵的自适应率来看:
除了两个参数外(
已经是固定的),还应该注意到矩阵
和初值。
(1)我们前面在求解时,是令,然后求解得到
。
在该题中,即对应到数字2.9和0.54
这里不再重新取的值,求
,然后重新计算一遍,这里直接更改两个数字,为了方便起见,令两个数字分别为
,
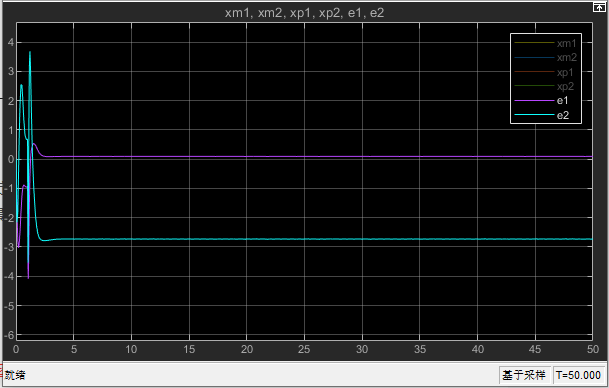
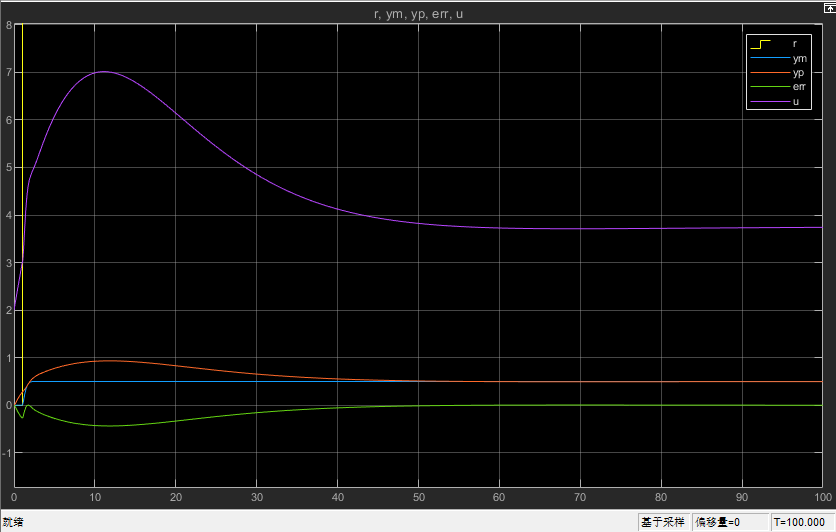
当时,
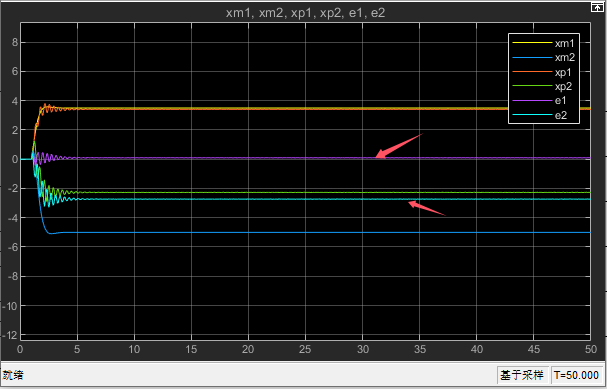
可以看到误差已经趋近于0, 误差
也有所减小。
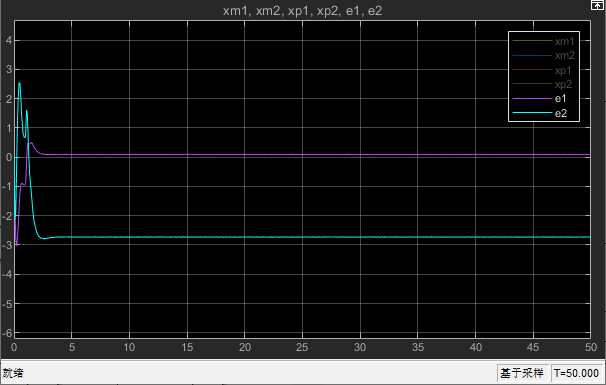
当时,
可以看到两个误差反而增大了。可以得到,合理的选择矩阵可以使系统误差稳态值变小。
(2)在前提下,改变初值为10,如图
误差波形为:
改变初值为
发现,在这个自适应率调节下,初值不影响误差的收敛值,但会影响到系统最初的输入
。
总结:从上可以看出,基于李雅普诺夫稳定性设计的MRACS收敛速度与权重有关,但最终误差收敛到多少与其无关。其次,矩阵
影响到误差最终的稳态值,要想误差趋于0,需要合理选择矩阵
。
2.2 输入输出形式
2.2.1 理论推导
这里以微分方程为例(但面对传递函数时,可以将传递函数转为微分方程),设被控对象于与参考模型的微分方程分别为
定义广义误差
可得误差的微分方程为
其中,
根据误差的微分方程
令
其中,
将误差的微分方程写为状态方程为
其中,
选取李雅普诺夫函数,
这里与前面选取准则一样,想要广义状态误差趋于0的同时,还希望被控对象的参数与参考模型的参数尽量一致,即
趋于0
这里对于李雅普诺夫函数也可以用前一节的李雅普诺夫函数形式,即
然后利用前一节推导的结论。
这里采用下列的形式就行推导,李雅普诺夫函数为
其中,为对称正定矩阵,
为对角正定矩阵,即
求导可得,
令
可得,
2.2.2 例题
这里以二阶系统为例,
参考模型微分方程为:
被控对象微分方程为:
其中,输入为
将其带入被控对象微分方程为
令可得,
定义广义误差
可得,
令,可得
令
将误差的微分方程写为状态方程为
其中,
选取李雅普诺夫函数,
李雅普诺夫函数为
其中,为对称正定矩阵,
为对角正定矩阵,即
求导可得,
令
可得自适应率为,
由可得
由可得
其中,当对象参数缓慢变化时,
可得,
可得自适应规律为
假设参考对象模型为
被控对象模型为
引入前馈和反馈
,由对象模型可得,
系统矩阵 ,由
,可得
带入自适应规律可得,
令,
搭建simulink如下,
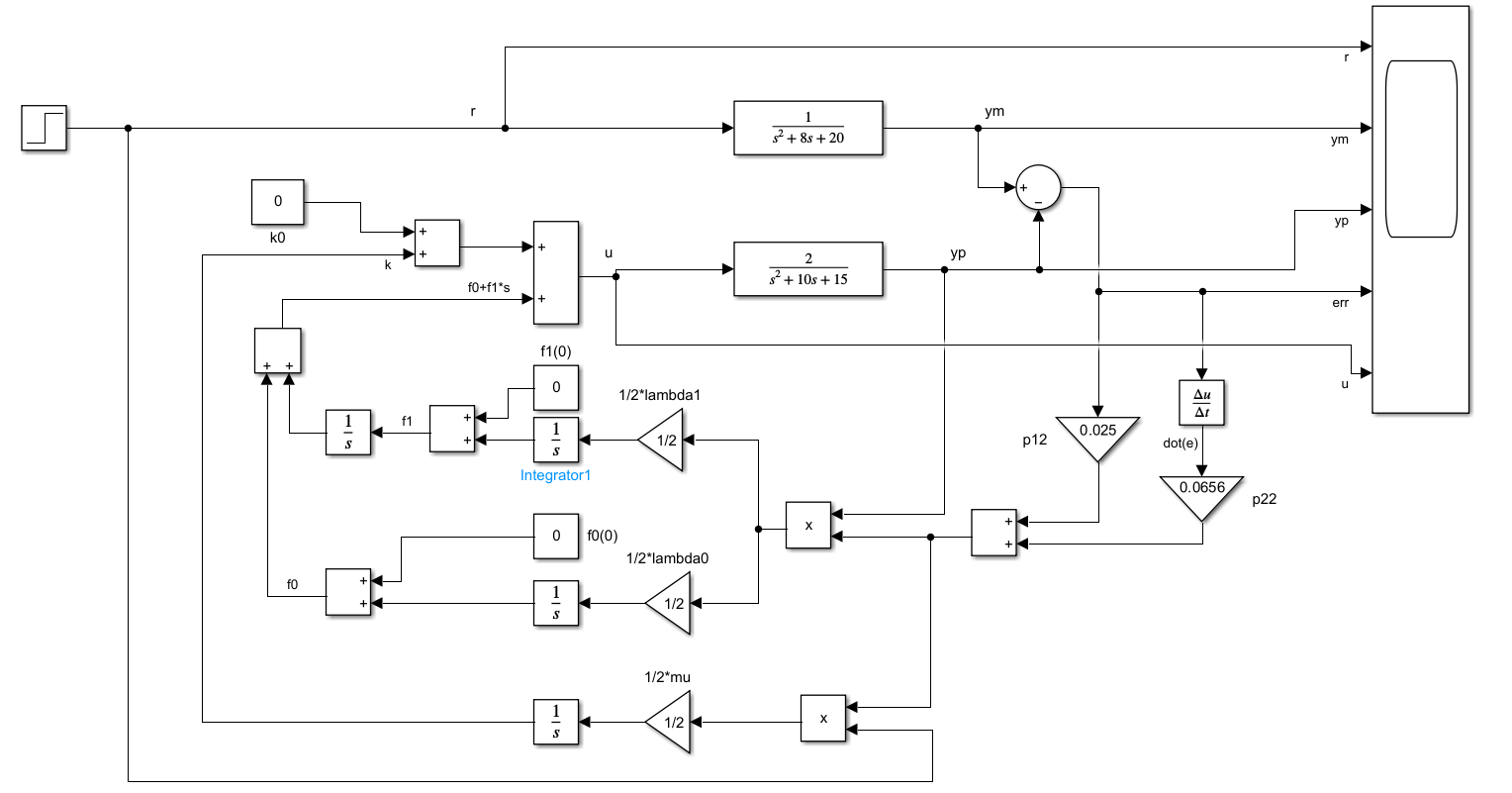
结果如下
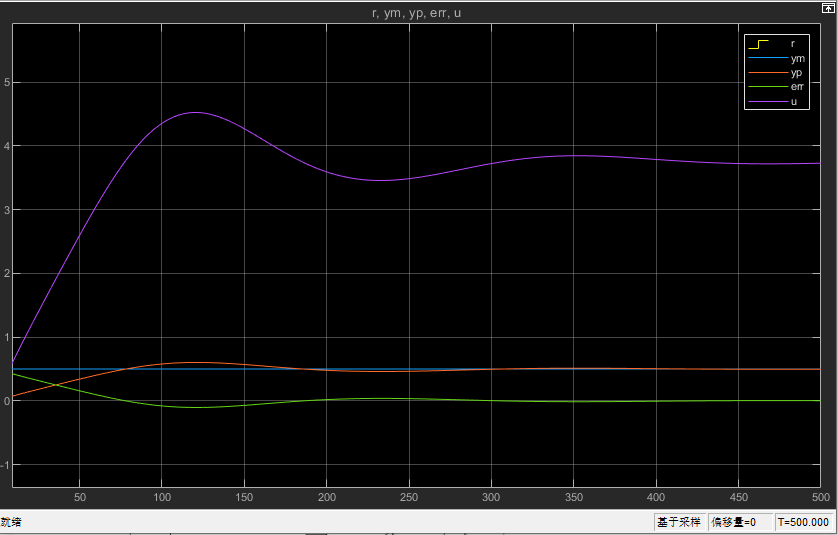 可以看到误差最终趋于0,但是收敛速度太慢。
可以看到误差最终趋于0,但是收敛速度太慢。
调整权重,误差收敛更慢,这是因为其在自适应率中处于分母上,故权重越大,效果越不明显。
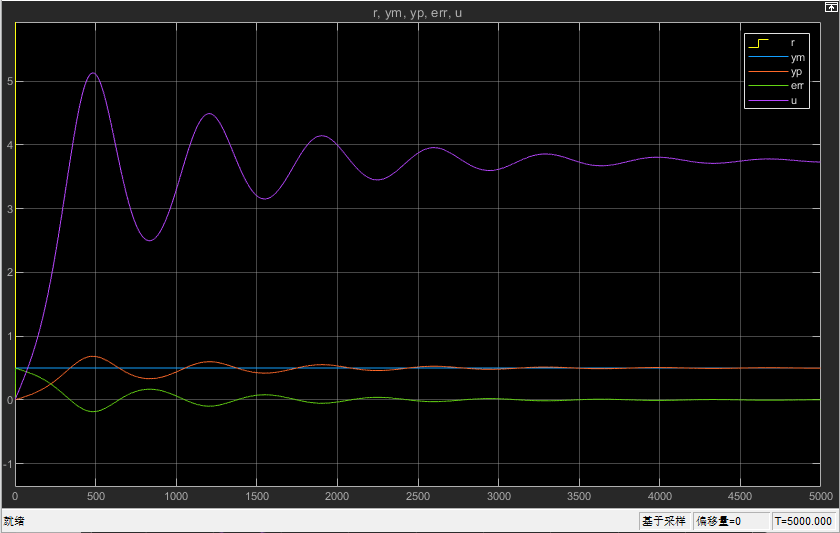
调整权重为
可以看到系统收敛速度变快。
在权重为的前提下,调整
可以看到,通过给定一个适当的初值,可以使得系统有更快的响应速度。
3、总结
通过上面两个例题,可以看到,选择不同的李雅普诺夫函数得到的自适应率是不同的,且其中的参数发挥的作用也是不一样的,有的参数影响收敛速度,有的影响最终误差的稳态值。
从基于输入输出形式的自适应率设计(例题2)可以看到,自适应率与误差的导数有关,这就导致自适应系统的抗干扰能力降低,为了避免这一缺点,Narendra提出了稳定自适应控制器方案。下一篇将介绍Narendra稳定自适应控制器方案。

















 988
988

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









