







 本文详细介绍了如何使用罗技G29方向盘配合Prescan软件进行半实物仿真,从硬件配置到软件安装,再到实际操作流程,包括创建实验场景、模拟驾驶环境和实现车道保持控制的步骤。
本文详细介绍了如何使用罗技G29方向盘配合Prescan软件进行半实物仿真,从硬件配置到软件安装,再到实际操作流程,包括创建实验场景、模拟驾驶环境和实现车道保持控制的步骤。
G29-Prescan半实物仿真流程
一、硬件配置
方向盘:罗技G29(通过USB-HID驱动,获取传感器信号)。
主机:i7 10700F;16GB内存;NVIDIA GeForce RTX 2060 Super 8GB显卡。
二、软件安装
(1)安装Logitech G HUB 软件,提供完整驱动,提供力反馈力度,踏板行程灵敏度。
(2)后面装Visual Studio 2013,该软件是为了提供编译环境。
(3)再装Matlab 2017b,该软件是为了提供仿真环境。
(4)最后装Prescan 2019.02,该软件是为了提供路况环境。
三、实验例子
(1)双击打开Presacn GUI,如图1所示。
图1
(2)在图1中新建一个实验场景,设置好相应的实验名称和位置,然后点击OK确认。
(3)在新建好的实验场景下构造场景的环境条件,增加场景背景,并建立道路,然后在道路周围增添建筑物、树、行人或路灯等基础设施。然后选择Inherited Path Definition按钮对道路的路径进行规划,并在合适的地方增添一些汽车,为之后的道路试验场景做准备。搭建好的场景模型如图2所示。
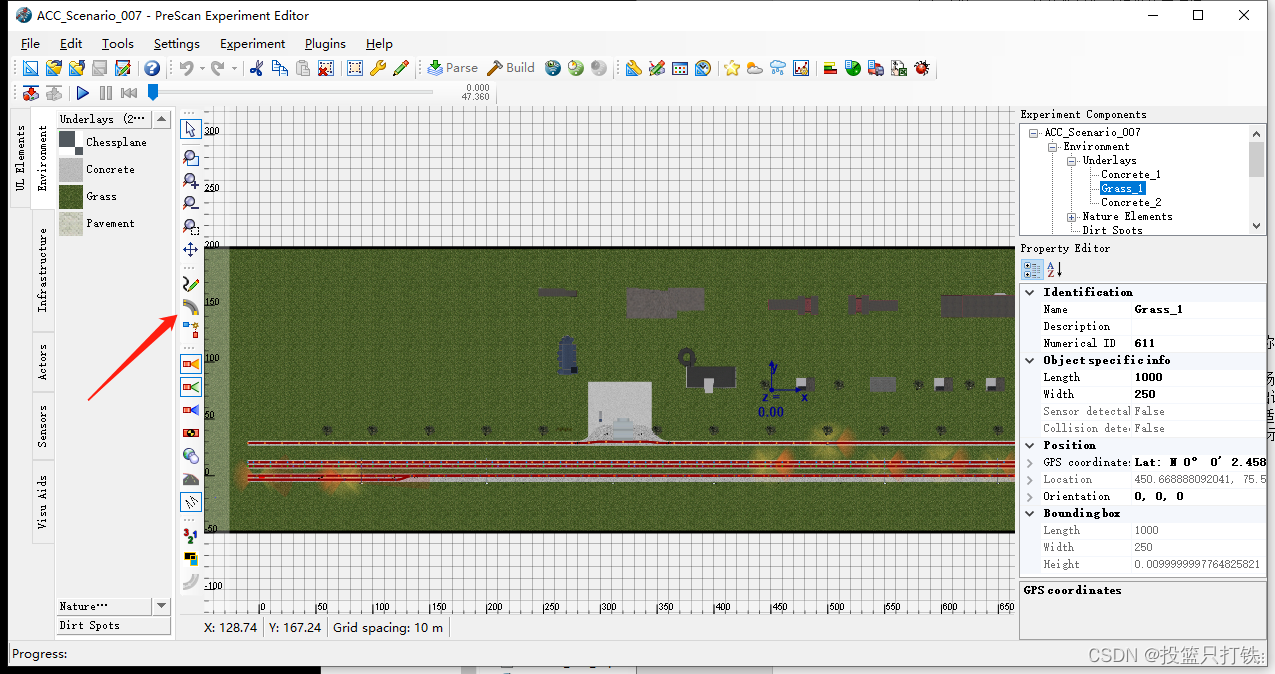
图2
(4)确认建立好的模型,点击按钮Parse和Build进行验证和仿真,如图3所示,并保存文件,将其命名为Throttle_Out_Experiment。
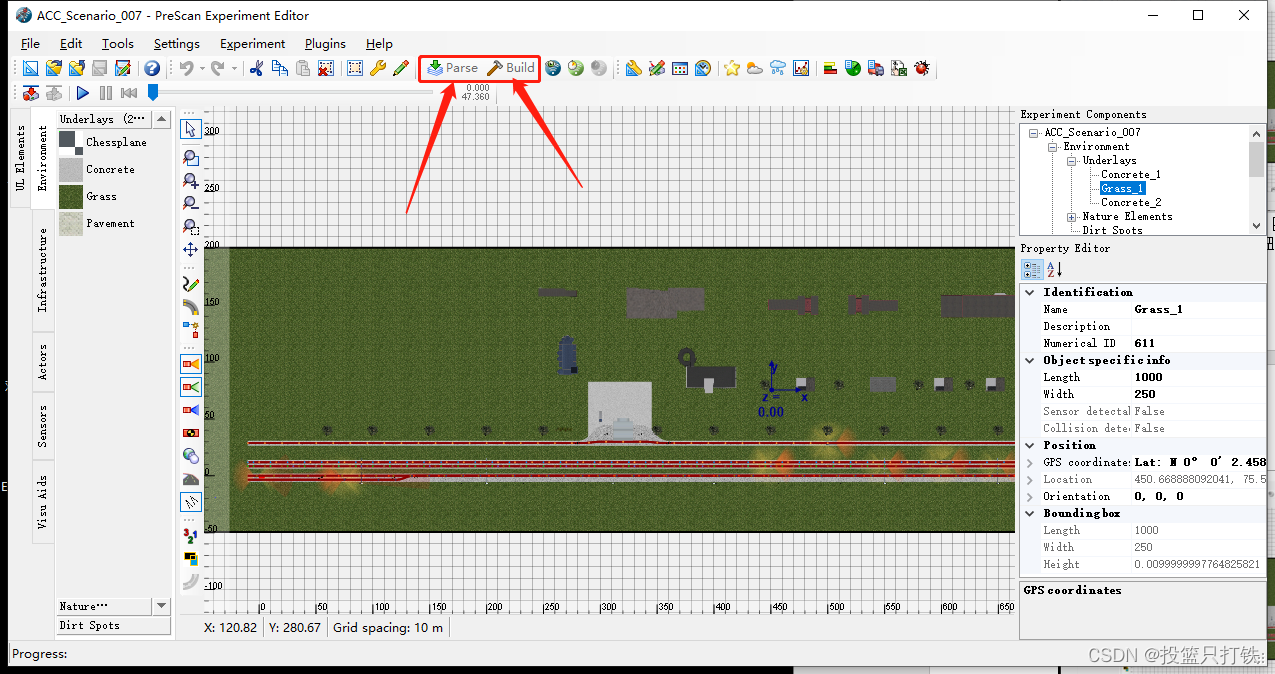
图3
(5)双击打开Prescan Process Manager,然后点击Matlab下的Start按钮来打开Matlab,如图4。
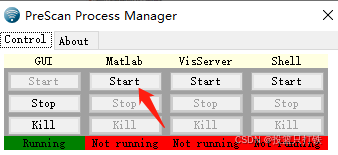
图4
(6)在Matlab当前路径中,选择步骤4保存的文件所在文件夹的路径,然后回车,如图5所示。在当前文件夹窗口里双击打开Throttle_Out_Experiment_cs文件,打开后的文件如图6所示。
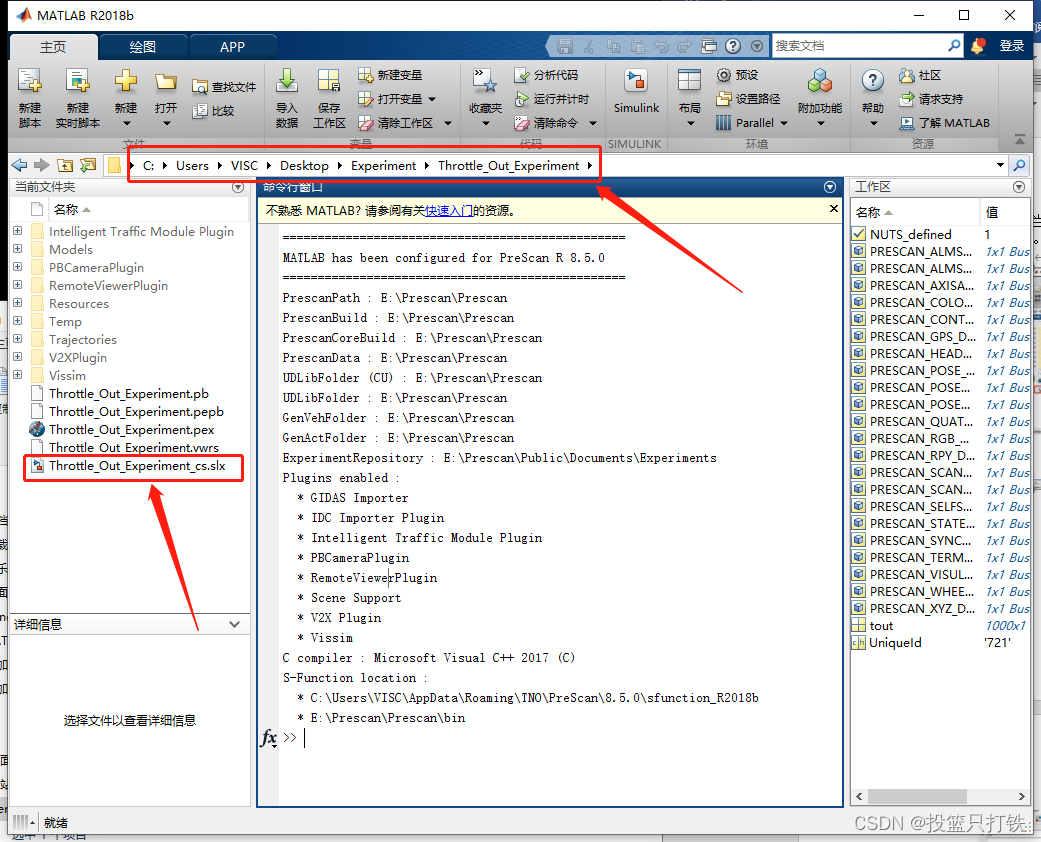
图5
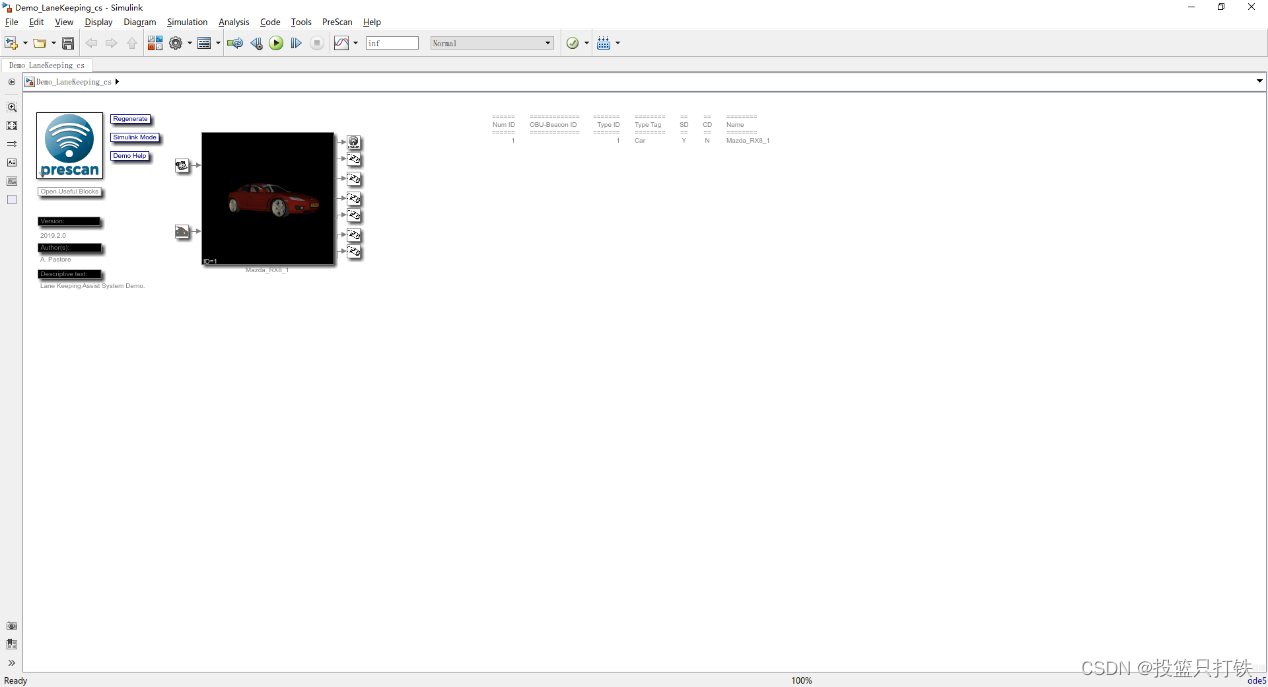
图6
(7)后期对设计完后或者程序修改完后的程序,都要点击一下图6中的Regenerate按钮。
(8)双击打开Logitech G HUB软件,如图7所示。

图7
(9)点击Prescan中的3D显示按钮,如图8所示。再点击MATLAB中的运行按钮,如图9所示,运行程序。
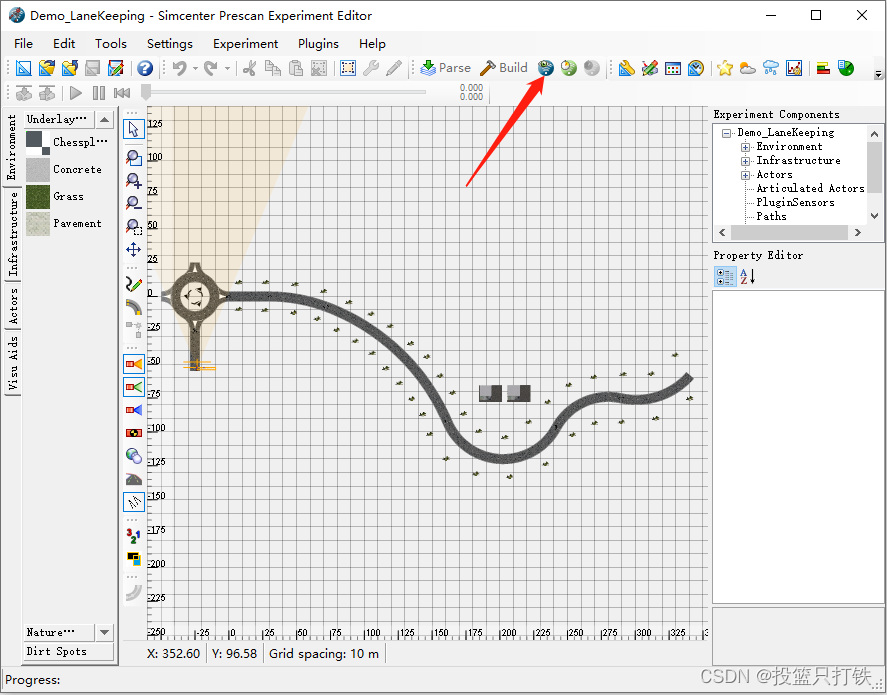
图8
图9
(10)最后,方向盘可自动转动,实现较初级的车道保持控制。


















 3400
3400

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











