









 本文介绍了LLDM中的LIBERO框架,专注于研究机器人如何在多任务学习中实现知识迁移,包括四种任务套件和不同的迁移策略。文章详细说明了安装过程,特别是与robosuite和底层模拟环境的集成,以及警告和设置建议。
本文介绍了LLDM中的LIBERO框架,专注于研究机器人如何在多任务学习中实现知识迁移,包括四种任务套件和不同的迁移策略。文章详细说明了安装过程,特别是与robosuite和底层模拟环境的集成,以及警告和设置建议。
-1.背景知识
- lifelong learning in decision making (LLDM,终身决策学习)
0.相关链接
1.基本介绍
-
用来研究机器人多任务学习和终身持续学习的知识迁移问题(有关对象或空间关系的陈述性知识和有关动作或行为的程序性知识)
-
提供:
- 一个生成管道,可以生成无限数量的操作任务
- 四个任务套件(共130个任务):
相同任务内部的迁移
- LIBERO-Spatial - LIBERO-Object - LIBERO-Goal
不同任务间的迁移
- LIBERO-100:LIBERO-90用来训练,LIBERO-10用来验证- 五个研究主题
- 三种策略网络架构
- 三种基线终身学习算法(顺序微调和持续学习)
2.安装
- 基本:
python==3.8.13
torch==1.11.0+cu113 torchvision==0.12.0+cu113 torchaudio==0.11.0
- 安装底层模拟环境
pip install robosuite
 - 下载源码
- 下载源码
- 进入源码目录
- 安装libero
pip install -e .

- 补装包bddl
pip install bddl
-
在指定文件夹下创建datasets文件夹
-
运行导包命令查看是否安装成功
from libero.libero import benchmark
from libero.libero.envs import OffScreenRenderEnv
print('successful')
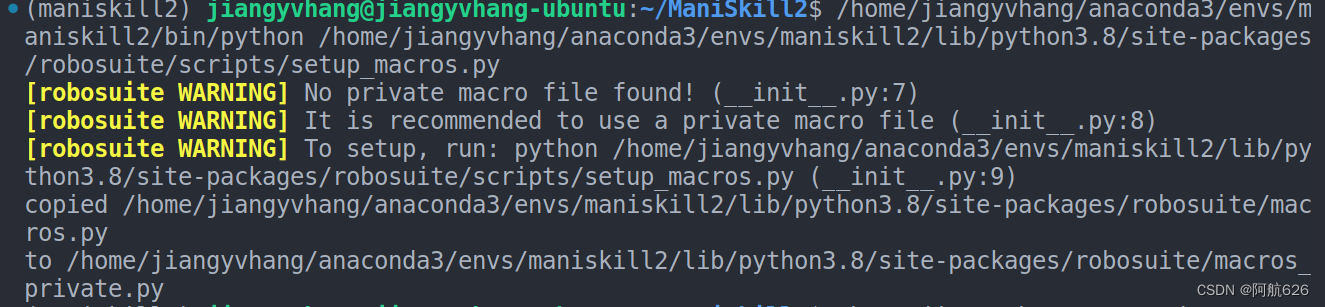
警告:
[robosuite WARNING] No private macro file found! (__init__.py:7)
[robosuite WARNING] It is recommended to use a private macro file (__init__.py:8)
[robosuite WARNING] To setup, run: python /home/jiangyvhang/anaconda3/envs/maniskill2/lib/python3.8/site-packages/robosuite/scripts/setup_macros.py (__init__.py:9)
按照提示运行指定python文件:
 再次运行测试是否安装成功
再次运行测试是否安装成功
from libero.libero import benchmark
from libero.libero.envs import OffScreenRenderEnv
print('successful')




















 723
723

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











