






 本文详述了下肢外骨骼(LEE)的平衡与稳定性控制,包括基于ZMP、CoM和CoP的分析及策略。重点讨论了ZMP在步态稳定性中的作用,以及髋关节和踝关节策略在平衡恢复中的应用。还介绍了Lyapunov稳定性方法和其他稳定保证技术,并展望了研究挑战和未来发展方向。
本文详述了下肢外骨骼(LEE)的平衡与稳定性控制,包括基于ZMP、CoM和CoP的分析及策略。重点讨论了ZMP在步态稳定性中的作用,以及髋关节和踝关节策略在平衡恢复中的应用。还介绍了Lyapunov稳定性方法和其他稳定保证技术,并展望了研究挑战和未来发展方向。
目录
准备部分
名词介绍:
LEE:下肢外骨骼.
AP方向:anterior posterior前后方向.
IP:倒立摆.
HAA:动力髋关节内收肌
研究重点:
动态静态平衡、防止跌倒、控制器稳定性、平稳的人-外骨骼交互.
文章主要介绍:
下降识别(疑问)、平衡恢复、稳定性保证策略.
在平衡和稳定方面主要采用:
零力矩点(ZMP)、质心(CoM)、外推质心(XcoM).
制定耦合LEE和用户的静态或动态稳定条件:
零力矩点(ZMP)、质心(CoM)、外推质心(XcoM)、压力中心(CoP)、地面反应力 (GRF)和稳定边缘(SM)之间的各种关系.其他方法还有:H、积分导纳整形、
Tikhono夫定理和最小二乘逻辑
控制器稳定标准:
Lyapunov定理.
估计步态稳定性的方法:
最大弗洛凯乘数、变异性度量、远程相关性、足部放置估计器、稳定和不稳定力、最大允许扰动和步态灵敏度范数.
稳定性恢复策略:
髋关节策略、踝关节策略、步骤策略、下蹲策略.其中髋关节和脚踝的站立策略占主导地位.
其他文章:
①髋关节辅助非对称完全约束平行机构原型的设计。该原型有三个驱动器和三个旋转自由度。为了避免传统RRR-腿的缺点,使用受电弓作为三旋转约束的腿;
②基于遗传算法的优化自适应踝关节外骨骼。采用了一种新型的具有非线性弹簧的致密可变刚度SEA,克服了传统串联弹性执行器(SEA)的局限性,该SEA可以被动地改变弹簧刚度随输出负载的函数变化。
---------------------------------------------------------------------------------------------------------------------------------
人类的步态被定义为一个动态平衡的过程,它包括在整个周期中的静态不平衡阶段。耦合LEE机制的轨迹取决于两种稳定性标准:静态稳定性和动态稳定性。
静态稳定性限制了耦合LEE的CoM的垂直投影到支撑多边形的内部。静态稳定性导致步态缓慢和大脚的LEEs。
动态稳定性比静态稳定性提供了更多的自由度,因为耦合LEE的投影CoM可能会离开支撑多边形,从而允许更快的步态。
在LEE中,识别跌倒和平衡恢复的能力对于确认佩戴者的安全性非常重要,特别是对于平衡能力较弱的个人来说。然而,许多外骨骼已经达到了提供动态稳定性的预期目标。
---------------------------------------------------------------------------------------------------------------------------------
其他针对LEE不同角度进行综述
卒中后康复训练--对LEE的训练范式、驾驶模式和控制策略进行了比较、分类和设计总结;
康复训练最先进技术总结--评估了人类步态分析的研究进展,并对LEE康复机器人在控制和机械方面的进展进行了逻辑回顾;
根据非医疗和医疗目的申请分类的LEE的审查--根据控制策略、执行器、机构、传感器、供电方法和材料等重大问题,对所评价的LEE进行了比较。讨论了非医疗和医疗LEE的安全规范和标准化的必要性。这包括国际安全要求。当前只有少数LEEs实现了完全稳定-即不需要拐杖辅助支撑。
近年来LEE研究的共同趋势--传感器、执行器、能源、控制策略和材料;
LEE的设计和开发的最新问题。
---------------------------------------------------------------------------------------------------------------------------------
本文重点
综述了在LEE的设计和开发中包含静态和动态平衡、跌倒识别、跌倒预防、平衡恢复和稳定保证策略的研究进展。
主要研究了LEE的平衡和稳定性的控制策略。虽然机械结构和执行机构为LEE的平衡和稳定性提供了基础,但这并不是本文的重点。
概述了用于确保耦合LEE和佩戴者的稳定性的概念。
讨论了该研究领域所面临的挑战和未来的发展趋势。
总结如下:
综述了在设计和应用中包含下降识别、平衡恢复和稳定性保证策略的研究进展;
开放研究挑战,研究领域的概述和未来的平衡和稳定性问题趋势LEE强调容易识别;
研究人员可以使用这篇审查作为起点进一步开发和探索其他方法,确保LEE用户的安全。
关键词:外骨骼平衡稳定性(Exoskeleton balance stability);下降识别(falling recongnition);平衡;lyapunov;质心;压力心;零力矩点;稳定性裕度
---------------------------------------------------------------------------------------------------------------------------------
使用ZMP标准进行步态稳定性分析
LEE控制目的:使支撑腿或摆动腿(上半身或摆动脚)的末端遵循所需的轨迹(该轨迹一般由佩戴者通过传感器产生);
LEE用途:功率增强;或者从步态规划中获得所需轨迹,LEE在耦合人类-外骨骼有积极作用,协助肌肉障碍个体的运动;
ZMP定义:地面平面上由于地面接触引起的总力矩在平面中变为零的点;
SM:ZMP与稳定区域边界间的最小距离。
基于ZMP的轨迹规划
LEE的步态规划生成方式:基于ZMP标准(主要方式);人体动作捕捉;能量消耗。在ZMP步态规划中,主要有两种方式:①是基于倒立法.使用动力学方程的部分知识,如CoM位置、角动量和;②是需要动力学方程的精确知识,如CoM的LEE各部分位置、质量和惯性,依赖于模型的精确性。
以方法②为例,
首先,规划了踝关节和髋关节的运动轨迹。
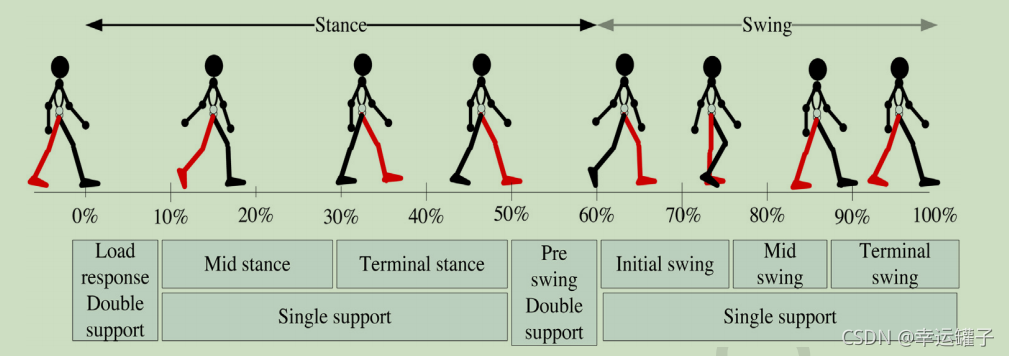
随后,通过逆运动学计算其他分量的轨迹。完整行走分为四个阶段,即负荷响应双支撑,第一个单支撑腿(细分为中间和末端站立),预摆动的双支撑和第二单腿其他支撑(细分为初始、中间和末端摆动)。如图所示,在双支撑阶段,双脚都与地面有接触。这个阶段从前脚后跟触地开始,到后脚后跟脚趾头离地前结束。支撑腿保持静止,而另一条腿在单支撑阶段向前摆动。一些步态规划研究假设双支持相是瞬时。然而,在这种情况下,臀部必须移动得更快。这是因为,为了保持行走的稳定性,CoG(在静态稳定的情况下)或ZMP(在动态稳定的情况下)必须在一小段时间内从后脚移动到前脚。如果双支撑时间过长,LEE不能高速行走。双支撑期约为整个步行期的20%。该值可用于步态规划的计算。(流浪者公司专门为截瘫患者开发完整的LEE,称作ATALANTE)
目前,大多数稳定性控制方法都是为了在行走过程中将ZMP保持在支撑多边形内。这些策略在类人机器人的行走稳定性控制中非常有效。由于ZMP在人类步态阶段并不经常在支持多边形中。人类的行走利用这种不稳定性来节能和加快运动。在[45]中提出了一种保持人类ZMP和外骨骼ZMP一致性的功率增强LEE控制方法。该控制方法在保持行走稳定性的同时,减少了对人体-外骨骼的干扰。
利用ZMP和CoG概念为LEE设计了一种人合作控制方法,帮助[61]爬楼梯。[62,63]研究了矢状面LEE垂直化(坐立运动)问题。为了确保系统保持垂直平衡,ZMP被用来生成广义坐标所需的轨迹。
基于ZMP的LEE平衡控制的实际实现
ZMP准则可用于离线生成平衡姿态(即关节轨迹)的设定点。生成的设定点被用作LEE所需的姿态。
传感器(加载单元)被放置在脚部的战略位置,在LEE的每只脚上形成一个力板。这些传感器用于感知地面接触点(GCP),用来实时确定近似ZMP。
然后将参考ZMP与GCP数据进行比较。该控制器被设计为基于负载单元确定的姿势平衡来调节改变的设定点。在x-z平面上,GCP和ZMP之间的差异可以作为控制器的输入。来自控制器的输出可以作为关节的补偿角度,从而使实际的ZMP可以位于支撑区域的凸壳中。编码器可用于感知关节的位置。
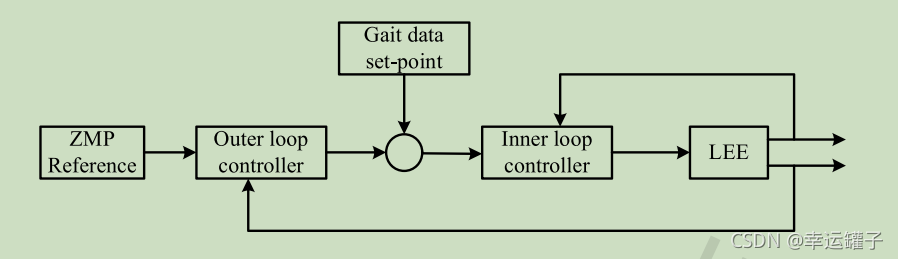
基于ZMP的LEE平衡控制的简单框图如图2所示。内外控制器分别设计用于关节位置控制和平衡控制。ZMP参考轨迹可以通过外部控制器根据力板找到的GCP数据跟踪ZMP参考轨迹,以平衡LEE。
基于CoM和CoP的平衡恢复控制设计
CoP平衡方法一般是踝关节扭矩和足部放置用于AP方向,或足部在矢状面的放置。
双支撑相结束时的CoP与前一摆动阶段结束时的CoM速度呈线性相关。CoP对应于在矢状面视角上的静态姿势的CoM的地面投影,并在安静站立时位于踝关节的一点前方。平衡控制的另一个重要变量是足部放置的时间,但它更难预测。
髋关节策略或踝关节策略,或它们的组合被人类使用来适应冠状体在矢状面中的水平位置的变化。众所周知,研究人员正在使用一个倒立摆(IP)来分析和验证这些姿势平衡。这是基于CoM和CoP与CoM水平加速度的分析关系。
在髋关节策略中,CoM通过移动身体与髋关节和踝关节相反。
在踝关节策略中,CoM通过像IP一样移动整个身体来移动。
髋关节和踝关节联合策略同时采用髋关节和踝关节策略。
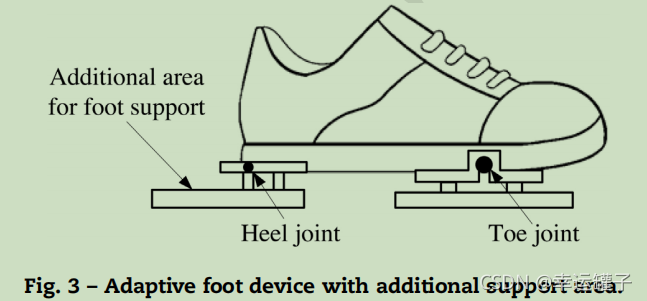
无论采用何种策略来改变CoM,它都可以看作是姿势或步态失真。与干扰恢复不同的是,在背包加载(backpack loading)由于持续加载的情况下,变形是持续的。这种扭曲可能不容易被纠正。需要提供额外的支持区域以容纳CoP,如图3所示.
一些新的稳定性系统
①基于 对CoM稳定性和SM的评价,发表了一种新的生态方法--APO(主动骨骨矫正),即在APO感觉到不平衡情况的迹象,它会在臀部提供平衡扭矩,以帮助恢复平衡。
②一种新的自适应足系统(附加装置),以提高LEE的稳定性。脚后跟后的支撑区域在行走时会自动延伸。系统的支撑面积增加,避免摆动时与水平地面碰撞。这是基于这样一个事实,即系统被动地伸展在站立和收缩在脚趾摇杆阶段。所提出的系统不需要驱动功率。整个概念是基于CoM和CoP之间的关系。
③在[78]中报道了应用于LEE的平衡稳定性技术,称为Minav2。所提出的平衡稳定策略是基于CoM和联合空间动力学。平衡稳定性分析是基于建立的人体外骨骼系统矢状面的等效力学模型。利用双腿和单腿的稳定性边界分析了Minav2的平坦地面稳定性性能。
④在[81]中提出了基于本体CoM相对于CoP的倾斜角和倾斜角变化率的LEE平衡控制算法。利用CoM的运动计算了运动所需的机械能。利用该遗传算法优化了基于CoM的[82]中STS转换的关节角度参考轨迹的生成。CoP被纳入[83]的控制环,以改善行走的平衡。
XCoM、HAA和基于步宽自适应算法的平衡恢复控制设计
动力髋关节内收肌(HAA)也可用于自我平衡行走。这是基于一个在线步宽自适应算法(SWAA)。SWAA是基于XCoM的概念而设计的。XCoM关于提高步态稳定性的概念已在各种研究中被有效地应用于。在动态和静态条件下,使用XCoM都可以表示其稳定性条件。站立位置静态稳定的突出条件是CoM的垂直投影应在支撑区域内。这是基于IP模型的。另一方面,动态稳定性的条件是,CoM的垂直投影位置加上其速度时间一个因子,应在支撑区域内。这个向量的量被称为XCoM。XCoM的一个很好的特点是,它合并了关于当前CoM的运动学数据的信息,以预测CoM将接触支持边界的未来一段时间。在XCoM的想法中,双脚步态的单个站立阶段可以被建模为一个IP。
Lyapunov稳定性方法
稳定性概念的主要目的是在不严格计算其轨迹解的情况下,得出关于给定系统的行为的决定。利用李亚普诺夫函数研究了系统平衡点的稳定性。保证稳定性的李亚普诺夫标准是用于确认控制器、开关和人-外骨骼相互作用的稳定性的主要技术。在李亚普诺夫理论中,有两个主要方向:使用李亚普诺夫函数或重新表述李亚普诺夫意义上的稳定性定义,然后使用类似的方法对线性/非线性控制证明其稳定性。
①在[22]中研究了LEE存在额外干扰下的轨迹跟踪任务和人-外骨骼相互作用。这是基于两种控制方法。第一种是由纯人工神经网络(ANN)和组合误差因子,通过增强瞬态响应来提高佩戴者的安全性。第二种方法包括重复学习控制和神经网络。用与[89]的方法相同的李亚普诺夫方法彻底验证了该控制器的稳定性。
待补充项---

















 3795
3795

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









