







一、安装VScode
不建议从software安装,vscode是阉割版本,不能添加中文注释
更新软件包索引并安装依赖软件
sudo apt update sudo apt install software-properties-common apt-transport-https wget使用命令插入Microsoft GPG key
wget -q https://packages.microsoft.com/keys/microsoft.asc -O- | sudo apt-key add -启动vscode源仓库,输入
sudo add-apt-repository "deb [arch=amd64] https://packages.microsoft.com/repos/vscode stable main"apt软件源被启动,安装vscode软件包
sudo apt install code当新版本发布时更新升级安装包
sudo apt update
sudo apt upgrade二、配置VScode环境
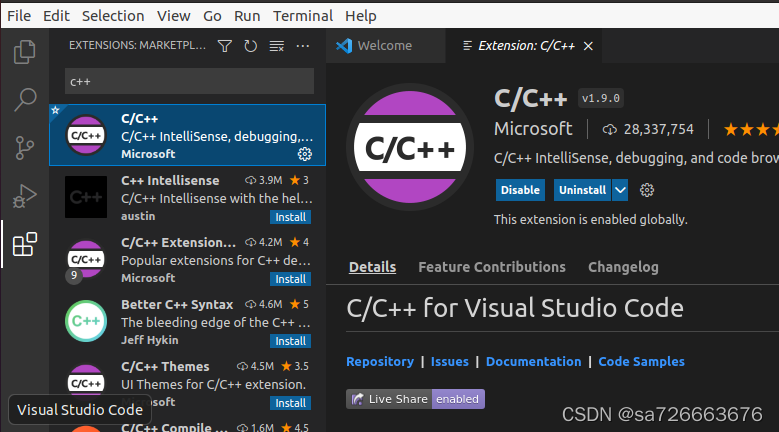
1.打开VScode,点开Extensions,搜索C++插件点击安装
2.在任意目录下建立新文件夹(VScode通过文件夹管理工程文件),例我直接在桌面建立
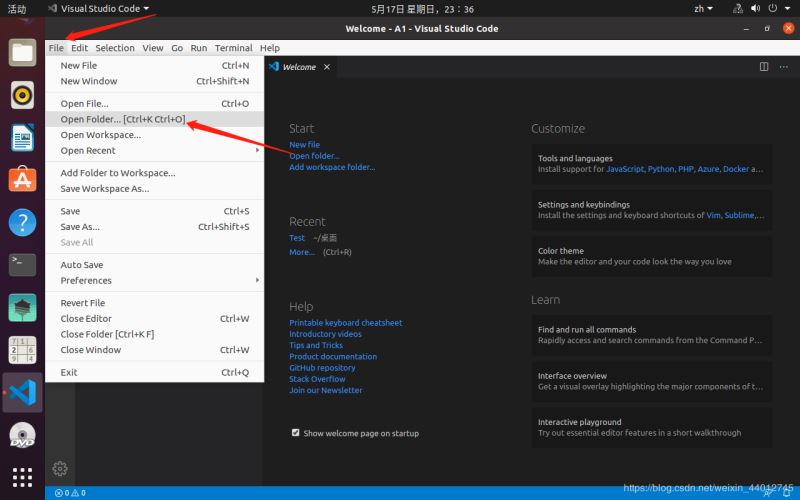
3.在VScode中打开该文件夹
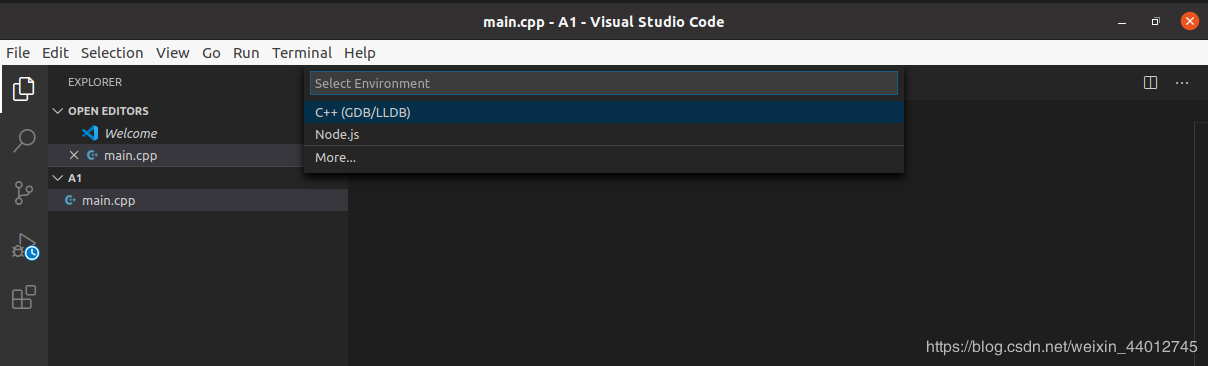
4.在其中建立新文件main.cpp,打开main.cpp,按F5或者点击Run->Starting Debugging,弹出选择环境的框框,选择c++,选择配置则选择第一个g++(大概无所谓吧,反正后面修改配置文件直接全部替换掉)
5.上一步之后将自动生成launch.json,若没出现,则再次点击F5。打开launch.json,将默认生成的文件全部替换为如下:
{
// Use IntelliSense to learn about possible attributes.
// Hover to view descriptions of existing attributes.
// For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387
"version": "0.2.0",
"configurations": [
{
"name": "(gdb) Launch",
"type": "cppdbg",
"request": "launch",
"program": "${workspaceFolder}/${fileBasenameNoExtension}.out",
"args": [],
"stopAtEntry": false,
"cwd": "${workspaceFolder}",
"environment": [],
"externalConsole": true,
"MIMode": "gdb",
"preLaunchTask": "build",
"setupCommands": [
{
"description": "Enable pretty-printing for gdb",
"text": "-enable-pretty-printing",
"ignoreFailures": true
}
]
}
]
}6.修改完launch.json文件后,再次按F5,这次将会出现提示:
“No task to run found. configure tasks...”
然后依次选择
Create tasks.json file from template
Others Example to run an arbitrary external command.
打开task.json后,将其默认生成文件全部替换为如下:
{
// See https://go.microsoft.com/fwlink/?LinkId=733558
// for the documentation about the tasks.json format
"version": "2.0.0",
"tasks": [
{
"label": "build",
"type": "shell",
"command": "g++",
"args": ["-g", "${file}", "-std=c++11", "-o", "${fileBasenameNoExtension}.out"]
}
]
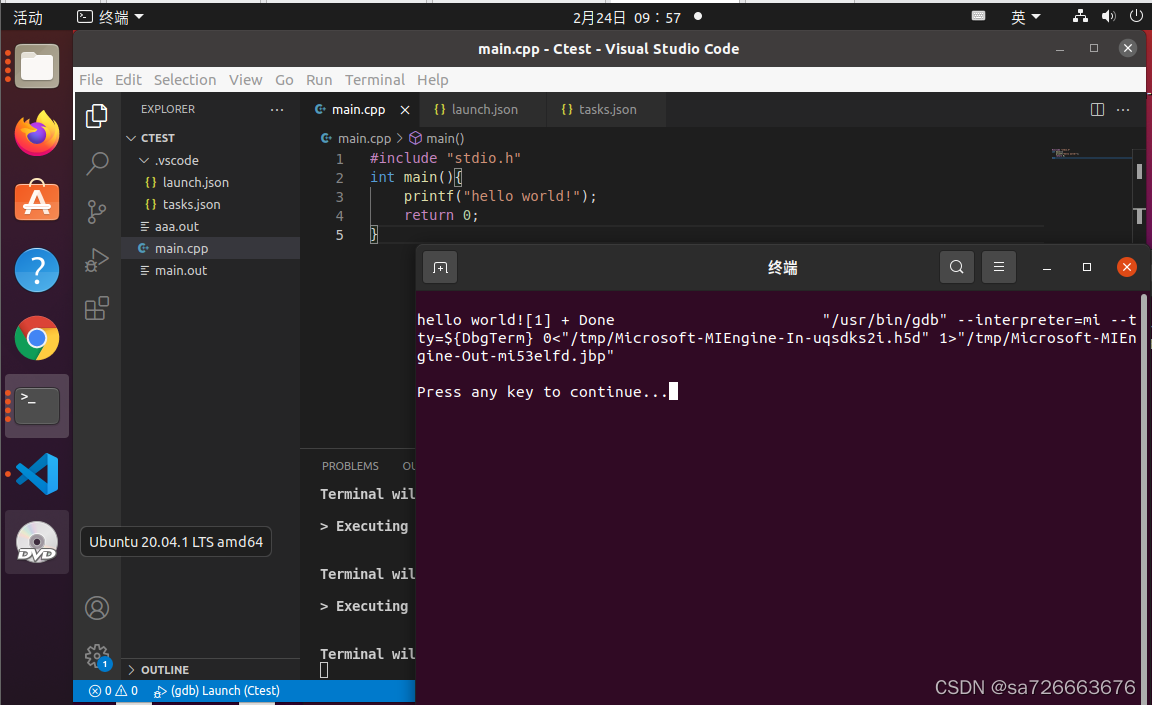
}三、完成配置,Hello world!
按下F5,输出“Hello world”将在终端中显示,至此完成配置工作!
四、vscode打开工作空间
打开vscode安装CMake Tools和ROS插件。
ctrl+alt+t打开终端,输入:
cd ~/catkin_wscode .(code和.之间有空格)
便会自动打开vscode
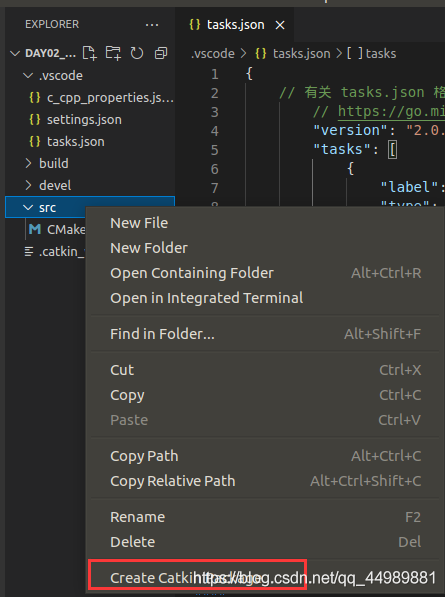
五、创建ROS功能包
选定 src 右击 —> create catkin package
设置包名
设置完包名后,按下回车,需要继续设置依赖
添加依赖
roscpp rospy std_msgs
依赖添加成功后,会自动生成功能包所需要的相关文件。
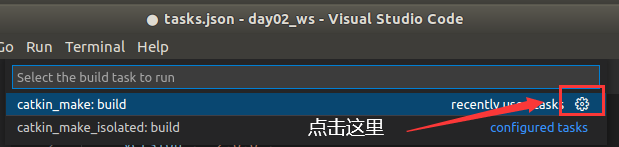
用快捷键 ctrl + shift + B 调用编译选项配置
选择: catkin_make:build















 953
953











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









