







提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档
一、坐标定义
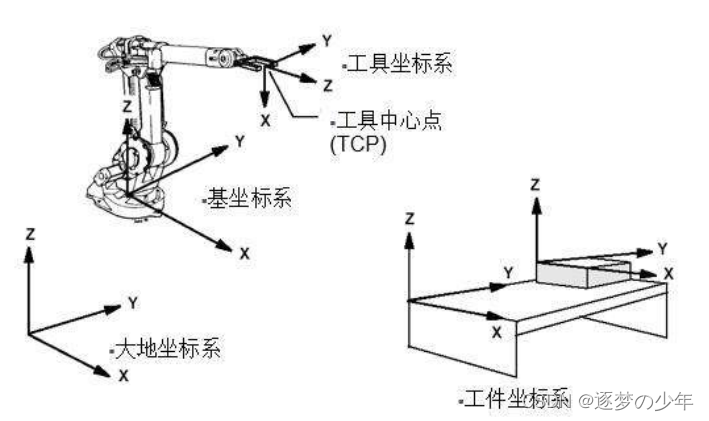
- 绝对坐标系:一般以工作现场地面为参考,是机器人所有构件的公共参考坐标系。
- 基座坐标系:一般以机器人机座为参考,是机器人各活动杆件及手部的公共参考坐标系。
- 杆件坐标系:建立在机器人单一杆件上的坐标系,随杆件的运动而运动。
- 手部坐标系:建立在机器人末端,是执行工具的参考坐标系,一般是期望控制的坐标系。
- 工件坐标系:用于描述机器人操作的工件的坐标系。
二、坐标变换
2.1 平移变换
坐标系{i}和坐标系{j}具有相同的姿态,但坐标原点不重合;坐标系{j}可看成由坐标系{i}沿矢量 平移变换而来的;矢量 为平移变换矩阵,它是一个3×1的矩阵。如下图所示:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









