







既上一篇文章对I2C的理论分析、讲解。基本原理已经大致了解了。本文就以I2C在stm32上的系统框架图的分析、讲解和对I2C的代码配置。
基于平台:STM32F407ZG
参考资料:STM32f4参考手册、STM32f4数据手册、I2C参考手册
I2C的系统框架
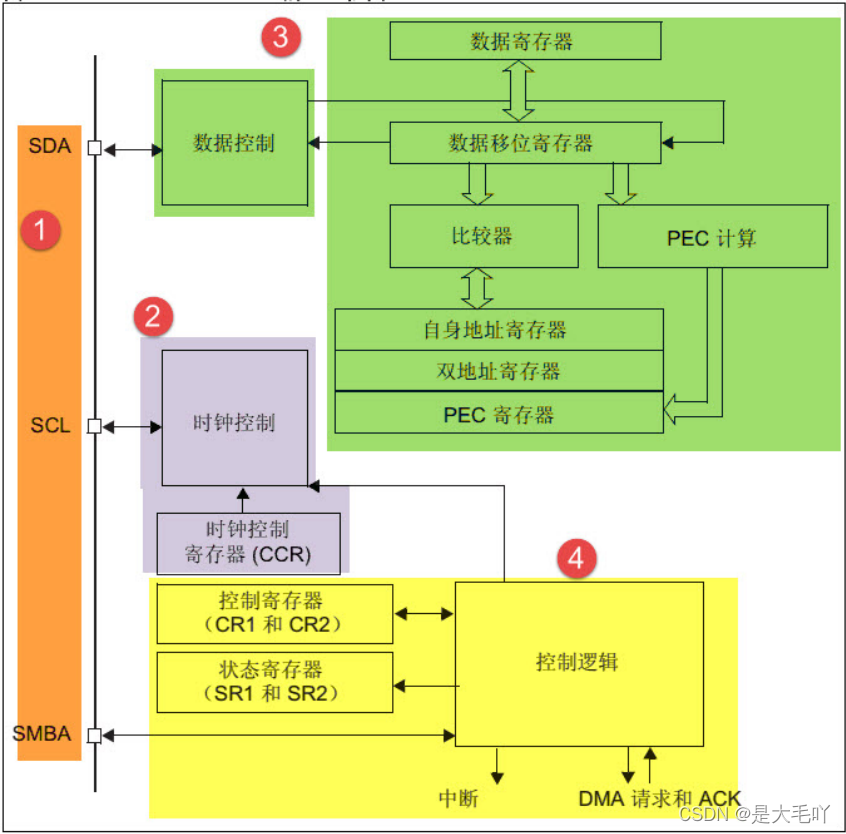
本文对I2C系统框架图分解成四部分:
●通讯引脚
●时钟控制逻辑
●数据控制逻辑
●整体控制逻辑
1、通讯引脚
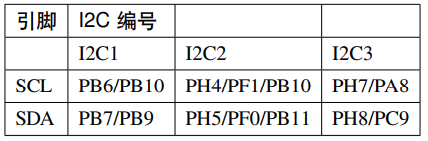
在框架图中我们看到主要有三个引脚,分别是SDA、SCL、SMBA。最主要的通信引脚主要是SDA、SCL引脚。I2C的所有硬件架构都是根据SCL线和 SDA线展开的,其中SMBA我们很少用到SMBA线主要用于SMBUS的
警告信号,I2C通讯没有使用到。在数据手册上我们得出I2C在STM32F407上的通信引脚:
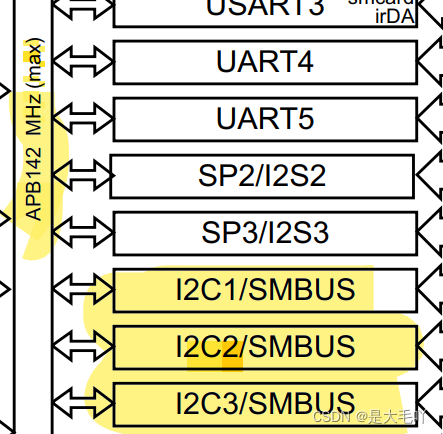
2、时钟控制逻辑
我们可以按照这个名字就可以知道这个主要就是用于控制时钟的的。在我们的数据手册上查阅我们知道三个I2C都挂载在APB1的时钟上。即:
另外在框架图我们还发现I2C接口根据时钟控制寄存器 (CCR) 控制,在查阅参考手册我们知道这个寄存器主要控制的参数主要为时钟频率。并且知道可以通过这个寄存器配置I2C的两种模式。即“快速模式”、“标准模式”。这两个模式分别I2C对应100/400Kbit/s 的通讯速率。
• 在快速模式下可选择SCL时钟的占空比,可选Tlow/Thigh=2或者Tlow/Thigh=16/9 模式,我们知道I2C协议在 SCL 高电平时对 SDA 信号采样,SCL 低电平时 SDA 准备下一个数据,修改 SCL 的高低电平比会影响数据采样,但其实这两个模式的比例差别并不大,若不是要求非常严格,这里随便选就可以了。
3、数据控制逻辑
这里主要是控制I2C上的SDA。I2C 的SDA信号主要连接到数据移位寄存器上,数据移位寄存器的数据来源及目标是数据寄存器 (DR)、地址寄存器 (OAR)、PEC 寄存器以及 SDA 数据线。当向外发送数据的时候,数据移位
寄存器以“数据寄存器”为数据源,把数据一位一位地通过 SDA 信号线发送出去;当从外部接收数据的时候,数据移位寄存器把 SDA 信号线采样到的数据一位一位地存储到“数据寄存器”中。若使能了数据校验,接收到的数据会经过 PCE 计算器运算,运算结果存储在“PEC 寄存器”中。当 STM32 的 I2C 工作在从机模式的时候,接收到设备地址信号时,数据移位寄存器会把接收到
的地址与 STM32 的自身的“I2C 地址寄存器”的值作比较,以便响应主机的寻址。STM32 的自身 I2C 地址可通过修改“自身地址寄存器”修改,支持同时使用两个 I2C 设备地址,两个地址分别存储在 OAR1 和 OAR2 中。
4、整体控制逻辑
根据名字我们就要可以知道这里是主要整体控制逻辑负责协调整个I2C外设,控制逻辑的工作模式根据我们配置的“控制寄存器(CR1/CR2)”的参数而改变。在外设工作时,控制逻辑会根据外设的工作状态修改“状态寄存器 (SR1 和 SR2)”,我们只要读取这些寄存器相关的寄存器位,就可以了解 I2C 的工作状态了。除此之外,控制逻辑还根据要求,负责控制产生 I2C 中断信号、DMA 请求及各种 I2C 的通讯信号(起始、停止、响应信号等)。
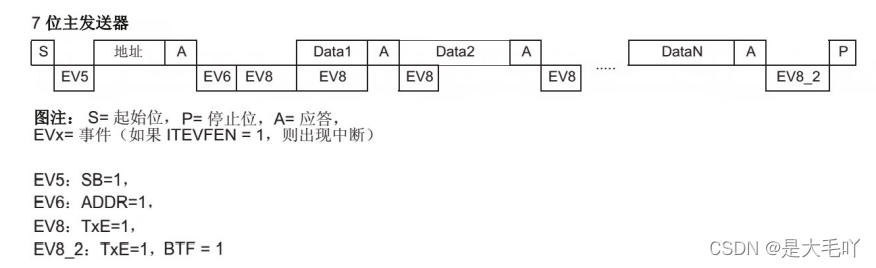
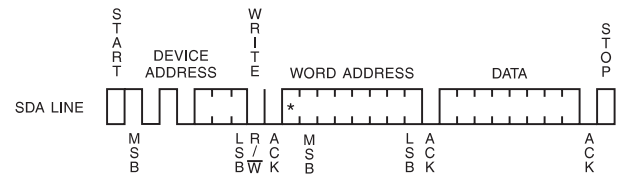
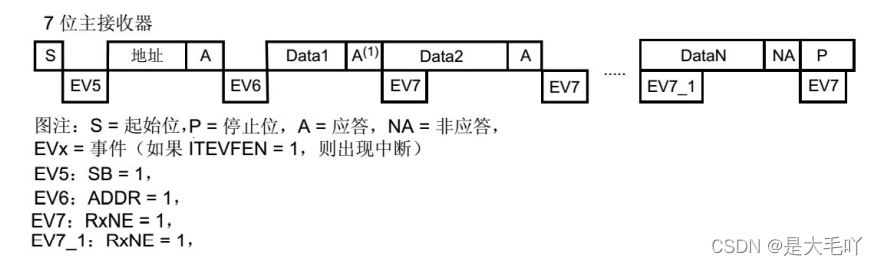
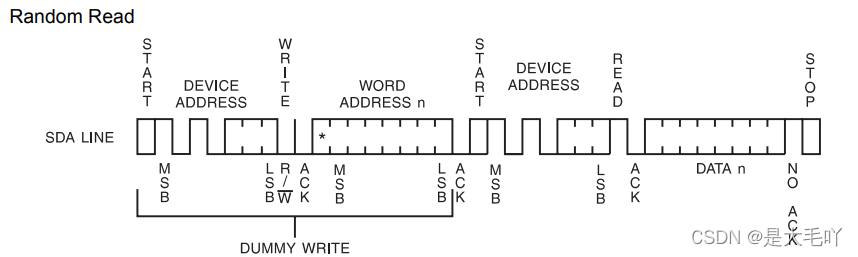
通信过程
写入和读取的过程都是与I2C协议层一致的,不过这里的主要是来控制I2C的寄存器来达到读取和写入的目的的。这里两个图解也是主要硬件配置I2C的主要过程。
写入过程
读取过程
I2C代码配置
在硬件连接上大多都用到AT24C02芯片。即:

I2C的初始化结构体
typedef struct
{
uint32_t I2C_ClockSpeed; /*!< Specifies the clock frequency.
This parameter must be set to a value lower than 400kHz */
uint16_t I2C_Mode; /*!< Specifies the I2C mode.
This parameter can be a value of @ref I2C_mode */
uint16_t I2C_DutyCycle; /*!< Specifies the I2C fast mode duty cycle.
This parameter can be a value of @ref I2C_duty_cycle_in_fast_mode */
uint16_t I2C_OwnAddress1; /*!< Specifies the first device own address.
This parameter can be a 7-bit or 10-bit address. */
uint16_t I2C_Ack; /*!< Enables or disables the acknowledgement.
This parameter can be a value of @ref I2C_acknowledgement */
uint16_t I2C_AcknowledgedAddress; /*!< Specifies if 7-bit or 10-bit address is acknowledged.
This parameter can be a value of @ref I2C_acknowledged_address */
}I2C_InitTypeDef;
这里面的结构体成员有六个。分别是:
①I2C_ClockSpeed:这个主要是设置SCL的时钟频率。我们知道I2C分为两种模式。标准和快速两种模式。频率为100/400khz。因此在配置这个值的时候不能超过400000。
②I2C_Mode:这个成员主要是配置I2C的工作模式。可选I2C模式和SMBUS模式。一般情况下我们多选I2C模式。
③I2C_DutyCycle:这个成员设置的是I2C的SCL线时钟的占空比。主要有两种模式,但其实选哪种都没有多大的影响。
④I2C_OwnAddress1:这个成员主要设置的是I2C设备的地址。地址可设置为7位或10位。
⑤I2C_Ack:这个成员主要是配置I2C的应答位。分为应答和非应答,一般大多情况下设置为应答。
⑥I2C_AcknowledgeAddress:这个成员配置选择I2C的寻址模式是7位还是10位地址。这需要根据实际连接到I2C总线上设备的地址进行选择,这个成员的配置也影响到I2C_OwnAddress1成员,只有这里设置成 10 位模式时,I2C_OwnAddress1才支持10位地址。
几个重要的函数
I2C_GenerateSTART(); //产生起止信号
I2C_CheckEvent(); //检测EVx事件
I2C_Send7bitAddress(); //发送设备地址
I2C_SendData(); //发送数据
I2C_GenerateSTOP(); //停止信号
.h文件
#include "stm32f4xx.h"
#define I2C_Speed 400000
/* STM32 自身的 I2C 地址,这个地址只要与 STM32 外挂的 I2C 器件地址不一样即可 */
#define I2C_OWN_ADDRESS7 0X0A
/*I2C 接口 */
#define EEPROM_I2C I2C1
#define EEPROM_I2C_CLK RCC_APB1Periph_I2C1
#define EEPROM_I2C_SCL_PIN GPIO_Pin_8
#define EEPROM_I2C_SCL_GPIO_PORT GPIOB
#define EEPROM_I2C_SCL_GPIO_CLK RCC_AHB1Periph_GPIOB
#define EEPROM_I2C_SCL_SOURCE GPIO_PinSource8
#define EEPROM_I2C_SCL_AF GPIO_AF_I2C1
#define EEPROM_I2C_SDA_PIN GPIO_Pin_9
#define EEPROM_I2C_SDA_GPIO_PORT GPIOB
#define EEPROM_I2C_SDA_GPIO_CLK RCC_AHB1Periph_GPIOB
#define EEPROM_I2C_SDA_SOURCE GPIO_PinSource9
#define EEPROM_I2C_SDA_AF GPIO_AF_I2C1
#define I2CT_FLAG_TIMEOUT ((uint32_t)0x1000)
#define I2CT_LONG_TIMEOUT ((uint32_t)(10 * I2CT_FLAG_TIMEOUT))
#define EEPROM_ADDRESS 0xa0
void I2C_GPIO_Config(void);
void I2C_Mode_Config(void);
void I2C_EE_Init(void);
uint32_t I2C_EE_ByteWrite(u8* pBuffer, u8 WriteAddr);
uint32_t I2C_TIMEOUT_UserCallback(uint8_t errorCode);
uint8_t I2C_EE_BufferRead(uint8_t* pBuffer, uint8_t ReadAddr,
u16 NumByteToRead);
初始化函数
void I2C_GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
/* 使能 I2C 外设时钟 */
RCC_APB1PeriphClockCmd(EEPROM_I2C_CLK, ENABLE);
/* 使能 I2C 引脚的 GPIO 时钟 */
RCC_AHB1PeriphClockCmd(EEPROM_I2C_SCL_GPIO_CLK |
EEPROM_I2C_SDA_GPIO_CLK, ENABLE);
/* 连接引脚源 PXx 到 I2C_SCL*/
GPIO_PinAFConfig(EEPROM_I2C_SCL_GPIO_PORT, EEPROM_I2C_SCL_SOURCE,
EEPROM_I2C_SCL_AF);
/* 连接引脚源 PXx 到 to I2C_SDA*/
GPIO_PinAFConfig(EEPROM_I2C_SDA_GPIO_PORT, EEPROM_I2C_SDA_SOURCE,
EEPROM_I2C_SDA_AF);
/* 配置 SCL 引脚 */
GPIO_InitStructure.GPIO_Pin = EEPROM_I2C_SCL_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(EEPROM_I2C_SCL_GPIO_PORT, &GPIO_InitStructure);
/* 配置 SDA 引脚 */
GPIO_InitStructure.GPIO_Pin = EEPROM_I2C_SDA_PIN;
GPIO_Init(EEPROM_I2C_SDA_GPIO_PORT, &GPIO_InitStructure);
}
模式配置
void I2C_Mode_Config(void)
{
I2C_InitTypeDef I2C_InitStructure;
/*I2C 模式 */
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
/* 占空比 */
I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
/*I2C 自身地址 */
I2C_InitStructure.I2C_OwnAddress1 =I2C_OWN_ADDRESS7;
/* 使能响应 */
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable ;
/* I2C 的寻址模式 */
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
/* 通信速率 */
I2C_InitStructure.I2C_ClockSpeed = I2C_Speed;
/* 写入配置 */
I2C_Init(EEPROM_I2C, &I2C_InitStructure);
/* 使能 I2C */
I2C_Cmd(EEPROM_I2C, ENABLE);
}
void I2C_EE_Init(void)
{
I2C_GPIO_Config();
I2C_Mode_Config();
}
串口打印数据函数
uint32_t I2C_TIMEOUT_UserCallback(uint8_t errorCode)
{
unsigned char ee_prom[20];
/* 使用串口 printf 输出错误信息,方便调试 */
sprintf((char *)ee_prom,"I2C 等待超时!errorCode = %d",errorCode);
usart_sendata(USART1,ee_prom);
return 0;
}
写一个字节到 I2C EEPROM
uint32_t I2C_EE_ByteWrite(u8* pBuffer, u8 WriteAddr)
{
/* 产生 I2C 起始信号 */
I2C_GenerateSTART(EEPROM_I2C, ENABLE);
/* 设置超时等待时间 */
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* 检测 EV5 事件并清除标志 */
while (!I2C_CheckEvent(EEPROM_I2C, I2C_EVENT_MASTER_MODE_SELECT))
{
if ((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(0);
}
/* 发送 EEPROM 设备地址 */
I2C_Send7bitAddress(EEPROM_I2C, EEPROM_ADDRESS,
I2C_Direction_Transmitter);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* 检测 EV6 事件并清除标志 */
while (!I2C_CheckEvent(EEPROM_I2C,
I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED))
{
if ((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(1);
}
/* 发送要写入的 EEPROM 内部地址 (即 EEPROM 内部存储器的地址) */
I2C_SendData(EEPROM_I2C, WriteAddr);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* 检测 EV8 事件并清除标志 */
while (!I2C_CheckEvent(EEPROM_I2C,
I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if ((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(2);
}
/* 发送一字节要写入的数据 */
I2C_SendData(EEPROM_I2C, *pBuffer);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* 检测 EV8 事件并清除标志 */
while (!I2C_CheckEvent(EEPROM_I2C,
I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if ((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(3);
}
/* 发送停止信号 */
I2C_GenerateSTOP(EEPROM_I2C, ENABLE);
return 1;
}
读取数据
/**
* @brief 从 EEPROM 里面读取一块数据
* @param pBuffer: 存放从 EEPROM 读取的数据的缓冲区指针
* @param ReadAddr: 接收数据的 EEPROM 的地址
* @param NumByteToRead: 要从 EEPROM 读取的字节数*/
uint8_t I2C_EE_BufferRead(uint8_t* pBuffer, uint8_t ReadAddr,
u16 NumByteToRead)
{
I2CTimeout = I2CT_LONG_TIMEOUT;
while (I2C_GetFlagStatus(EEPROM_I2C, I2C_FLAG_BUSY))
{
if ((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(9);
}
/* 产生 I2C 起始信号 */
I2C_GenerateSTART(EEPROM_I2C, ENABLE);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* 检测 EV5 事件并清除标志 */
while (!I2C_CheckEvent(EEPROM_I2C, I2C_EVENT_MASTER_MODE_SELECT))
{
if ((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(10);
}
/* 发送 EEPROM 设备地址 */
I2C_Send7bitAddress(EEPROM_I2C,EEPROM_ADDRESS,I2C_Direction_
Transmitter);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* 检测 EV6 事件并清除标志 */
while (!I2C_CheckEvent(EEPROM_I2C ,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED))
{
if ((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(11);
}
/* 通过重新设置 PE 位清除 EV6 事件 */
I2C_Cmd(EEPROM_I2C, ENABLE);
/* 发送要读取的 EEPROM 内部地址 (即 EEPROM 内部存储器的地址) */
I2C_SendData(EEPROM_I2C, ReadAddr);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* 检测 EV8 事件并清除标志 */
while (!I2C_CheckEvent(EEPROM_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTED))
{
if ((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(12);
}
/* 产生第二次 I2C 起始信号 */
I2C_GenerateSTART(EEPROM_I2C, ENABLE);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* 检测 EV5 事件并清除标志 */
while (!I2C_CheckEvent(EEPROM_I2C, I2C_EVENT_MASTER_MODE_SELECT))
{
if ((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(13);
}
/* 发送 EEPROM 设备地址 */
I2C_Send7bitAddress(EEPROM_I2C, EEPROM_ADDRESS,I2C_Direction_Receiver);
I2CTimeout = I2CT_FLAG_TIMEOUT;
/* 检测 EV6 事件并清除标志 */
while (!I2C_CheckEvent(EEPROM_I2C,
I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED))
{
if ((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(14);
}
/* 读取 NumByteToRead 个数据 */
while (NumByteToRead)
{
/* 若 NumByteToRead=1,表示已经接收到最后一个数据了,
发送非应答信号,结束传输 */
if (NumByteToRead == 1)
{
/* 发送非应答信号 */
I2C_AcknowledgeConfig(EEPROM_I2C, DISABLE);
/* 发送停止信号 */
I2C_GenerateSTOP(EEPROM_I2C, ENABLE);
}
I2CTimeout = I2CT_LONG_TIMEOUT;
while (I2C_CheckEvent(EEPROM_I2C, I2C_EVENT_MASTER_BYTE_RECEIVED)==0)
{
if ((I2CTimeout--) == 0) return I2C_TIMEOUT_UserCallback(3);
}
{
/* 通过 I2C,从设备中读取一个字节的数据 */
*pBuffer = I2C_ReceiveData(EEPROM_I2C);
/* 存储数据的指针指向下一个地址 */
pBuffer++;
/* 接收数据自减 */
NumByteToRead--;
}
}
/* 使能应答,方便下一次 I2C 传输 */
I2C_AcknowledgeConfig(EEPROM_I2C, ENABLE);
return 1;
}


















 4012
4012

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











